


Измерение скорости и динамических факторов
ГЛАВА 4. Измерение скорости и динамических факторов
В данной главе рассматриваются принципы построения измерителей скорости и усилий, которые мы в соответствии с классификацией, приведенной в гл.3, также отнесли к классу кинестетических датчиков.
4.1. Датчики скорости
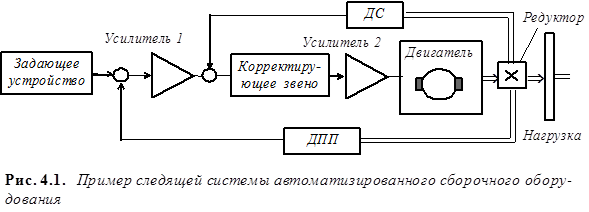
Измерение скорости в большинстве случаев сводится к определению скоростей вращающихся деталей или узлов. Задача контроля линейной скорости тоже обычно решается путем измерения скорости вращения. Поэтому под широко известным термином «тахометрические датчики» обычно понимают датчики угловой скорости (ДС). В промышленности, мехатронных и робототехнических системах ДС служат для измерения и стабилизации скорости привода в заданных пределах (рис. 4.1). Контроль скоростных показателей существенно повышает плавность хода и точностные характеристики приводов и является необходимым условием при построении систем управления позиционно-контурного типа.
Принцип действия большинства промышленных ДС основан на законе Фарадея: E = - dФ/dt, в соответствии с которым ЭДС индукции E прямо зависит от скорости изменения магнитного потока Ф. Конечно, не все ДС используют электромагнитный метод преобразования. Так, этот метод не обеспечивает необходимой точности при измерении очень малых или очень больших скоростей. Здесь возможно применение оптических (лазерных, интерферометрических и пр.) методов. В то же время, именно электромагнитные методы позволяют строить измерители скорости не нуждающиеся в источниках питания, например, использующие принцип генерации ЭДС индукции в обмотках датчика при взаимодействии его магнитной системы с ферромагнитными деталями вращающегося объекта.
Наиболее известным типом углового ДС является тахогенератор (ТГ). Среди основных задач, решаемых с помощью ТГ необходимо выделить следующие: измерение частоты вращения вала, осуществление обратной связи по скорости, а также электромеханическое интегрирование и дифференцирование.
ТГ, в отличие от ДПП не обладают такими высокими точностными характеристиками. Как правило, величина допустимой погрешности eдоп лежит в пределах десятых долей процента. Ее уровень определяется назначением и условиями эксплуатации ТГ. Так, например, при работе ТГ в качестве измерителя частоты вращения eдоп составляет 1... 2,5%. В то же время, при использовании ТГ в вычислительных устройствах, к ним предъявляют повышенные требования: нелинейность схемы и не должна превышать ~ 0,05 ... 0,1 % по амплитуде и ~ 0,1 % по фазе.
Промышленно выпускаются ТГ постоянного и переменного тока. При этом, ТГ переменного тока, так же как и двигатели переменного тока разделяются на два основных класса: асинхронные и синхронные. Рассмотрим сначала особенности построения переменного тока.
Рекомендуемые материалы
4.1.1. Тахогенераторы переменного тока
ТГ переменного тока являются наиболее распространенными ДС промышленного назначения. Их существенной особенностью является отсутствие щеточно-коллекторного узла, что значительно увеличивает срок службы. В то же время ДС этого типа требуют использования специальных схем включения. Синхронный ТГ представляет собой одно- или трехфазную машину с постоянными магнитами на роторе. Он обладает существенно нелинейной функцией преобразования, зависящей от частоты сети. Поэтому, в автоматических системах синхронные ТГ не используются.
Асинхронные ТГ (АТГ) применяются в качестве ДС в станках и приводах большой мощности, работающих от сети переменного тока. Конструкция АТГ аналогична конструкции асинхронного исполнительного двигателя с полым немагнитным ротором [ ]. На статоре в пазах уложены две обмотки, сдвинутые в пространстве на 900 . Одна из них - возбуждения (ОВ) постоянно включена в сеть, другая - генераторная (ОГ) присоединена к нагрузке Zн и является выходной (рис. 4.2).
 Проходящий по ОВ переменный ток создает магнитный поток Фпр, пульсирующий с частотой сети f. Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью ОВ, которая, как и в Р, называется продольной. Ось, перпендикулярная оси ОВ, называется поперечной.
Проходящий по ОВ переменный ток создает магнитный поток Фпр, пульсирующий с частотой сети f. Этот поток распределен в пространстве практически синусоидально и его ось совпадает с осью ОВ, которая, как и в Р, называется продольной. Ось, перпендикулярная оси ОВ, называется поперечной.
При неподвижном роторе магнитный поток Фпр пронизывает ОВ, индуцируя в ней ЭДС Eв:
Eв = 4,44 f Nв kв Фпр max,
где Nв, kв - число витков и обмоточный коэффициент обмотки возбуждения.
Пренебрегая активным сопротивлением ОВ и индуктивным сопротивлением, обусловленным потоком рассеяния, получим уравнение:
Uв + Eв = 0,
здесь Uв - напряжение сети.
В идеальном случае, в ОГ продольный поток Фпр не индуцирует ЭДС, так как эта обмотка сдвинута относительно обмотки возбуждения на 900. (Однако, практически часть потока Фпр оказывается трансформаторно связанной с ОГ и индуцирует в ней некоторую остаточную ЭДС).
 Полый ротор АТГ представляет собой совокупность «элементарных проводников». В каждом таком проводнике пульсирующий поток индуцирует ЭДС eтр называемую трансформаторной. Так как активное сопротивление полого ротора во много раз больше индуктивного, то эта ЭДС и вызываемый ею в роторе ток iтр практически совпадают по фазе. При этом условии, создаваемая током iтр МДС ротора Fпр действует по продольной оси машины, как при неподвижном, так и при вращающемся роторе. Поскольку для ОВ справедливо условие Uв + Eв = 0, то при возникновении продольной МДС ротора Fпр в ней появляется компенсирующий ток (аналогично тому, как и в Р), МДС F"пр, которого компенсирует действие МДС Fпр.
Полый ротор АТГ представляет собой совокупность «элементарных проводников». В каждом таком проводнике пульсирующий поток индуцирует ЭДС eтр называемую трансформаторной. Так как активное сопротивление полого ротора во много раз больше индуктивного, то эта ЭДС и вызываемый ею в роторе ток iтр практически совпадают по фазе. При этом условии, создаваемая током iтр МДС ротора Fпр действует по продольной оси машины, как при неподвижном, так и при вращающемся роторе. Поскольку для ОВ справедливо условие Uв + Eв = 0, то при возникновении продольной МДС ротора Fпр в ней появляется компенсирующий ток (аналогично тому, как и в Р), МДС F"пр, которого компенсирует действие МДС Fпр.
При вращении ротора каким-либо посторонним механизмом в его элементарных проводниках кроме трансформаторной ЭДС eтр индуцируется еще и ЭДС вращения eвр (рис. 4.3):
Eвр = Bx lр Vр;
где Bx - индукция в рассматриваемой точке воздушного зазора в данный момент; lр - длина ротора в магнитном поле; Vр - окружная скорость ротора.
При синусоидальном распределении индукции Bx вдоль окружности ротора максимальное значение ЭДС вращения eвр в любой момент времени достигается в том проводнике, который расположен по продольной оси АТГ. Направление этой ЭДС в элементах ротора, расположенных по обе стороны от поперечной оси, противоположное. Если пренебречь индуктивным сопротивлением полого ротора, то направление тока в каждом элементе будет совпадать с направлением ЭДС eвр. При этом условии токи ротора iвр создадут МДС Fпоп и пульсирующий магнитный поток Фпоп, направленные по поперечной оси.
Поток Фпоп не сцеплен с ОВ, следовательно в ОГ он индуцирует ЭДС Eг:
Eг = 4,44 f Nг kг Фпоп max;
где Nг , kг - число витков и обмоточный коэффициент выходной обмотки. (Существенно, что частота ЭДС Eг в ОГ не зависит от частоты вращения ротора и при любых условиях равна частоте eвр в роторе, т.е. частоте сети f, питающей ОВ. Отсюда, вытекает важное свойство АТГ - неизменность частоты выходного напряжения.
Величина ЭДС Eг в ОГ пропорциональна поперечному потоку Фпоп, причем
 Фпоп max = Fпоп max/ Rm поп,
Фпоп max = Fпоп max/ Rm поп,
где Fпоп max - максимальное значение МДС ротора по поперечной оси; Rm поп - магнитное сопротивление машины вдоль поперечной оси.
В любой асинхронной машине с полым немагнитным ротором эффективный воздушный зазор весьма велик, и, следовательно, магнитное сопротивление Rm является величиной практически неизменной. Поэтому, магнитный поток по поперечной оси будет пропорционален МДС Фпоп (которая в свою очередь, пропорциональна eвр). Однако, поскольку eвр прямо пропорциональна потоку Фпр и частоте вращения ротора n, то получим окончательно:
Uвых = Eг = c'f Фпоп max = c"f Fпоп = С'f Фпр max n, или Uвых = С"n,
где c', c", C', C" - константы.
Таким образом, при принятых допущениях ЭДС в выходной обмотке АТГ прямо пропорциональна частоте вращения ротора n, т.е. его функция преобразования может считаться линейной (рис. 4.4).
В реальных АТГ имеется отклонение реальной функции преобразования от линейной зависимости. Причины, вызывающие погрешности делятся на 4 основные группы: технологические неточности при изготовлении, электромагнитная реакция ротора, изменяющая значения потоков Фпр и Фпоп при изменении режима работы АТГ (например, частоты вращения и нагрузки), зависимость некоторых параметров от частоты вращения (например, сопротивления полого ротора), изменение сопротивления обмоток и магнитного сопротивления по различным осям под влиянием внешних факторов (температуры и др).
Наиболее серьезные погрешности вызывают технологические факторы при изготовлении АТГ. К ним относятся отклонения обмоток статора - возбуждения и генераторной от взаимно перпендикулярного положения, нарушение допусков в величине воздушного зазора и толщине полого ротора и т.д. Все это приводит к тому, что в ОГ при нулевой частоте вращения ротора, индуцируется остаточная ЭДС, называемая нулевым сигналом, величина которого достигает 0, 1 … 0,3 В (рис. 4.5). Для уменьшения нулевого сигнала используют различные решения, позволяющие вручную перемещать обмотки относительно друг друга. Например, располагая ОВ на внешнем статоре, а ОГ на внутреннем, можно настроить АТГ на минимальный нулевой сигнал путем поворота внутреннего статора и установки его в такое положение, при котором остаточная ЭДС в ОГ достигнет минимального значения.
