
Уравнение силового баланса
Лекция 8. Уравнение силового баланса
План лекции
8.1. Силовой баланс автомобиля
8.2. Силовой баланс автомобиля при различной нагрузке
8.3. Динамические факторы автомобиля
8.4. Динамическая характеристика автомобиля
8.5. Динамический паспорт автомобиля
8.1. Силовой баланс автомобиля
Представим уравнение движения автомобиля в следующем виде:
РТ = РД + РВ+РИ. (8. 1)
Рекомендуемые материалы
В такой форме оно называется уравнением силового баланса автомобиля и выражает соотношение между тяговой силой на ведущих колесах и силами сопротивления движению.
На основании уравнения (8. 1) строится график силового баланса, позволяющий оценивать тягово-скоростные свойства автомобиля.
При построении графика силового баланса (рис. 8.1) сначала строят тяговую характеристику автомобиля. Затем наносят зависимость силы сопротивления дороги от скорости. Если коэффициент сопротивления дороги — постоянная величина, то указанная зависимость представляет собой прямую линию, параллельную оси абсцисс, а при непостоянном коэффициенте сопротивления дороги — кривую параболической формы. После этого от кривой, характеризующей силу сопротивления дороги, откладывают вверх значения силы сопротивления воздуха при различных скоростях движения. Полученная зависимость называется графиком силового баланса автомобиля.
Кривая суммарного сопротивления дороги и воздуха РД + РВ определяет тяговую силу РТ, необходимую для движения автомобиля с постоянной скоростью. При любой скорости движения отрезок Р3, заключенный между кривыми РТ (на рис. 8.1 — РтШ) и РД + РВ, характеризует запас силы по тяге. Он может быть использован при данной скорости для разгона, преодоления дополнительного дорожного сопротивления (например, подъема) или перевозки дополнительного груза (буксировка прицепа). При одной и той же скорости движения запас силы по тяге на низших передачах больше, чем на высших. Следовательно, при увеличении передаточного числа трансмиссии запас силы по тяге возрастает. Именно поэтому движение в тяжелых дорожных условиях осуществляется на низших передачах.
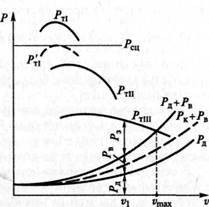
Рис. 8.1. График силового баланса автомобиля:
•PTI, РТII, РТIII — тяговые силы на I, II, III передачах, PTI — тяговая сила на I передаче при уменьшенной подаче топлива; v1, — одно из возможных значений скорости автомобиля
С помощью графика силового баланса можно решать различные задачи, связанные с изучением тягово-скоростных свойств автомобиля. Рассмотрим некоторые из этих задач.
Определение максимальной скорости. Максимальная скорость vmax движения автомобиля определяется точкой пересечения кривой тяговой силы РТ на высшей передаче и суммарной кривой сил сопротивления РД + РВ. В этой точке запас силы по тяге и ускорение автомобиля j равны нулю. Скорость его движения максимальна, так как ее дальнейшее увеличение невозможно.
Определение максимальной силы сопротивления дороги.
Максимальная сила сопротивления дороги, которую преодолевает автомобиль, двигаясь равномерно с любой скоростью, определяется как разность тяговой силы и силы сопротивления воздуха:

Определение максимального преодолеваемого подъема.
Для нахождения максимального подъема, который может преодолеть автомобиль при заданной постоянной скорости на любой передаче, необходимо нанести на график суммарную кривую сил сопротивления качению и воздуха РK + РВ и определить максимальную силу сопротивления подъему:

Зная эту силу, можно найти максимальный угол подъема αmах.
Определение ускорения движения. Для нахождения ускорения, которое может развить автомобиль на заданной дороге при любой скорости, нужно определить силу сопротивления разгону:
Зная значение этой силы, можно найти ускорение, которое способен развить автомобиль при выбранной скорости движения на заданной дороге.
Определение возможности буксования ведущих колес. С этой целью находят силу сцепления Рсц колес с дорогой при известном коэффициенте сцепления <φх. Значение силы сцепления откладывают на оси ординат и на этом уровне проводят горизонталь.
В области, расположенной над проведенной прямой, Рсц < Рт, следовательно, трогание автомобиля с места на I передаче невозможно, а при движении неизбежна остановка.