Для уменьшение погрешностей АТГ необходимо также ограничить диапазон рабочих частот вращения так, чтобы относительная максимальная частота вращения nотн равная nотн = n/nсинх составляла:
· 0,5 ... 0,7- в АТГ, используемых в измерительных устройствах и следящих системах;
· 0,2 ... 0,3- в АТГ, используемых в счетно-решающих устройствах.
Здесь синхронная частота вращения nсинх определяется выражением nсинх = 60 f/p, где p - число пар полюсов. Следовательно, для расширения диапазона рабочих скоростей следует увеличивать nсинх, в связи с чем АТГ обычно выполняют с малым числом пар полюсов и увеличивают частоту питающей сети f = 400 ... 500 Гц.
Классы точности АТГ представлены в табл. 4.1.
Таблица 4.1. Классы точности АТГ
| Показатель | Тахогенераторы | |||||
| высокоточные | точные | общего назначения | ||||
| класс точности | ||||||
| 0,025 | 0,05 | 0,1 | 0,25 | ± 0,5 | 1,0 | |
| Нелинейность изменения выходного напряжения, % | ± 0,025 | ± 0,05 | ± 0,1 | ± 0,25 | ± 0,5 | - |
| Фазовая погрешность от изменения частоты вращения, ‘ | ± 20 | ± 20 | ± 25 | ± 30 | - | - |
Современные АТГ измеряют скорости вращения в диапазоне 10 … 104 об/мин, уровень выходного напряжения составляет 0 … 10 В, остаточное напряжение до 100 мВ. В табл. 4.2 приведены примеры некоторых промышленных моделей АТГ. Символом k обозначен коэффициент преобразования (крутизна характеристики).
Таблица 4.2. Примеры промышленных АТГ
| Модель | U,В (f, Гц) | nном, об/мин | k, В/об/мин | Rн, кОм | e, % | Æ, мм | l, мм | m, кг |
| ТГ-5А | 115 (400) | 9000 | 0,0012 | 1,2 | 2,5 | 55 | 82 | 0,28 |
| ДИГ-3 | 36 (400) | 10000 | 0,002 | 2 | 35 | 80 | 0,18 | |
| 4ТИ-3,2 | 115 (400) | 4000 | 0,003 | 30 | 0,05 | 32 | 86 | 0,32 |
Широкое использование АТГ в промышленном производстве связано с рядом очевидных достоинств этих ДС. В первую очередь, это простота и надежность конструкции, очень малый момент инерции, а также отсутствие щеточно-коллекторного узла. К недостаткам АТГ необходимо отнести необходимость стабилизации напряжения возбуждения и наличие «нулевого сигнала».
 4.1.2. Тахогенераторы постоянного тока
4.1.2. Тахогенераторы постоянного тока
ТГ постоянного тока (ТГПТ) представляет собой маломощную электрическую машину с независимым возбуждением или с постоянными магнитами (рис. 4.6). Конструктивно ТГПТ состоит из статора, выполненного в виде ферромагнитного каркаса с 2р полюсами, ротора - в виде многослойного цилиндра и щеточно-коллекторного узла. Электрические машины этого типа используются в следящих приводах постоянного тока различного назначения, системах измерения скоростей и т.д.
Функция преобразования ТГПТ (так же как и других индукционных машин) зависит от конструктивных особенностей и величины нагрузки. ЭДС индукции Ер, возникающей в электрической машине при вращении ротора относительно обмотки возбуждения, выражается зависимостью вида:

здесь p - число пар полюсов, r - количество проводников, образующих ротор, a - обмоточный параметр, Ф - поток индукции через ротор.
Обозначая все конструктивные параметры как k, получим для идеального случая (рис. 4.7):
Uвых = UТГ = k n = k dq/dt,
где n - частота вращения; k - крутизна характеристики; q - угол поворота ротора.
Данное выражение описывает линейную функцию преобразования, которая справедлива при допущении, что Фв, Rя, Rн = const. Здесь Фв - магнитный поток возбуждения; Rя - сопротивление якорной обмотки; Rн - сопротивление нагрузки. Для вычисления крутизны характеристики ТГТП k используется выражение:
где Ce = Eр/Фв n.
Наибольшая крутизна характеристики имеет место на холостом ходу, при Rн = ¥. (У современных ТГПТ k лежит в широких пределах 3 ... 100 мВ/об/мин).
 В системах управления ТГПТ представляется апериодическим звеном. Передаточная функция ТГПТ обычно апроксимируется зависимостью:
В системах управления ТГПТ представляется апериодическим звеном. Передаточная функция ТГПТ обычно апроксимируется зависимостью:
 , где
, где 
здесь С - суммарная емкость электрической машины и нагрузки.
Реальный режим работы ТГПТ значительно отличается от идеального. Среди большого количества различных источников погрешностей, обычно выделяют следующие факторы: сопротивление щеточного узла, размагничивающее действие потока реакции ротора, изменение температуры обмоток и «зубцовая пульсация» выходного напряжения.
Основное влияние на точность ТГПТ оказывает щеточно-коллекторный узел. Падение напряжения на щетках DUщ, сдвигающее характеристику датчика по оси скорости вызывает появление аддитивной погрешности Dа равной:  . Данная погрешность соответствует некоторой зоне нечувствительности при малых скоростях ротора (рис. 4.7). Другая проблема, связанная с наличием щеточно-коллекторного узла заключается в нестабильности функции преобразования (вследствие непостоянства переходного сопротивления контактов), а также излучением радиопомех.
. Данная погрешность соответствует некоторой зоне нечувствительности при малых скоростях ротора (рис. 4.7). Другая проблема, связанная с наличием щеточно-коллекторного узла заключается в нестабильности функции преобразования (вследствие непостоянства переходного сопротивления контактов), а также излучением радиопомех.
Уменьшение влияния данного узла на точность ТГПТ достигается путем снижения переходного сопротивления щеток, и экранирования корпуса. (С этой целью щетки делают из серебрянно-графитовых материалов).
Вторая особенность, присущая всем индукционным машинам связана с влиянием тока в цепи нагрузки на магнитный поток ОВ. Действительно, при Rн ¹ ¥, магнитный поток Фв уменьшается с увеличением скорости за счет размагничивающего действия потока реакции якоря. Это приводит к снижению крутизны характеристики ТГПТ, особенно заметной на больших скоростях вращения (рис. 4.7). Величина указанной мультипликативной погрешности достигает 3 %.
Магнитный поток ОВ чувствителен и к изменению температуры окружающей среды. Например, тепловые эффекты, возникающие в процессе работы ТГПТ, приводят к увеличению сопротивления обмоток ротора и возбуждения. При этом, поскольку сопротивление роторной обмотки Rя очень мало, его изменение практически не влияет на выходной сигнал. Существенно большее влияние оказывает изменение сопротивления ОВ, приводящее к уменьшению тока возбуждения, а, следовательно, и магнитного потока Фв, что снижает крутизну характеристики ТГПТ. (Величина этой дополнительной погрешности может достигнуть ~ 5%). Для компенсации температурной чувствительности наиболее распространен способ, при котором в цепь ОВ включается термонезависимое сопротивление Rдоб, такое, что Rдоб > Rов, где Rов - сопротивление ОВ.
В таком случае, величина тока возбуждения будет определяться в основном величиной Rдоб и, следовательно, мало зависеть от Rов. Тогда
Iв = Uв/(Rдоб + Rов) » const
Другой путь предполагает использование ТГПТ с постоянными магнитами, не имеющими ОВ.
Наконец, для ТГПТ характерны некоторые зубцовые пульсации выходного напряжения, возникающие вследствие неравномерности воздушного зазора, вибраций щеток и т.д. Для уменьшения погрешностей этого вида в конструкции ТГПТ используют полый ротор (он выполнен в виде стакана, состоящего из обмотки, проводники которой, связаны воедино пластмассой). У таких датчиков момент инерции ротора весьма мал, а также отсутствуют пульсации выходного напряжения, поскольку ротор не имеет зубцов. Классы точности ТГПТ приведены в табл. 4.3.
Таблица 4.3. Классы точности ТГПТ
| Показатель | Тахогенераторы | ||||||
| высокоточные | точные | общего назначения | |||||
| класс точности | |||||||
| 0,02 | 0,05 | 0,1 | 0,2 | ± 0,5 | 1,0 | 2,5 | |
| Нелинейность изменения выходного напряжения, % | ± 0,02 | ± 0,05 | ± 0,1 | ± 0,2 | ± 0,5 | - | - |
| Асимметрия выходного напряжения, % | ± 0,025 | ± 0,05 | ± 0,125 | ± 0,25 | ± 0,5 | ± 1,25 | ± 2,5 |
В номинальном режиме суммарная погрешность ТГПТ лежит в пределах 1,0 ... 4,0 %.
ТГПТ широко используются при построении следящих систем различного назначения: в приводах механизмов черной металлургии (транспортеры, прокатные станы), на транспорте (электропоезда), грузоподъемных устройствах (манипуляторы, краны), а также во многих устройствах автоматики. На рис. 4.8 представлена схема системы управления, получившей название «электромашинный усилитель - исполнительный двигатель» (сокращенно «ЭМУ-ИД»). Схема нашла применение в задачах управления объектами, имеющими большой момент инерции. В табл. 4.4 представлены характеристики некоторых известных моделей ТГПТ.
Таблица 4.4. Примеры промышленных ТГПТ
| Модель | nном, об/мин | k, В/об/мин | Rн, кОм | e, % | Æ, мм | l, мм | m, кг |
| ТГП-5 | 6000 | 0,004 | 10 | 5 | 37 | 48 | 0,09 |
| ТД-103 | 1500 | 0,1 | 1,2 | 2,5 | 55 | 98 | 0,7 |
| TS-252 | 4000 | 0,003 | 0,4 | 1,4 | 40 | 50 | 0,1 |
Примечание. Модель TS-252 разработана фирмой Tamagawa, Япония.
ТГПТ наиболее часто используются в мехатронных устройствах и системах управления общего назначения. Их достоинства: большая выходная мощность, отсутствие фазовой погрешности (при активной нагрузке), а также отсутствие обмоток возбуждения (для ТГПТ с постоянными магнитами) сделали ДС этого типа привлекательными для большого числа прикладных задач. Недостатки ТГПТ связаны с большей, по сравнению с АТГ стоимостью, нестабильность выходной характеристики и наличием пульсаций напряжения. Также ТГПТ создают радиопомехи.
4.2. Датчики динамических величин
К датчикам динамических величин (ДДВ) относятся информационные устройства, преобразующие изменение динамических факторов (силы, ускорения и давления) в изменение электрического сигнала.
Датчики этого типа весьма распространены в различных системах контроля и диагностики. Практически нет такой области техники, где в процессе измерения не использовались бы методы преобразования динамических параметров. Характерными задачами являются контроль параметров натяжения всевозможных лент и полос в бумажной промышленности и металлургии, измерение сил на валках клетей прокатных станов, предохранение от перегрузок в подъемных механизмах и транспортных средствах, наконец, контроль весовых и инерционных характеристик различных объектов. Использование ДДВ в системах управления и робототехнике позволяет регулировать момент на валу привода или ускорение выходного вала и реализовывать сложные законы управления звеньями исполнительного механизма.
ДДВ классифицируются по четырем основным признакам:
1. По назначению: датчики систем управления (к ним относятся измерители момента/силы на валу, давления в магистрали и акселерометры) и датчики контроля (в основном контроля технологических параметров и параметров безопасности).
2. По физическому принципу преобразования: пьезоэлектрические, магнитоупругие, тензометрические (омические), электродинамические, емкостные и индуктивные.
3. По способу создания противодействующей силы: датчики совмещенного преобразования (содержат электрически активный упругий преобразователь, реакция которого создается упруго-чувствительным элементом), датчики раздельного преобразования (включают электрически неактивный упругий преобразователь) и датчики с силовым уравновешиванием (сила реакция создается электрическими способами).
4. По виду выходной величины: генераторные («активные», выходной сигнал имеет форму заряда, напряжения или тока) и параметрические («пассивные», с выходным сигналом в виде изменения сопротивления, индуктивности и емкости).
Придерживаясь указанной классификации, рассмотрим способы построении ДДВ, основанных на наиболее известных принципах преобразования: пьезоэлектрических, магнитоупругих, емкостных и индуктивных.
4.2.1. Пьезоэлектрические датчики
 Пьезоэлектрические датчики динамических величин (ПДДВ) представляют собой преобразователи электрической энергии в механическую (и наоборот). Основу ПДДВ составляют один или несколько пьезоэлектрических ЧЭ - пьезоэлементов, электрически и механически связанных между собой в измерительную схему. Каждый пьезоэлемент выполнен в виде кварцевой или керамической пластины и является генераторным упруго-чувствительным преобразователем, способным накапливать электрическую энергию. Поэтому, при построении измерительных цепей широко применяются схемы последовательного и параллельного соединения пьезоэлементов. При последовательном соединении (рис. 4.9а) увеличивается напряжение в цепи, а суммарная емкость уменьшается соответственно числу ЧЭ, а при параллельном (рис. 4.9б) увеличиваются и накопленный заряд и емкость. Такая схема подобна зарядовой батарее. В электрическом смысле пьезоэлемент подобен конденсатору, и, следовательно, он измеряет переменные внешние воздействия. В то же время, применением специальных схем (зарядовых усилителей и др.) можно существенно снизить граничные частоты (до 10-3 Гц) и повысить тем самым постоянную времени до нескольких часов. Измерения в этом случае получили название квазистатических. Таким образом, функция преобразования ПДДВ примет вид: F = k i = k dQ/dt. В простых расчетах полагают F » kU, где F - измеряемый параметр (например, сила), i и Q - ток через пьезоэлемент и его заряд.
Пьезоэлектрические датчики динамических величин (ПДДВ) представляют собой преобразователи электрической энергии в механическую (и наоборот). Основу ПДДВ составляют один или несколько пьезоэлектрических ЧЭ - пьезоэлементов, электрически и механически связанных между собой в измерительную схему. Каждый пьезоэлемент выполнен в виде кварцевой или керамической пластины и является генераторным упруго-чувствительным преобразователем, способным накапливать электрическую энергию. Поэтому, при построении измерительных цепей широко применяются схемы последовательного и параллельного соединения пьезоэлементов. При последовательном соединении (рис. 4.9а) увеличивается напряжение в цепи, а суммарная емкость уменьшается соответственно числу ЧЭ, а при параллельном (рис. 4.9б) увеличиваются и накопленный заряд и емкость. Такая схема подобна зарядовой батарее. В электрическом смысле пьезоэлемент подобен конденсатору, и, следовательно, он измеряет переменные внешние воздействия. В то же время, применением специальных схем (зарядовых усилителей и др.) можно существенно снизить граничные частоты (до 10-3 Гц) и повысить тем самым постоянную времени до нескольких часов. Измерения в этом случае получили название квазистатических. Таким образом, функция преобразования ПДДВ примет вид: F = k i = k dQ/dt. В простых расчетах полагают F » kU, где F - измеряемый параметр (например, сила), i и Q - ток через пьезоэлемент и его заряд.
Обратимый характер пьезоэффекта позволяет конструировать не только электромеханические и механоэлектрические ПДДП, но и преобразователи, использующие оба типа пьезоэффекта. Так, ПДДВ прямого пьезоэффекта применяются в приборах для измерения силы, давления, ускорения; ПДДВ обратного пьезоэффекта, используются в качестве излучателей ультразвуковых колебаний, преобразователей напряжения в деформацию (в пьезоэлектрических реле, исполнительных элементах автоматических систем и т.д.). ПДДВ, основанные одновременно на прямом и обратном пьезоэффекте (к ним относятся пьезорезонаторы, коэффициент преобразования которых максимален на резонансной частоте) применяются в качестве узкополосных и резонансных фильтров.
В большинстве случаев при построении ПДДВ используется несколько ЧЭ в виде кварцевых дисков, ориентированных вдоль одной или нескольких осей декартовой системы координат и соединенных таким образом, чтобы выходной сигнал каждого был максимальным (рис. 4.10). Так, для датчиков силы, верхняя граница измеряемого усилия определяется площадью нагружаемой поверхности и для промышленных образцов составляет ±(2 …. 200) кН. Чувствительность такого диска зависит от типа пьезоэффекта и определяется значениями пьезоэлектрических коэффициентов dij. В частности (как отмечалось в разд. 2.1.5), матрица  пьезомодулей кварца содержит только 5 коэффициентов и чувствительность пьезоэлемента Х-среза к растяжению-сжатию (при отсутствии паразитных боковых воздействий) проявляется через коэффициент d11. Аналогично, пьезоэлемент Y-среза чувствителен к сдвигу (коэффициент d26). Следовательно, применяя ЧЭ разных срезов можно построить многокомпонентный датчик силы. Метрологические характеристики ПДДВ, как правило, очень высокие. Для них характерна высокая линейность (вследствие высокой жесткости конструкции) и малая зона нечувствительности.
пьезомодулей кварца содержит только 5 коэффициентов и чувствительность пьезоэлемента Х-среза к растяжению-сжатию (при отсутствии паразитных боковых воздействий) проявляется через коэффициент d11. Аналогично, пьезоэлемент Y-среза чувствителен к сдвигу (коэффициент d26). Следовательно, применяя ЧЭ разных срезов можно построить многокомпонентный датчик силы. Метрологические характеристики ПДДВ, как правило, очень высокие. Для них характерна высокая линейность (вследствие высокой жесткости конструкции) и малая зона нечувствительности.
Простейший ПДДВ представляет собой совокупность кварцевых или пьезокерамических пластин (рис. 4.11а) или колец, установленных соосно. (Обычно вместо дисков используются кольца). Каждое кольцо ПДДВ, представляющее собой совмещенный упруго-чувствительный элемент X-среза, работает на продольном пьезоэффекте (как известно, в этом случае плотность заряда не зависит от геометрических размеров кольца). Одна из наиболее известных конструкций ПДДВ этого типа была разработана фирмой Hellwett-Packard. Датчик состоял из двух колец, включенных последовательно относительно силы и параллельно электрически (такое соединение получило название конденсаторного). Верхний предел измерения составлял ~ 1000 кН при диаметре датчика равном 10 см. Соединяя два таких датчика можно увеличить чувствительность конструкции, правда, с потерей жесткости.
 Промышленностью выпускаются различные пьезокерамические материалы, позволяющие конструировать высокочувствительные датчики. Так, серийные пьезокерамические диски из материала ЦТС-19 имеют крутизну ku ~ 1 ... 5 В/Н.
Промышленностью выпускаются различные пьезокерамические материалы, позволяющие конструировать высокочувствительные датчики. Так, серийные пьезокерамические диски из материала ЦТС-19 имеют крутизну ku ~ 1 ... 5 В/Н.
Существенный недостаток простых конструкций связан с эффектом стекания заряда, вызывающим постепенное уменьшение сигнала при статических измерениях. Этот эффект приводит к невозможности использования таких схем при длительных измерениях. (Как уже отмечалось, постоянная времени ПДДВ t = 103 сек, при типичной емкости датчика Cд ~100 пФ и суммарном сопротивлении изоляции Rиз ~ 1013 Ом). Следовательно, нижняя частотная граница измеряемого сигнала составит fн = wн /2p = 1,6 10-4 Гц. Поэтому, при статических измерениях уже через 10 с погрешность e превысит 0,1%.