В области, находящейся под данной прямой, выполняется условие Рсц > РТ. Следовательно, при полной нагрузке двигателя (при полной подаче топлива) безостановочное движение автомобиля без пробуксовки ведущих колес невозможно лишь на I передаче. Для движения без буксования ведущих колес на I передаче необходимо уменьшить подачу топлива и, следовательно, тяговую силу на ведущих колесах (см. кривую Р'T1 на рис. 8.1).
8.2. Силовой баланс автомобиля при различной нагрузке
Практическое применение рассмотренного выше силового баланса автомобиля затруднительно, так как для определения показателей тягово-скоростных свойств необходимо построить отдельные графики для разных значений нагрузки на автомобиль. Это связано с тем, что при изменении нагрузки сила сопротивления дороги РД и суммарная сила сопротивления дороги и воздуха РД + РВв изменяются и для их вычисления требуются дополнительные затраты времени.
Более универсальным является рассмотренный ниже метод силового баланса автомобиля при различной нагрузке. В этом случае строится только один график силового баланса для всех эксплуатационных нагрузок автомобиля.
В основу метода силового баланса автомобиля при различной нагрузке положено уравнение его движения (8.20), представленное в следующем виде:
или
где  — свободная тяговая сила.
— свободная тяговая сила.
Безостановочное движение автомобиля возможно при выполнении условия автомобиль движется без буксования ведущих колес в том случае, если
автомобиль движется без буксования ведущих колес в том случае, если
Для оценки тягово-скоростных свойств при различной нагрузке на автомобиль строится график его силового баланса (рис. 8.2).
Методика построения графика силового баланса такова:
• строят тяговую характеристику автомобиля 
• на график тяговой характеристики наносят кривые свободной тяговой силы Рсв для различных передач;
• слева от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сопротивления дороги ψ. С этой целью ось абсцисс продолжают влево и на нее в произвольном масштабе наносят шкалу коэффициента сопротивления дороги ψ;
• справа от графика тяговой характеристики автомобиля строят вспомогательный график для определения коэффициента сцепления колес с дорогой φх. Для этого ось абсцисс продолжают вправо и на нее в произвольном масштабе наносят шкалу коэффициента сцепления φх;
• из начала координат вспомогательных графиков проводят лучи, соответствующие различным значениям нагрузки на автомобиль.
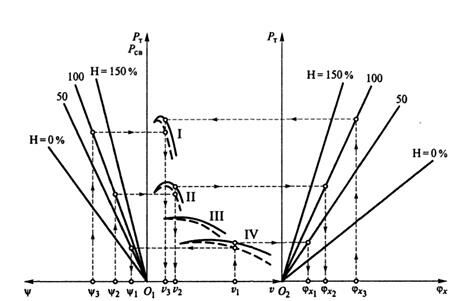
Рис. 8.2. График силового баланса автомобиля при различной
нагрузке:
I — IV — передачи; O1 — начало координат левого и центрального графиков; О2 — начало координат правого графика; ψ1— ψ3, ψx1 ,— ψ хз — значения коэффициентов сопротивления и продольного сцепления различных дорог; vt — v3 — значения скорости автомобиля;----------тяговая сила РТ;----------свободная тяговая сила РСВ
Для определения углов наклона лучей нагрузки на левом вспомогательном графике задают какое-либо значение свободной тяговой силы Рсв, откладывают это значение на оси ординат и проводят горизонтальную прямую. Затем по формуле

находят значения коэффициента у для разных нагрузок (Н = 0 % при G = G0;
Н = 100 % при G = G а и т.д., где G — вес автомобиля при заданной нагрузке Н, представляющей собой долю груза, %, который может быть перевезен на данном автомобиле; G0 — вес снаряженного (порожнего) автомобиля; Gа, — вес автомобиля при полной нагрузке). Из точек, соответствующих найденным значениям коэффициента у, проводят вертикали до пересечения с горизонтальной линией, проходящей через точку, отвечающую выбранному значению свободной тяговой силы Рсв. Полученные точки пересечения соединяют с началом координат левого вспомогательного графика и у каждого луча указывают соответствующее значение нагрузки на автомобиль, % или пасс.