Для устранения эффекта стекания заряда ПДДВ строят по схеме пьезоэлектрического трансформатора переменного тока, работающие, в зависимости от резонансной частоты, в диапазонах от 20 Гц до 200 кГц. Одна из первых конструкций поперечно-продольного повышающего пьезотрансформатора, предложенная С.А. Розеном приведена на рис. 4.11б. Устройство состоит из двух секций -входной и выходной. Направления поляризации показаны стрелками. Коэффициент трансформации подобных систем, включенных в режиме Т-образного четырехполюсника, достигает 1000 единиц и более. На рис. 4.12 представлена схема использования трансформаторного ПДДВ в качестве датчика статической силы. Особенностью конструкции является использование трех обкладок, одной общей для входной и выходной цепи и двух изолированных. Переменное напряжение Uи подзаряжает датчик, при этом уровень выходного сигнала Uи пропорционален величине измеряемой силы.В последние годы в информационных системах все чаще применяются резонаторные ПДДВ, в том числе, основанные на эффекте возбуждения поверхностных акустических волн. Резонаторные датчики выполняются в виде двухполюсника, объединяющего систему электрического возбуждения механических колебаний и съема электрического сигнала. Если частота приложенного напряжения совпадает с одной из собственных механических частот датчика, то возникнет резонанс, сопровождающийся резким уменьшением полного сопротивления Z и  увеличением тока через резонатор. Спектр колебаний определяется размером, конструкцией и упругими свойствами материала. Резонансные свойства ПДДВ зависят от его добротности Q = 2p fр Lэ/Rд, где fр - резонансная частота, Lэ и Rд - соответственно эквивалентная индуктивность резонатора и его динамическое активное сопротивление. Наивысшей добротностью Q = 107 обладают кварцевые резонаторы (для сравнения Q колебательного контура = 102, Q пьезокерамического резонатора = 103). Полное сопротивление принимает два экстремальных значения на частотах fр и fа, называемые частотами резонанса и антирезонанса.
увеличением тока через резонатор. Спектр колебаний определяется размером, конструкцией и упругими свойствами материала. Резонансные свойства ПДДВ зависят от его добротности Q = 2p fр Lэ/Rд, где fр - резонансная частота, Lэ и Rд - соответственно эквивалентная индуктивность резонатора и его динамическое активное сопротивление. Наивысшей добротностью Q = 107 обладают кварцевые резонаторы (для сравнения Q колебательного контура = 102, Q пьезокерамического резонатора = 103). Полное сопротивление принимает два экстремальных значения на частотах fр и fа, называемые частотами резонанса и антирезонанса.
Резонаторные ПДДВ обычно включаются в измерительные схемы, использующие частотную или временную модуляцию сигналов.
 При расчете ПДДВ и выбора компонентов измерительной цепи широко используются эквивалентные схемы, учитывающие особенности работы прибора. Простая схема включения ПДДВ предполагает использование следующих электрических компонентов: собственно пьезоэлемента, обладающего некоторым импедансом, обкладок, подводящих проводов, а также последующего усилителя сигнала. Как отмечалось в разд. 1.1 ПДДВ относится к датчикам второго порядка, и, следовательно, его свойства зависят от рабочей частоты. Поэтому, и эквивалентная схема ПДДВ имеет разный вид на разных рабочих частотах. (Действительно, такие параметры, как сопротивление утечки, изоляции и т.д. зависят от используемого диапазона частот). Наибольшее распространение получила эквивалентная схема Тевенина (рис. 4.13б), и ее упрощенный вариант (рис.4.13в), составленный в предположении, что сопротивление изоляции пьезоматериала достаточно велико. Заметим, что импеданс ПДДВ на малых частотах в основном определяется активной составляющей сопротивления изоляции, в то время как на средних и высоких частотах проявляются реактивные составляющие. На рис. 4.13 обозначено: Rд - сопротивление изоляции (оно соответствует импедансу датчика на малых частотах), Cд - импеданс датчика на средних и высоких частотах, Rк, Cк - сопротивление и емкость коаксиального кабеля. Сопротивление и емкость изоляции Rи, Cи определяются зависимостями:
При расчете ПДДВ и выбора компонентов измерительной цепи широко используются эквивалентные схемы, учитывающие особенности работы прибора. Простая схема включения ПДДВ предполагает использование следующих электрических компонентов: собственно пьезоэлемента, обладающего некоторым импедансом, обкладок, подводящих проводов, а также последующего усилителя сигнала. Как отмечалось в разд. 1.1 ПДДВ относится к датчикам второго порядка, и, следовательно, его свойства зависят от рабочей частоты. Поэтому, и эквивалентная схема ПДДВ имеет разный вид на разных рабочих частотах. (Действительно, такие параметры, как сопротивление утечки, изоляции и т.д. зависят от используемого диапазона частот). Наибольшее распространение получила эквивалентная схема Тевенина (рис. 4.13б), и ее упрощенный вариант (рис.4.13в), составленный в предположении, что сопротивление изоляции пьезоматериала достаточно велико. Заметим, что импеданс ПДДВ на малых частотах в основном определяется активной составляющей сопротивления изоляции, в то время как на средних и высоких частотах проявляются реактивные составляющие. На рис. 4.13 обозначено: Rд - сопротивление изоляции (оно соответствует импедансу датчика на малых частотах), Cд - импеданс датчика на средних и высоких частотах, Rк, Cк - сопротивление и емкость коаксиального кабеля. Сопротивление и емкость изоляции Rи, Cи определяются зависимостями:
1/Rи = 1/Rд + 1/Rк и Cи = Cд + Cк
 Нагрузкой для ППДВ обычно служит усилитель заряда или напряжения с высокоомным входным сопротивлением. Его эквивалентная схема также представляется параллельным соединением резистора Rн и конденсатора Cн. Таким образом, суммарная эквивалентная измерительная схема, включающая все элементы цепи примет вид представленный на рис. 4.14а. Эквивалентные сопротивление и емкость измерительной схемы (рис. 4.14б) равны соответственно:
Нагрузкой для ППДВ обычно служит усилитель заряда или напряжения с высокоомным входным сопротивлением. Его эквивалентная схема также представляется параллельным соединением резистора Rн и конденсатора Cн. Таким образом, суммарная эквивалентная измерительная схема, включающая все элементы цепи примет вид представленный на рис. 4.14а. Эквивалентные сопротивление и емкость измерительной схемы (рис. 4.14б) равны соответственно:  , Cэкв = Си + Сн. Характеристики ПДДВ определяются стабильностью параметров элементов образующих схему. Поэтому, для точных измерений недопустимо заменять отдельные элементы, даже на функционально подобные. (Так, в [ ] приведен пример, показывающий, что чувствительность датчика с Сд = 1000 пФ снижается на 11% при подключении усилителя с Сн = 10 пФ коаксиальным кабелем длиной 1 м с Ск = 100 пФ/м). Кроме того, параметры всех элементов зависят от температуры, например, сопротивление изоляции Rд уменьшается на порядок каждые 33 оС (рис. 4.14в).
, Cэкв = Си + Сн. Характеристики ПДДВ определяются стабильностью параметров элементов образующих схему. Поэтому, для точных измерений недопустимо заменять отдельные элементы, даже на функционально подобные. (Так, в [ ] приведен пример, показывающий, что чувствительность датчика с Сд = 1000 пФ снижается на 11% при подключении усилителя с Сн = 10 пФ коаксиальным кабелем длиной 1 м с Ск = 100 пФ/м). Кроме того, параметры всех элементов зависят от температуры, например, сопротивление изоляции Rд уменьшается на порядок каждые 33 оС (рис. 4.14в).
В ПДДВ используются измерительные схемы как генераторного, так и параметрического типов. Наиболее известными генераторными схемами являются усилители с высокоомным входом или специальные зарядовые усилители. Параметрические измерительные цепи строятся на основе мостовых схем.
В датчиках сил и аксельрометрах чаще всего используются усилители переменного тока с высоким входным сопротивлением (не менее 500 Мом) и относительно невысоким усилением ~ 10 (рис. 4.15). Надежность схемы определяется стабильностью всех элементов, особенно конденсатора С1. Благодаря нему все изменения заряда DQ, вызванные действием ускорений передаются на вход усилителя. Коэффициент преобразования измерительной схемы равен:
 ,
,
Усилитель необходимо размещать вблизи датчика.
Зарядовый усилитель (рис. 4.16а) представляет собой достаточно сложный функциональный преобразователь «заряд - напряжение».
 Первый блок (собственно преобразователь заряда) обычно устанавливается совместно (в одном корпусе) с ПДДВ. Последующие каскады, выполняющие функции согласования и фильтрации сигналов, могут быть отнесены от первого блока на некоторое расстояние. Эквивалентная схема зарядового усилителя представлена на рис. 4.16б. На практике для измерения квазистатических сигналов стремятся максимально поднять постоянную времени t = RиCу, однако при этом возрастают пироэлектрические шумы датчика, а также шумы линии связи. Функция преобразования ПДДВ с зарядовым усилителем в области низких частот имеет вид:
Первый блок (собственно преобразователь заряда) обычно устанавливается совместно (в одном корпусе) с ПДДВ. Последующие каскады, выполняющие функции согласования и фильтрации сигналов, могут быть отнесены от первого блока на некоторое расстояние. Эквивалентная схема зарядового усилителя представлена на рис. 4.16б. На практике для измерения квазистатических сигналов стремятся максимально поднять постоянную времени t = RиCу, однако при этом возрастают пироэлектрические шумы датчика, а также шумы линии связи. Функция преобразования ПДДВ с зарядовым усилителем в области низких частот имеет вид:
 .
.
Пьезоэлементы могут объединяться в измерительную схему не только генераторного, но и параметрического типа. За последние годы появились новые технологические приемы, позволяющие выращивать пьезоэлектрические структуры непосредственно на поверхности упругого элемента. Данные технологии, широко применяемые в тензометрических измерительных системах, теперь позволяют строить интегральные ПДДВ по схеме раздельного преобразования. В частности, подобные датчики силы, давления, аксельрометры разработаны фирмой «Honeywell», США (рис. 4.17). Во всех датчиках используются пьезорезистивные диффузионные ЧЭ, объединенные в мостовую измерительную схему. Упругим элементом, на котором расположены четыре ЧЭ, служит кремниевая диафрагма. С целью  снижения погрешности предусмотрены меры по компенсации смещения нуля и изменения температурной чувствительности. Для этого используются внешние навесные элементы, а питание датчиков осуществляется от источника тока. На рис. 4.17 представлен пример включения датчика усилий серии FS с регулировкой смещения нуля и чувствительности. Интегральная измерительная цепь содержит усилитель с буферными каскадами (разд. 2.3). Выходной сигнал ПДДВ определяется выражением: Uвых = (U2 – U4) (1+2R/R1) + Uсм.
снижения погрешности предусмотрены меры по компенсации смещения нуля и изменения температурной чувствительности. Для этого используются внешние навесные элементы, а питание датчиков осуществляется от источника тока. На рис. 4.17 представлен пример включения датчика усилий серии FS с регулировкой смещения нуля и чувствительности. Интегральная измерительная цепь содержит усилитель с буферными каскадами (разд. 2.3). Выходной сигнал ПДДВ определяется выражением: Uвых = (U2 – U4) (1+2R/R1) + Uсм.
В завершение приведем характеристики некоторых моделей ПДДВ (табл. 4.5).
Таблица 4.5. Примеры промышленных ПДДВ
| Модель | Измеряемый параметр | Диапазон | S | e, % | Размеры, мм | m, кг |
| ДХП 096 | Звуковое давление | 0 ... 80 кГц | 4мкВ/Па | 2 | Æ4´25 | 0,005 |
| ДПС 003 | Динамическое давление | 0 ... 5 106 Па (f до 25 кГц) | 1 10-4 мВ/Па | 10 | 27´55 | 0,25 |
| АЛО 034 | Ускорение | 0 ...± 6 м/с2 | 1 В/м/с2 | 1 | 46´46´47 | 0,4 |
| Вибрации | 0 ... 1000 g | 10 мВ/g | Æ20´25 | 0,005 | ||
| K 9077 | Усилия (Fx, Fy, Fz) | 0 ... 88 кН (Fx, Fy) 0 ... 200 кН (Fz) | 3,7 пКл/Н (Fx,Fy) 2 пКл/Н (Fz) | 1 (1) 3* | Æ100´25 | 0,9 |
| FSG15N1 | Усилие | 15 Н | 0,24 мВ/г | 1,5 | 12,7´8´9 | 0,1 |
| К 9233 | Деформация | 0 ... ±300 мСт | 6 пКл/мСт | 1 (2) | 30´40´54 | 0,21 |
Примечание.
1. Модели K 9077 и К9233 разработаны фирмой Kistler, Германия, FSG15N1 -фирмой Honeywell.
2. * Погрешности датчиков K 9077, К 9233: 1% - линейность, в скобках - гистерезис, 3% - перекрестные влияния.
3. 1 мСт (microstrain, me) единица применяемая фирмой Kistler для обозначения относительного удлинения 1me = 10-6 м/м.
ПДДВ в измерительных системах используются чрезвычайно широко. Их достоинства: высокая механическая жесткость, широкий диапазон измерения (для сил 10-1 Н ... 106 Н), малые габариты и вес, а также стабильность характеристик сделали их основой большинства силоизмерительных установок. Некоторые модели стали базовыми. Такой моделью, в частности, явился датчик силы фирмы Hellwett-Packard с двумя пластинами толщиной 1 мм. При механическом напряжении s ~ 15 кг/мм2 его деформация составляет всего ~ 2 10-3 мкм. Однако, ПДДВ не лишены и недостатков. В первую очередь, это зависимость точности измерения от частоты входного сигнала и чувствительность к загрязнению, температуре и влажности.
4.2.2. Магнитоупругие датчики
Магнитоупругие ДДВ (МДДВ) предназначены для измерения динамических факторов и основаны на обратимом преобразовании энергии магнитного поля и энергии механических колебаний. МДДВ используются в тех же задачах, что и ПДДВ, и также включаются в генераторные и параметрические измерительные схемы.
 В основе работы МДДВ лежит явление магнитоупругости (обнаружено в 1865 году Э. Виллари), основанное на изменении намагниченности сердечника из ферро- и ферримагнетика при деформации. Обратный по отношению к магнитоупругости эффект - магнитострикция, заключающийся в изменении размеров и формы сердечника при намагничивании был открыт Дж. П. Джоулем в 1842 году.
В основе работы МДДВ лежит явление магнитоупругости (обнаружено в 1865 году Э. Виллари), основанное на изменении намагниченности сердечника из ферро- и ферримагнетика при деформации. Обратный по отношению к магнитоупругости эффект - магнитострикция, заключающийся в изменении размеров и формы сердечника при намагничивании был открыт Дж. П. Джоулем в 1842 году.
Магнитоупругий эффект по своему проявлению во многом подобен пьезоэффекту (эти системы рассматриваются как дуальные цепи). В то же время, использование МДДВ позволяет получить существенно большую номинальную измерительную мощность (на несколько порядков). В отличии от пьезоэлектрических ДДВ (типа кварца), обладающих линейными электрическими свойствами, магнитоупругие материалы ферромагнитны, т.е. являются нелинейными и по своим характеристикам сравнимыми с сегнетоэлектриками. Поэтому, изменение электрических и магнитных свойств этих материалов при механическом воздействии наиболее просто описывается кривой гистерезиса (D и В - вектора поляризации и индукции, соответственно, рис. 4.18). Действие механических напряжений s в ферромагнетике деформирует его кривую намагниченности (за счет изменения магнитной проницаемости m и взаимной или остаточной индукции Вост). Различают линейную и объемную магнитоупругость (рис. 4.19б, в). В первом случае, величина относительной линейной деформации составляет 10-2... 10-6, во втором - величина относительной объемной деформации DV/V достигает 10-5 (для инварных сплавов).
 В качестве материала для упруго-чувствительных элементов МДДВ пригоден любой ферромагнитный материал, со значительной магнитострикцией насыщения. Чаще всего используются трансформаторные стали (железо-кремниевые сплавы), отличающиеся низкой стоимостью, но и невысокой чувствительностью, пермаллои (термообработанные железо-никелевые сплавы), наоборот, обладающие высокой чувствительностью, но и высокой стоимостью; а также специальные магнитоупругие материалы. К ним относятся железо-алюминиевые сплавы, имеющие такую же чувствительность, но в пять раз большее удельное сопротивление, чем пермаллой. (Это обеспечивает гораздо более глубокое проникновение магнитного поля, и лучшие характеристики датчика).
В качестве материала для упруго-чувствительных элементов МДДВ пригоден любой ферромагнитный материал, со значительной магнитострикцией насыщения. Чаще всего используются трансформаторные стали (железо-кремниевые сплавы), отличающиеся низкой стоимостью, но и невысокой чувствительностью, пермаллои (термообработанные железо-никелевые сплавы), наоборот, обладающие высокой чувствительностью, но и высокой стоимостью; а также специальные магнитоупругие материалы. К ним относятся железо-алюминиевые сплавы, имеющие такую же чувствительность, но в пять раз большее удельное сопротивление, чем пермаллой. (Это обеспечивает гораздо более глубокое проникновение магнитного поля, и лучшие характеристики датчика).
Рассмотрим сущность магнитоупругого эффекта. Ферромагнитные (в технических устройствах обычно поликристаллические) материалы состоят из большого числа доменов размером 0,1 ... 10 мкм, внутри которых из-за обменных сил происходит упорядочение элементарных магнитов. Решающее влияние на магнитную характеристику оказывают направления векторов самопроизвольного намагничивания в отдельных доменах. При отсутствии упругих напряжений и внешних магнитных полей, эти векторы ориентируются параллельно или антипараллельно осям легкого намагничивания (рис. 4.19а). Такими осями, например, у железа являются ребра кубической ячейки кристаллической решетки, т.е. кристаллографические направления 100, у никеля - диагонали кубической ячейки - направления 111. Состояние равновесия домена нарушается, при возникновении внешнего магнитного поля H, внутренних или внешних напряжений s. Однако, через некоторое время в материале будет достигнуто новое состояние равновесия самопроизвольной намагниченности. Это состояние характеризуется минимумом магнитная энергия в каждом элементе объема. Таким образом, магнитоупругий эффект удовлетворяет условию: EH + Es + Em ® min, где EH, Es, Em - энергия внешнего магнитного поля, механическая энергия деформации и энергия магнитоупругой анизотропии, соответственно.
Данное условие выполняется благодаря смещению границ доменов и повороту их векторов намагниченности: неблагоприятные с энергетической точки зрения зоны уменьшаются, а зоны, имеющие минимальную энергию, увеличиваются. (Незначительные смещения границ доменов обратимы, а сравнительно большие - необратимы).
Основой МДДВ является совмещенный упруго-чувствительный элемент в виде катушки с сердечником (из никеля или пермаллоя).
По принципу преобразования различают МДДВ двух типов: генераторные и параметрические.
 Генераторный МДДВ (рис.4.20) подобен ПДДВ с сегнетоэлектриком. Под действием измеряемого механического напряжения (например, сжатия ds < 0) индукция Bост, наведенная в сердечнике - постоянном магните, изменяется. Величина этого изменения dBост/ds характеризует чувствительность материала и составляет » 1,5 10-9 (Вб м2)/(Н м2).
Генераторный МДДВ (рис.4.20) подобен ПДДВ с сегнетоэлектриком. Под действием измеряемого механического напряжения (например, сжатия ds < 0) индукция Bост, наведенная в сердечнике - постоянном магните, изменяется. Величина этого изменения dBост/ds характеризует чувствительность материала и составляет » 1,5 10-9 (Вб м2)/(Н м2).
В свою очередь, вариации потока индукции наводят в выходной обмотке ЭДС, пропорциональную dBост/dt. Таким образом, функцию преобразования МДДВ можно представить приближенным выражением:
где u - измеряемое напряжение в разомкнутой цепи, K, K+ - коэффициенты, пропорциональные числу витков N катушки и ее сечению.
Генераторные МДДВ наиболее просты и миниатюрны, но работают только в динамическом режиме, поскольку измеряется параметр dF/dt (ds/dt).
Наиболее распространенная схема параметрического МДДВ (рис.4.21) основана на измерении вариаций магнитной проницаемости m под действием механической нагрузки на сердечник. Параметрические МДДВ разделяются на две группы: дроссельные (изменяется индуктивность катушки) и трансформаторные (изменяется взаимная индуктивность).
Во всех случаях справедливо выражение: Dm/m = DRm/Rm= DL/L = Sмs Следовательно, функцию преобразования параметрического МДДВ будет равна:
 Dm/m = Sм s
Dm/m = Sм s
Мерой магнитоупругого эффекта МДДВ является магнитоупругая чувствительность Sм равная:
Sм = Dm/ms.
(Sм = 2 10-9 м2/Н - для железоникелевых сплавов, smax = 8 107 Н/м2 - для пермаллоя).
Недостатком МДДВ является изотропия магнитных свойств, а также зависимость формы магнитного поля от величины нагрузки. Устранение этих недостатков требует увеличения размеров магнитопровода (что приводит к уменьшению краевых эффектов) и ограничения диапазона измеряемых параметров до 50% от номинальных значений. В этом случае, удается обеспечить 1% точность измерений.