Для определения углов наклона лучей нагрузки на автомобиль на правом вспомогательном графике задают какое-либо значение тяговой силы РТ, откладывают это значение на оси ординат и проводят горизонтальную линию. Затем по формуле

находят значения коэффициента сцепления для разных нагрузок (Н = 0 % при < G 02; Н = 100 % при Ga2 и т.д., где G2 — вес, приходящийся на задние (ведущие) колеса автомобиля при заданной нагрузке; G02 и Gа2 — вес, приходящийся на ведущие колеса соответственно снаряженного автомобиля и автомобиля при полной нагрузке).
Вес автомобиля призаданной нагрузке
где Gгp — полезная нагрузка на автомобиль, Н (грузовые автомобили) или пасс, (легковые автомобили, автобусы). Вес на ведущие колеса при заданной нагрузке
где G02 и Ga2 — вес приходящийся на ведущие колеса соответственно снаряженного автомобиля и с полной нагрузкой, Н.
Через точки, соответствующие найденным значениям коэффициента сцепления φх при разных нагрузках на автомобиль и ведущие колеса, проводят вертикальные линии до пересечения с горизонталью, которая проходит через точку, отвечающую выбранному значению тяговой силы РТ. Полученные точки пересечения соединяют с началом координат правого вспомогательного графика и у соответствующих лучей указывают значения нагрузки на автомобиль, % или пасс. При расчете нагрузок используют значения G02 и Ga2 из технической характеристики автомобиля.
С помощью графика силового баланса автомобиля при различной нагрузке можно решить ряд задач по анализу и оценке тягово-скоростных свойств автомобиля. При этом из четырех параметров (скорость автомобиля v, нагрузка на автомобиль Н, коэффициент сопротивления дороги ψ и коэффициент сцепления колес с дорогой φх) можно определить два любых параметра по двум другим заданным. При этом найденные значения коэффициента сопротивления дороги ψ являются максимально возможными, а значения коэффициента сцепления φх — минимально необходимыми для движения автомобиля при различных нагрузках.
Метод силового баланса удобен для анализа тягово-скоростных свойств конкретного автомобиля. Сравнивать же разные автомобили этим методом затруднительно, так как значения тяговой силы у них могут отличаться в несколько раз, да и масса их также неодинакова.
Поэтому для сравнительной оценки тягово-скоростных свойств разных автомобилей удобнее пользоваться их динамическими факторами и динамическими характеристиками.
8.3. Динамические факторы автомобиля
У автомобиля различают динамический фактор по тяге и динамический фактор по сцеплению. Это безразмерные величины, выражаемые в долях единицы или процентах.
Динамическим фактором по тяге называется отношение разности тяговой силы и силы сопротивления воздуха к весу автомобиля:

Значения динамического фактора по тяге позволяют судить о тягово-скоростных свойствах конкретного автомобиля при разных нагрузках и сравнивать тягово-скоростные свойства различных автомобилей. При этом чем больше динамический фактор по тяге, тем лучше тягово-скоростные свойства и выше проходимость автомобиля: он способен развивать большие ускорения, преодолевать более крутые подъемы и буксировать прицепы большей массы.
Максимальные значения динамического фактора по тяге составляют 0,3...0,45 для автомобилей ограниченной проходимости и 0,6...0,8 — для автомобилей высокой проходимости.
Динамический фактор по тяге часто называют просто динамическим фактором.
Его значение ограничено вследствие наличия сцепления колес с дорогой. Для безостановочного движения автомобиля без пробуксовки ведущих колес необходимо выполнение следующего условия:

где D.сц — динамический фактор по сцеплению.
Динамическим фактором по сцеплению называется отношение разности силы сцепления и силы сопротивления воздуха к весу автомобиля:
Так как буксование ведущих колес обычно происходит при малой скорости движения и большой тяговой силе, то влиянием силы сопротивления воздуха можно пренебречь. Тогда динамический фактор по сцеплению
где G2 — вес, приходящийся на ведущие колеса.
Для установления связи между динамическим фактором и условиями движения представим уравнение движения автомобиля в следующем виде:
или
Разделив обе части последнего уравнения на вес G, получим уравнение силового баланса автомобиля в безразмерной форме:
 (8.2)
(8.2)
При равномерном движении ускорение равно нулю. Тогда

8.4. Динамическая характеристика автомобиля
Динамической характеристикой автомобиля называется зависимость динамического фактора по тяге от скорости на различных передачах. Динамическая характеристика, представленная на рис. 8.3, свидетельствует о том, что динамический фактор по тяге на низших передачах имеет большую величину, чем на высших. Это связано с тем, что на низших передачах тяговая сила увеличивается, а сила сопротивления воздуха уменьшается.
Поскольку при равномерном движении D = ψ, ордината каждой точки кривых динамического фактора, приведенных на динамической характеристике, определяет значение коэффициента сопротивления дороги ψ.
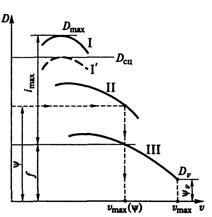
Рис. 8.3. Динамическая характеристика автомобиля:
I—III — передачи; I'—I передача при уменьшенной подаче топлива; vmax — максимальная скорость автомобиля; v max(ψ)— максимальная скорость автомобиля для конкретных дорожных условий
Так, например, точка Dv, соответствующая значению динамического фактора при максимальной скорости vmах, определяет коэффициент сопротивления дороги ψv, которое может преодолеть автомобиль при этой скорости, а ординаты точек максимума кривых динамического фактора представляют собой максимальные значения коэффициента сопротивления дороги, преодолеваемого на каждой передаче.
С помощью динамической характеристики можно решать различные задачи по определению тягово-скоростных свойств автомобиля. Рассмотрим некоторые из этих задач.
Определение максимальной скорости движения автомобиля при заданном коэффициенте сопротивления дороги у. На оси ординат откладываем значение коэффициента сопротивления дороги ψ, характеризующее данную дорогу, и проводим прямую, параллельную оси абсцисс, до пересечения с кривой динамического фактора D. Точка пересечения и будет соответствовать максимальной скорости, которую может развить автомобиль при заданном коэффициенте сопротивления дороги ψ.
Определение максимального подъема, преодолеваемого на дороге с заданным коэффициентом сопротивления качению f Для нахождения максимального подъема, который может преодолеть автомобиль при постоянной скорости на любой передаче на дороге с коэффициентом сопротивления качению f на оси ординат откладываем значение коэффициента f и проводим прямую, параллельную оси абсцисс. Разность между максимальным значением динамического фактора Dmax на любой передаче и значением коэффициента f соответствует максимальному подъему, преодолеваемому на выбранной передаче:
Определение максимального ускорения автомобиля при заданном коэффициенте сопротивления дороги у. Для нахождения максимального ускорения jmax, которое может развить автомобиль на любой передаче, необходимо найти разность между максимальным значением динамического фактора на выбранной передаче и
значением коэффициента сопротивления дороги (Dmax - ψ). Зная эту разность, можно определить значение максимального ускорения по формуле (8. 2)
Определение возможности буксования ведущих колес. При решении данной задачи необходимо сопоставить динамические факторы по тяге и сцеплению. С этой целью определяют значение динамического фактора по сцеплению для заданного коэффициента сцепления φх. Найденное значение откладывают на оси ординат и проводят горизонтальную прямую.
В области, расположенной над проведенной прямой, Dcц < D, следовательно, трогание автомобиля с места на I передаче невозможно, а при его движении неизбежна остановка.
В области, находящейся под этой прямой, выполняется условие Dcц < D, следовательно, при полной нагрузке двигателя, или при полной подаче топлива, движение без пробуксовки ведущих колес невозможно лишь на I передаче. Для движения без буксования ведущих колес на I передаче необходимо уменьшить подачу топлива и динамический фактор по тяге (см. кривую I' на рис. 8.3).
При определении тягово-скоростных свойств динамическая характеристика строится для автомобиля с полной нагрузкой.
8.5. Динамический паспорт автомобиля
Неудобство использования динамической характеристики автомобиля состоит в том, что для оценки тягово-скоростных свойств необходимо строить отдельные графики для каждого значения нагрузки на автомобиль.
Более универсальным и удобным является динамический паспорт автомобиля (рис. 8.4), который позволяет оценить тягово-скоростные свойства при различных нагрузках на автомобиль.
Динамическим паспортом автомобиля называется его динамическая характеристика с номограммой нагрузок и графиком контроля буксования.