Метрологические свойства МДДВ определяются тремя основными факторами: магнитоупругой чувствительностью материала сердечника Sм, уровнем допустимых механических напряжений и частотными характеристиками материала.
Sм определяется допустимым уровнем Dm/m и зависит от химического состава материала, характера термообработки, типа напряженного состояния (растяжение, сжатие, кручение). Максимальные значения Dm/m достигают 40%, при напряжениях 5 ... 8 кг/мм2, что соответствует деформациям ~ 2 10-4 ... 4 10-4 .
Характеристики некоторых моделей МДДВ приведены в табл. 4.6.
Таблица 4.6. Примеры промышленных МДДВ
| Модель | Измеряемый параметр | Диапазон | Измерительный ход, мм | e, % | Размеры, мм | m, кг |
| TD 3 | Сила | 104 ... 107 Н | 0,02 ... 0,05 | 2 | 510´310 | 3,2 |
| TS-V | Скорость | 0 ... 1,5 10 5об/мин | 0,8 |
Примечание. Модель TS-V разработана фирмой Takatiho Seyky, Япония.
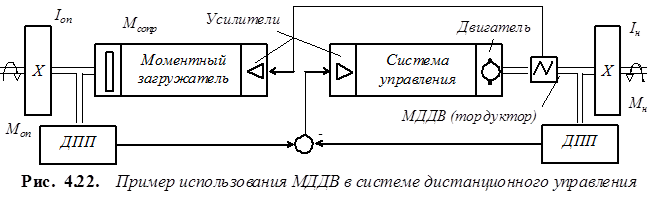
МДДВ нашли довольно широкое применение в специальных областях техники. На рис. 4.22 представлен пример использования МДДВ в качестве датчика момента в системе ДСД с пассивным отражением усилия [ ]. Системы этого типа применяются в дистанционно-управляемых манипуляторах, когда на задающее устройство необходимо передать информацию о силовом взаимодействии исполнительного механизма с объектом работ. Это свойство обеспечивается с помощью обратного канала отражения усилия, который имитирует нагрузки, действующие на исполнительный механизм. В канал отражения усилия входит имитатор нагрузки (загружатель), бесконтактный датчик момента (тордуктор) и усилитель. В данной схеме используется пассивный загружатель, который развивает момент только при приложении нагрузки со стороны оператора. Такая схема существенно упрощает управление манипулятором и не требует постоянного контроля его состояния. В качестве пассивного загружателя чаще всего применяются фрикционные электромагнитные муфты. При отсутствии сигнала управления с тордуктора (при Мн = 0) половинки муфты свободно скользят друг относительно друга, и оператор не ощущает нагрузки. Если же Мн ¹ 0 на тордуктор формирует сигнал на загружатель и возникающий в нем магнитный поток прижимает обе половинки муфты друг к другу. Момент на валу оператора Моп является пассивным, т.е. он не может привести в движение вал оператора. Система ДСД с пассивным отражением усилия позволяет манипулировать тяжелыми объектами, в частности переносить радиоактивные контейнеры в реакторной зоне. Тордуктор с диапазоном измерения 250 ... 7500 Нм конструктивно выполнен в виде трансформатора, с одной первичной обмоткой и несколькими вторичными, образующими дифференциальную схему. На рис. 4.22 обозначено: Iоп и Iн - моменты инерции вращающихся частей кинематической передачи на валу оператора и нагрузки, Мсопр - момент сопротивления. В некоторых случаях, тордуктор устанавливается также и на задающей стороне.
Отметим основные достоинства МДДВ. В первую очередь, это большая выходная мощность, не требующая усилительных каскадов, высокая жесткость и надежность технических решений. Благодаря этому, МДДВ используются в экстремальных условиях (при высокой влажности, давлении и т.д.). К недостаткам МДДВ относятся ограниченная полоса пропускания (вследствие токов Фуко) и невысокая точность.
4.2.3. Электростатические датчики
Электростатические (емкостные) датчики широко используются в кинестетических и локационных системах. В первых они выполняют те же функции, что П- и МДДВ, во вторых используются для обнаружения объектов (например, в охранных системах разного рода). Во всех случаях измеряемым параметром является вариация емкости датчика.
Простейший электростатический ДДВ (ЭСДДВ) представляет собой электромеханический преобразователь, в корпусе которого размещены два (или более) параллельных или концентрических электрода площадью $, разделенных диэлектрическим слоем жесткостью G. Емкость C плоского конденсатора (рис. 4.23б) без учета краевых эффектов (т.е. при d << Ö$) определяется известной зависимостью:
C =e e0 $/d,
где e0 = 8,85 10-12 Ф/м, e - диэлектрическая проницаемость слоя, d - расстояние между электродами.
Для цилиндрического конденсатора (рис. 4.23а) справедливо следующее выражение:
 Здесь Dl - глубина погружения внутреннего цилиндра радиусом rвн во внешний радиуса rвнеш. Как следует из представленных формул, факторами, влияющими на емкость датчика C, являются его геометрические размеры и параметры диэлектрического слоя. При этом, однако, существенно, что указанные факторы должны быть динамическими; для конденсатора характерен эффект стекания заряда, рассмотренный в разд. 4.2.1. Следовательно, к ЭСДДВ применимы те же ограничения, что и к ПДДВ. Преобразователи этого типа работают на переменном токе с несущими частотами от 50 кГц до нескольких МГц.
Здесь Dl - глубина погружения внутреннего цилиндра радиусом rвн во внешний радиуса rвнеш. Как следует из представленных формул, факторами, влияющими на емкость датчика C, являются его геометрические размеры и параметры диэлектрического слоя. При этом, однако, существенно, что указанные факторы должны быть динамическими; для конденсатора характерен эффект стекания заряда, рассмотренный в разд. 4.2.1. Следовательно, к ЭСДДВ применимы те же ограничения, что и к ПДДВ. Преобразователи этого типа работают на переменном токе с несущими частотами от 50 кГц до нескольких МГц.
ЭСДДВ классифицируются по трем основным признакам.
1. По форме: плоские и цилиндрические.
2. По типу диэлектрика: воздушные, керамические и полупроводниковые.
3. По влияющему фактору: ЭСДДВ, в которых изменяется взаимное положение электродов-обкладок и ЭСДДВ с изменяемой диэлектрической проницаемостью.
Емкостные преобразователи с воздушным диэлектриком используются при измерении сил и ускорений, в качестве детекторов близости и т.д. Применение пьезокерамических материалов, диэлектрическая проницаемость которых сильно зависит от напряженности приложенного электрического поля, температуры и гидростатического давления, позволяет строить датчики контроля параметров окружающей среды. Наконец, для ЭСДДВ могут применяться структуры на базе запертых p-n переходов - варикапов, где p и n области играют роль пластин, разделенных обедненным слоем, ширина которого, а, следовательно, и емкость, изменяются под действием приложенного напряжения.
 ЭСДДВ являются обратимыми электромеханическими преобразователями. С электрической стороны они характеризуются: напряжением между пластинами U, зарядом q = C U, током i = dq/dt и энергией Wэ = qU/2 = CU2/2. С механической стороны выделяют: жесткость G, взаимное перемещение электродов x и скорость их перемещения V = dx/dt, под действием силы F, а также силу притяжения электродов fэс = dWэс/dx.
ЭСДДВ являются обратимыми электромеханическими преобразователями. С электрической стороны они характеризуются: напряжением между пластинами U, зарядом q = C U, током i = dq/dt и энергией Wэ = qU/2 = CU2/2. С механической стороны выделяют: жесткость G, взаимное перемещение электродов x и скорость их перемещения V = dx/dt, под действием силы F, а также силу притяжения электродов fэс = dWэс/dx.
Взаимосвязь механической и электрической сторон преобразователя описывается линеаризованными уравнениями вида:
dF = G x + E0 C0 U и dq = E0 C0 x + C0 U.
Эти зависимости даны в предположении, что вариации U и x малы по сравнению с начальными напряжением и зазором и, следовательно, емкость C0 и напряженность поля E0 постоянны. Из приведенных уравнений видна взаимосвязь электрических и механических характеристик ЭСДДВ с коэффициентом электромеханической связи Kэм = E0 C0. В частности, из второго уравнения следует, что ток через преобразователь определяется не только составляющей i1 = dq/dt = C0 (dU/dt), но и не всегда учитываемой составляющей, обусловленной перемещением электродов: i2 = dq/dt = E0 C0 (dx/dt).
ЭСДДВ отличаются простой и весьма надежной конструкцией. В качестве диэлектрического слоя обычно используется воздух. При измерении механических величин ЭСДДВ используются в системах контроля силовых факторов и малых перемещений или деформаций. Режим включения датчика определяется его жесткостью и частотными характеристиками входного воздействия.
Диапазоны измерения ЭСДДВ составляют:
· в режиме измерения малых перемещений не более 1 ... 2 мм;
· в режиме измерения сил 10-2 Н ... 107 Н.
 Функция преобразования емкостного датчика зависит от его конструкции и схемы включения. В частности, для простого цилиндрического ЭСДДВ, зависимость емкости С от перемещения х = Dl строго линейна: С = Кх, где К = 2pe0/lg(rвн/rвнеш). Чувствительность датчика S равна крутизне его характеристики К и постоянна. При использовании плоского ЭСДДВ с изменяемым воздушным зазором, зависимость С от х нелинейна: С = e0 $/(d + х), и S = e0 $/(d + х)2. Очевидно, что чувствительность S тем выше, чем ближе расположены электроды друг к другу. Для увеличения линейности ЭСДДВ используется схема двойного дифференциального конденсатора (рис. 4.24). ЭСДДВ с переменным зазором измеряют перемещения в пределах 0,1 … 1 мм. Существенно больший диапазон измерения имеют датчики с изменяемой площадью обкладок, он достигает 10 и более мм. Однако эта схема обладает меньшей чувствительностью. Так, для одиночного плоского конденсатора со стороной равной а, имеем S2 = e0 а/d и при S1 = e0 а2/d2 получим S2/S1<<1.