Методика построения динамического паспорта автомобиля такова:
. строят динамическую характеристику автомобиля с полной нагрузкой;
• строят номограмму нагрузок, характеризующую изменение динамического фактора по тяге D в зависимости от нагрузки на автомобиль;
. строят график контроля буксования. Он включает в себя зависимости динамического фактора по сцеплению Dcц от нагрузки на автомобиль при разных значениях коэффициента сцепления колес с дорогой φх.
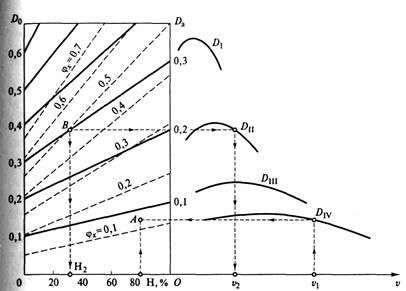
Рис. 8.4. Динамический паспорт автомобиля:
О — начало координат динамической характеристики; 0 — начало координат графика контроля буксования; А, В — характерные точки построения; DI,— DIV — динамический фактор по тяге на I—IV передачах; Н2 — искомая нагрузка; v1 v2 — значения скорости автомобиля;_______динамический фактор по тяге при разных нагрузках;----------динамический фактор по сцеплению при разных коэффициентах продольного сцепления
При построении номограммы нагрузок на автомобиль ось абсцисс его динамической характеристики продолжают влево и на ней в произвольном масштабе откладывают значения нагрузки на автомобиль, % (для грузовых автомобилей) или пасс, (для легковых автомобилей и автобусов). Из точки, соответствующей нулевой нагрузке, проводят вертикаль, на которой откладывают значения динамического фактора по тяге D0 для снаряженного автомобиля (без груза или без пассажиров) в масштабе, определяемом по формуле — динамический фактор по тяге для автомобиля с полной нагрузкой;
— динамический фактор по тяге для автомобиля с полной нагрузкой; — вес соответственно снаряженного автомобиля и автомобиля с полной нагрузкой.
— вес соответственно снаряженного автомобиля и автомобиля с полной нагрузкой.
Затем сплошными линиями соединяют одинаковые значения динамических факторов на осях ординат снаряженного и полностью груженого автомобилей.
на осях ординат снаряженного и полностью груженого автомобилей.
График контроля буксования строят на номограмме нагрузок автомобиля. С помощью этого графика сопоставляют динамические факторы по тяге D и сцеплению D.cц с целью определения возможности буксования ведущих колес при различных нагрузках на автомобиль.
Лекция "15 Свойства вероятности" также может быть Вам полезна.
Для построения графика контроля буксования сначала рассчитывают динамические факторы по сцеплению при разных нагрузках на автомобиль. При этом используют следующие выражения:
 (8.3)
(8.3)
где D0cц и Dаcц — динамические факторы по сцеплению соответственно снаряженного автомобиля и автомобиля с полной нагрузкой; — вес соответственно снаряженного и полностью груженого автомобилей;
— вес соответственно снаряженного и полностью груженого автомобилей; — вес, приходящийся на ведущие колеса соответственно снаряженного и полностью груженого автомобилей;
— вес, приходящийся на ведущие колеса соответственно снаряженного и полностью груженого автомобилей;
φх — коэффициент продольного сцепления (φх = 0,1...0,8).
Последовательно подставляя значения коэффициента сцепления φх в выражения (8.3), определяют динамические факторы по сцеплению D0cц и Dаcц Найденные значения динамических факторов по сцеплению откладывают на вертикалях D0 и Dа номограммы нагрузок в том же масштабе, что и динамические факторы по тяге, и их одинаковые значения соединяют штриховыми линиями, над которыми указывают соответствующие значения φх.
При решении задач по оценке тягово-скоростных свойств автомобиля из четырех параметров — скорости автомобиля v, нагрузки на автомобиль Н, коэффициентов сопротивления дороги ψ и сцепления колес с дорогой φх — можно определить два любых параметра по двум другим заданным. При этом найденные значения коэффициента сопротивления дороги ψ будут максимально возможными, а значения коэффициента сцепления φх — минимально необходимыми для движения автомобиля при различных нагрузках.



