Функция преобразования емкостного датчика зависит от его конструкции и схемы включения. В частности, для простого цилиндрического ЭСДДВ, зависимость емкости С от перемещения х = Dl строго линейна: С = Кх, где К = 2pe0/lg(rвн/rвнеш). Чувствительность датчика S равна крутизне его характеристики К и постоянна. При использовании плоского ЭСДДВ с изменяемым воздушным зазором, зависимость С от х нелинейна: С = e0 $/(d + х), и S = e0 $/(d + х)2. Очевидно, что чувствительность S тем выше, чем ближе расположены электроды друг к другу. Для увеличения линейности ЭСДДВ используется схема двойного дифференциального конденсатора (рис. 4.24). ЭСДДВ с переменным зазором измеряют перемещения в пределах 0,1 … 1 мм. Существенно больший диапазон измерения имеют датчики с изменяемой площадью обкладок, он достигает 10 и более мм. Однако эта схема обладает меньшей чувствительностью. Так, для одиночного плоского конденсатора со стороной равной а, имеем S2 = e0 а/d и при S1 = e0 а2/d2 получим S2/S1<<1.
 ЭСДДВ является измерительным устройством второго порядка, и, следовательно, частотно-зависимым прибором. В эквивалентной схеме ЭСДДВ учитываются емкость датчика Cд, его сопротивление изоляции между электродами Rут, сопротивление Rк и индуктивность Lк кабеля, а также паразитная емкость Cп между электродами и заземленными деталями конструкции (рис. 4.25а). Вид эквивалентной схемы определяется режимом работы датчика. Так, при работе на низких частотах активное сопротивление конденсатора Rут велико и влияние индуктивности Lк и сопротивления кабеля Rк (оно называется также сопротивлением ввода) не сказывается. При работе на высоких частотах сопротивление Rут падает и большую роль начинают играть индуктивность и сопротивление ввода. Шунтирующее действие сопротивления утечки перестает сказываться (рис. 4.25б). В этом случае удобнее последовательная эквивалентная схема преобразователя.
ЭСДДВ является измерительным устройством второго порядка, и, следовательно, частотно-зависимым прибором. В эквивалентной схеме ЭСДДВ учитываются емкость датчика Cд, его сопротивление изоляции между электродами Rут, сопротивление Rк и индуктивность Lк кабеля, а также паразитная емкость Cп между электродами и заземленными деталями конструкции (рис. 4.25а). Вид эквивалентной схемы определяется режимом работы датчика. Так, при работе на низких частотах активное сопротивление конденсатора Rут велико и влияние индуктивности Lк и сопротивления кабеля Rк (оно называется также сопротивлением ввода) не сказывается. При работе на высоких частотах сопротивление Rут падает и большую роль начинают играть индуктивность и сопротивление ввода. Шунтирующее действие сопротивления утечки перестает сказываться (рис. 4.25б). В этом случае удобнее последовательная эквивалентная схема преобразователя.
Rэкв = Rк и Сэкв = С0 + Сп.
Влияние сопротивления утечки может быть учтено соответствующей добавкой:
Rэкв = Rк + 1/ (w2 Cэкв2 Rут2)
В эквивалентной схеме ЭСДДВ с керамическим диэлектриком должны быть учтены потери, вызывающие изменение сдвига фаз между напряжением и током, который оказывается меньше p/2 на угол потерьy. В образцовых воздушных конденсаторах tg y не превышает 5 10-5, так как определяется только потерями в изоляции между электродами и в материале электродов.
Для получения достаточно благоприятного соотношения сопротивлений для ЭСДДВ с емкостью 10 … 100 пФ используются несущие частоты выше 100 кГц (вплоть до нескольких мегагерц).
При включении ЭСДДВ в измерительную цепь, наиболее часто используют мост Саути (рис. 4.26) и усилительную схему (рис. 4.27).
 В случае мостовой схемы, если пренебречь паразитными составляющими емкости функция преобразования получит вид:
В случае мостовой схемы, если пренебречь паразитными составляющими емкости функция преобразования получит вид:
Заметим, что это выражение линейно, при включении ЭСДДВ по схеме с изменяемым зазором и по схеме с изменяемой площадью.
При использовании усилительной схемы емкостной датчик может устанавливаться как вместо постоянного конденсатора C1 так и C2. Элементы схемы подбирают так, чтобы, R1 wC1 << 1, и R2 wC2 >> 1. Тогда, в диапазоне частот (1/2p R2 C2) << f << (1/2pR1C1) получим зависимость вида: Uвых = - (C1/C2) Е. Если ЭСДДВ установлен на место C1, то функция преобразования линейна для конденсатора с изменяемой площадью, если на место C2, то для конденсатора с изменяемым зазором.
Следовательно, при использовании ЭСДДВ, например, в качестве датчика силы (DC~ G x ~ DF) и устанавливая его в соответствующее место измерительной схемы, всегда можно получить линейную функцию преобразования.
Погрешности ЭСДДВ определяются, главным образом, стабильностью параметров зазора (его величины и диэлектрической проницаемости e). Поэтому, в конструкциях используют стабильные диэлектрики, а сами датчики тщательно герметизируют. Таким диэлектриком является воздух. (Вариации емкости конденсатора, при изменении температуры на 10оС не превышает 0,002%, а при изменении давления на 10 Н/м2 - 0,06%). Стабильными диэлектриками являются также плавленый кварц и стекло.
Важным параметром работы емкостного ЭСДДВ является уровень допустимого напряжения, определяющий значение напряженности, при которой наступает пробой диэлектрического промежутка. Для воздуха при нормальном давлении и зазорах между пластинами 0,1 ... 10 мм эта напряженность составляет 2 ... 3 кВ/мм. При включении ЭСДДВ в измерительную цепь особое значение имеет согласование реактивных сопротивлений датчика и подводящего кабеля, который, уже при малой длине имеет емкость, сравнимую с емкостью датчика. Это обстоятельство существенно влияет на чувствительность схемы и погрешность измерения. Поэтому, большинство элементов измерительной цепи схемы размещают непосредственно в корпусе датчика.
Рассмотрим пример использования ЭСДДВ в охранных системах. Преобразователи этого типа применяются в схемах детекторов присутствия и приближения, реагирующих на проникновение человека в закрытое помещение или на его прикосновение к замкам, ручкам дверей, сейфам и другим металлическим объектам. Принцип действия заключается в измерении вариаций диэлектрической проницаемости среды емкостным методом.
Простой схемой детектора присутствия [ ] является емкостное реле, с относительно небольшим радиусом действия ~ 0,6... 1,0 м (рис. 4.28). Катушка L намотана на многосекционном полистироловом каркасе и содержит 500 витков (250 + 250) с отводом от середины проводом ПЭЛ 0,12 мм. ЧЭ детектора, представляющий собой отрезок изолированного монтажного провода длиной 15 ... 100 см (или проволочный квадрат со стороной 15 ... 100 мм) устанавливается, во избежание наводок, перпендикулярно печатной плате. В схеме используется отечественная элементная база - переменный конденсатор - КПК-М, остальные К50-6. В качестве реле можно использовать РЭС-10. Настройка производится переменным конденсатором, ротор которого в начальный момент устанавливается в положение минимальной емкости. Чем меньше емкость этого конденсатора, тем чувствительнее схема и выше ее дальность действия.
Подобным образом строятся схемы детектора приближения, реагирующие на изменение емкости между пластинкой-электродом и общим проводом сети. Чувствительность таких схем пропорциональна площади пластин (обычно ее выбирают такой, чтобы можно было бы обнаружить человека на расстоянии ~ 0,5 ... 1,0 м).
Приведем примеры использования ЭДДВ в промышленных задачах (табл. 4.7).
Таблица 4.7. Примеры промышленных ЭСДДВ
| Модель | Измеряемый параметр | Диапазон | To C | e, % | Размеры, мм | m, кг |
| FD-3D | Давление | 0 ... 107 Па | -30 ... +90 | 1 | Æ58´159 | 0,9 |
| AL-102 | Деформация | 0 ... 1 мм | -10 ... +90 | 2 | ||
| LIC-150 | Уровень | 0 ... 200 м | -10 ... +90 | 0,8 | Æ27´110 | 0,3 |
| CGS-H11 | Влажность | 40 ... 100 % | 0 ... 70 | 12´13´0,7 | 0,03 | |
| YMS-110 | Дальность | 0 ... 250 мм | -30 ... +60 | 5 | 70´60´250 | 1,2 |
| VariKont | Положение | 0 … 40 мм | -25 ... +70 | 1 | М20´80 | 0,3 |
Примечание. Модели разработана фирмами Fudzi Denky, Япония, AL, Франция, Fero Ko, Symaleck, Yasima, Япония и Pepperl+Fuchs (Германия).
Как следует из примеров, датчики этого типа способны участвовать в измерении различных параметров, только в табл. 36 их представлено шесть. Подобная многопараметричность является очевидным достоинством ЭСДДВ. К другим достоинствам можно отнести также простоту конструкции, широкий диапазон измерения, помехоустойчивость к магнитным полям и работоспособность до высоких температур.
ЭСДДВ не лишены недостатков. В первую очередь, это необходимость использования высоких несущих частот, обязательное согласование кабеля и чувствительность к загрязнению.
4.2.4. Электромагнитные датчики
 Электромагнитные датчики, как и емкостные используются в робототехнике для решения кинестетических (определения усилий, вибраций, давлений и пр.) и локационных задач, где с их помощью обнаруживают различные металлические объекты (металлоискатели разных видов). В первом случае, конструктивная, а также электрическая схема подобны схемам МДДВ, во втором применяются специальные схемотехнические решения. В большинстве промышленных измерительных систем электромагнитные датчики питаются непосредственно от сети переменного напряжения.
Электромагнитные датчики, как и емкостные используются в робототехнике для решения кинестетических (определения усилий, вибраций, давлений и пр.) и локационных задач, где с их помощью обнаруживают различные металлические объекты (металлоискатели разных видов). В первом случае, конструктивная, а также электрическая схема подобны схемам МДДВ, во втором применяются специальные схемотехнические решения. В большинстве промышленных измерительных систем электромагнитные датчики питаются непосредственно от сети переменного напряжения.
В общем случае, электромагнитный ДДВ (ЭМДДВ) представляет собой один или несколько контуров (обмоток), находящихся в магнитном поле, которое может быть создано как токами, протекающими по контурам, так и внешним источником. Простейший (одноконтурный) датчик характеризуется: индуктивностью L, током через контур i, потокосцеплением Y = Li, противо-ЭДС e = - dY/dt, энергией электромагнитного поля Wм = Yi/2 = Li2/2 и электромагнитной силой fэм. Используя в качестве информативного признака любой из этих параметров, можно построить датчики, измеряющие различные физические величины (тесла- и гальванометры, тахометры и др.). Однако важно отметить, что параметры магнитной цепи являются взаимозависимыми. (Так, например, действие fэм на сердечник преобразователя вызывает его неконтролируемое перемещение, а ток, протекающий по замкнутому контуру, приводит к появлению силы, поворачивающей его относительно поля и изменяющей, тем самым, величину индуцируемой ЭДС).
В ДДВ обычно используется вариации магнитной проницаемости m, вызывающие изменение индуктивности или взаимной индуктивности M катушек. Существенной особенностью таких датчиков является наличие потоков рассеяния, обусловленное тем, что часть основного магнитного потока Ф замыкается не через все витки катушки (рис. 4.29). Соответственно полная индуктивность контура имеет две составляющие: основную индуктивность L и индуктивность рассеяния Lрас равные: L = n2/Zм, Lрас = n/Zм', где Zм и Zм' - магнитные сопротивления основного потока и потока рассеяния, n - число витков обмоток. Для уменьшения потерь в обмотку преобразователя вводится ферромагнитный сердечник, концентрирующий магнитный поток, и уменьшающий, тем самым, долю потока рассеяния в общем потоке. Наименьшую индуктивность рассеяния имеет обмотка, выполненная на тороидальном сердечнике. Наличие сердечника позволяет строить уже рассмотренные схемы ЭДП (разд. 3.1.2), а также ЭМДДВ малой жесткости, основанные на измерении вариаций индуктивности L при изменении положения сердечника. (В то же время, использование сердечников приводит к появлению частотно-зависимых потерь мощности на перемагничивание магнитопровода).
ЭМДДВ можно классифицировать по трем признакам.
1. По типу контролируемого параметра: индуктивные (изменяется L) и трансформаторные (изменяется M).
2. По характеру изменения магнитного зазора: с изменяемой площадью и с изменяемой длиной зазора.
3. По степени симметрии конструктивной схемы: простые (дроссельные) и разностные (дифференциальные).
 На практике наиболее распространены разностные индуктивные ЭМДДВ, обладающие большей точностью, по сравнению с трансформаторными, но требующие использования усилительных схем. (Несимметричные конструкции используются реже и в специальных случаях).
На практике наиболее распространены разностные индуктивные ЭМДДВ, обладающие большей точностью, по сравнению с трансформаторными, но требующие использования усилительных схем. (Несимметричные конструкции используются реже и в специальных случаях).
Конструктивные схемы ЭМДДВ подобны схемам ЭСДДВ (рис. 4.30). Обмотки катушек выполняются из медной проволоки и требуют высокой равномерности намотки. Ферромагнитные детали (якорь, детали магнитопроводов) в большинстве случаев изготавливаются сплошными. В качестве упругих элементов используются:
· мембраны (для усилий ~ 0,01 ... 0,1 МН);
· торцевые кольца (для усилий ~ 100 Н ... 1 МН);
· балки (для усилий ~ 0,1 ... 10 МН).
Функция преобразования ЭМДДВ существенно нелинейна и ее точный расчет практически невозможен. Приблизительная аналитическая зависимость получена для дроссельного ЭМДДВ с изменяемой длиной зазора:
L = L0/(1+kx) » L0 (1+kx-k2x2),
где начальная индуктивность L0 и постоянная k определяются геометрическими размерами датчика и магнитной проницаемостью цепи.
В симметричной конструкции (при использовании дифференциальной схемы) линейность увеличивается за счет компенсации членов при четных степенях. Погрешность линейности уменьшается до ~ 0,2%, а функция преобразования апроксимируется выражением: L = L0 (1+k*x).
Эквивалентная электрическая схема ЭМДДВ, как и любого частотно-зависимого преобразователя учитывает вклад отдельных элементов конструкции, зависящий от рабочей частоты прибора. В представленной на рис. 4.31 эквивалентной электрической схеме дроссельного ЭМДДВ с ферромагнитным сердечником символами Lд и Rд обозначены индуктивность и сопротивление обмотки. При работе датчика на частотах 103 ... 104 Гц необходимо также учесть сопротивление потерь мощности на перемагничивание Rп и межвитковую емкость C, а также характерные для индуктивных преобразователей источники ЭДС e и Uш. Здесь Uш - напряжение шума, обусловленное эффектом Баркгаузена. Этот эффект, особенно заметный в высокочувствительных приборах (например, феррозондах) связан со скачкообразными смещениями доменных границ при перемагничивании ферромагнетика. Он вызывает импульсы ЭДС eБ в области средних частот, eБ = DФ/t , где DФ - приращение магнитного потока, вызванное скачком Баркгаузена, t - длительность скачка. Длительность этих скачков для разных материалов составляет 10-3... 10-7с. Что касается ЭДС e, индуцируемой в контуре, то она может быть как информативной, так и помехой. Использование сердечников с высокой магнитной проницаемостью и высоким удельным сопротивлением (например, ферритов) позволяет практически устранить потери из-за Lрас и токов Фуко.
Как следует из рис. 4.31 при разработке ЭМДДВ приходится учитывать значительное количество источников погрешностей. Для их частичной компенсации применяется ряд мер. Так, для уменьшения паразитной составляющей ЭДС e датчик экранируются от внешнего магнитного поля, а соединительные провода подводятся таким образом, чтобы не образовывать дополнительных контуров. Кроме того, в датчике используются симметричные магнитные цепи и обмотки (например, тороидальные). Суть симметричной обмотки заключается в том, что для каждого витка на сердечнике имеется симметрично расположенный, по отношению к магнитному потоку, прони зывающему сердечник, «парный» виток. ЭДС, наводимые в «парных» витках, компенсируют друг друга, и суммарная ЭДС уменьшается. Еще одним способом повышения точности является ограничение частотной характеристики. Верхняя частотная граница ЭМДДВ определяется длительностью скачков Баркгаузена и составляет 102 ... 105 Гц, для ферритов до 107 Гц. Нижняя граница зависит от частоты перемагничивания f0 и составляет не менее 3 f0.
зывающему сердечник, «парный» виток. ЭДС, наводимые в «парных» витках, компенсируют друг друга, и суммарная ЭДС уменьшается. Еще одним способом повышения точности является ограничение частотной характеристики. Верхняя частотная граница ЭМДДВ определяется длительностью скачков Баркгаузена и составляет 102 ... 105 Гц, для ферритов до 107 Гц. Нижняя граница зависит от частоты перемагничивания f0 и составляет не менее 3 f0.
В табл. 4.8 приведены характеристики различных моделей ЭМДДВ. Эти датчики, как и в случае ЭСДДВ также являются многопараметрическими.
Таблица 4.8. Примеры промышленных ЭМДДВ
| Модель | Измеряемый параметр | Диапазон, мм | To C | e, % | Размеры, мм | m, кг |
| ПЛИ 063 | Перемещение (со штоком) | 0 ... 700 | 0,3 | 41´41´55 | 0,5 | |
| BES-150 | Дальность | 0,5 ... 150 | 1 | Æ33´76 | 0,27 | |
| AMS-1B | Глубина | 0 ... 80 | 0,03 | |||
| NBB5 | Положение | 0 ... 25 | -25 … +70 | 1 | М20´80 | 0,3 |
| RC15 | Скорость | до 10 м/с | -25 … +70 | 1 | 15´41´65 | 0,4 |
Примечание. Модель BES-150 разработана фирмой Balluff, NBB5 и RC15 - Pepperl+Fuchs (Германия).
Существенной особенностью трансформаторных дифференциальных ЭМДДВ, является высокий уровень выходного сигнала, не требующий применения усилителей. Пример такой схемы представлен на рис. 4.32. Датчик обладает погрешностью e ~ 0,5%, при угле кручения 0,250 и диапазоне измерения моментов 0 ... 200 Нм. Чувствительность составляет ~ 18 мкВ/В/м. Питание осуществляется от генератора переменного тока напряжением U = 10 В с частотой не менее 10 кГц. Наличие муфтового соединения позволяет использовать датчик для измерения моментов M на быстровращающихся валах. Скорость вращения может достигать 20000 оборотов в минуту. С точностью до указанного значения погрешности, функция преобразования моментометра апроксимируется приблизительной зависимостью: Uвых » U M.
По своим эксплуатационным характеристикам ЭМДДВ во многом подобны ЭСДДВ. Достоинствами этих датчиков являются: простота конструкции и эксплуатации (питание от промышленной сети переменного тока 50 или 400 Гц) и, как следствие низкая стоимость, температурная стабильность, а также высокий уровень и мощность выходного сигнала. Недостатками ЭМДДВ является невысокая линейность и низкая, по сравнению с МДДВ, жесткость (измерительный ход - 0,1 ... 0,6 мм).
В заключение этой главы приведем результаты сравнительного анализа различных типов ДДВ (табл. 4.9). Как следует из табл. 39 все датчики имеют примерно одинаковую ширину диапазона измерения и отличаются только граничными значениями. Что касается точности, то лучшими показателями обладают ПДДВ.
Таблица 4.9. Сравнительная характеристика ДДВ
| Тип преобразователя | Диапазон измерения, Н | Погрешность, % | ||
| 10-2 ... 102 | 102 ... 106 | 106 ... 1010 | ||
|
| 0,05 ...0,1 | |||
|
| 0,1 ... 0,5 | |||
| Рекомендуем посмотреть лекцию "17 Определение размера площади цеха".
| 0,5 ... 2,0 | |||
|
| 0,5 ... 2,0 |
 ПДДВ
ПДДВ МДДВ
МДДВ
Вопросы для самостоятельной подготовки
- Зависит ли частота выходного напряжения асинхронного тахогенератора от скорости вращения?
- Какова размерность магнитодвижущей силы?
- От каких параметров зависит мультипликативная погрешность тахогенератора постоянного тока?
- Можно ли в конструкции тахогенератора постоянного тока исключить щеточный узел?
- Какой тип пьезоэффекта используется в пьезогенераторах?
- Какой датчик обладает большей линейностью - электромагнитный или емкостной?
- Какой тип датчиков динамических величин наиболее чувствителен к условиям внешней среды?
- Для каких датчиков характерна большая выходная мощность - пьезоэлектрических или магнитострикционных?
- Можно ли использовать пьезодатчики для измерения статических усилий?
- Зависит ли вид эквивалентной схемы датчика от частотного диапазона?
















