
Двигатель как объект управления и регулирования
1. Двигатель как объект управления и регулирования
1.1 Общие сведения об автоматическом регулировании и управлении
Работу любого двигателя внутреннего сгорания необходимо контролировать. Поэтому двигатель снабжается различного рода устройствами автоматического регулирования, управления, пуска, останова и др. Многие из них работают в режиме автоматического поддержания заданных значений отдельных регулируемых параметров (частоты вращения, температуры охлаждающей воды, давления наддува и др.). Другие - обеспечивают автоматическое управление работой узлов двигателя (системы автоматизации пуска и остановки, контроля и защиты, а также системы автоматизации агрегатов обслуживания, электронное управление впрыском топлива). Такие устройства необходимо проектировать, конструировать, испытывать, и это справедливо не только для ДВС, но практически для всех технических систем. Поэтому с течением времени была сформирована инженерно-техническая дисциплина «Теория автоматического регулирования и управления», некоторые фрагменты которой (применительно к двигателям внутреннего сгорания) представлены ниже.
В самом простом варианте системы автоматизации между собой взаимодействуют, по крайней мере, два элемента. Одним из них является сам двигатель как объект автоматического регулирования или управления, другим - устройство, обеспечивающее такую автоматизацию. Если это устройство предназначено для поддержания на заданном уровне значения регулируемого параметра, то такое устройство называется автоматическим регулятором, а совокупность двигателя и автоматического регулятора - системой автоматического регулирования (САР).
Совокупность двигателя, как объекта автоматического управления, с прибором или комплексом приборов, осуществляющих процесс автоматизации управления, называется системой автоматического управления (САУ).
Обычно для решения задач управления и регулирования двигателя не рассматривается его внутренняя структура, но необходимо четко определять, что является его входными параметрами и выходными характеристиками. Тогда взаимодействие элементов в системах автоматического регулирования и управления наглядно иллюстрируются функциональными схемами, в которых каждый элемент изображается прямоугольником, а взаимодействие элементов показывается стрелками.
 |
 |
Рекомендуемые материалы
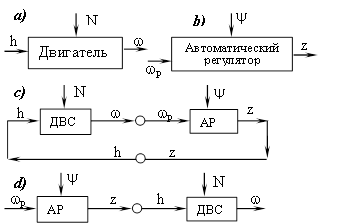
Рис.1.1. Функциональные схемы: а) двигателя; b) регулятора c) системы регулирования d) системы управления
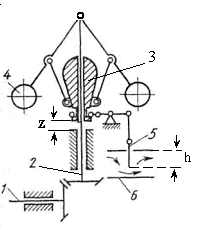
Рис.1.2. Схема автоматического регулятора Уатта. 1- вал машины; 2- валик регулятора; 3- муфта; 4- грузы; 5- заслонка; 6- патрубок
Так, например, двигатель внутреннего сгорания (рис. 1.1,а) может работать на заданном скоростном режиме (ω = const) при заданной нагрузке (настройке потребителя N = const) при условии определенной цикловой подачи топлива gц и, следовательно, при определенном положении h органа управления (рейки, дроссельной заслонки). Для поддержания регулируемого параметра ω на заданном уровне при смене нагрузки необходимо воздействовать на орган управления с целью изменения gц.
Для решения этой задачи используется автоматический регулятор, воспринимающий воздействие со стороны двигателя в виде изменения угловой скорости ωр валика 1 (см. рис. 1.1,b; и 1.2). Следовательно, для двигателя ωр - выходная координата (стрелка от двигателя, см. рис. 1.1,а), а для автоматического регулятора ωр - входная координата (рис. 1.1,b). Значение ωр определяет положение z муфты 3 и положение h органа управления 5 двигателем (см. рис. 1.1,b и 1.2). Таким образом, положение z муфты - выходная координата регулятора. Во многих случаях регулятор дает возможность устанавливать желаемый скоростной режим или изменять его путем смены настройки ψ регулятора, поэтому ψ также является внешним воздействием - входной координатой регулятора (см. рис. 1.1,b).
Используя функциональные схемы элементов можно составить функциональную схему САР, в которой выходное воздействие одного элемента является входным для другого элемента так, что вся цепь взаимодействия замкнута (Рис. 1.1,c). Это замыкание в САР должно осуществляться таким образом, чтобы автоматический регулятор АР воздействовал на двигатель ДВС в направлении восстановления нарушенного режима работы. Так, например, при увеличении ω цикловая подача топлива должна уменьшаться, а при уменьшении ω – увеличиваться. Такое взаимодействие двигателя и регулятора в САР обеспечивается главной отрицательной обратной связью. Положение z муфты автоматического регулятора (Рис. 1.2) кинематически жестко связано с положением h органа управления, например по формуле:
h = h0 – uz z (1.1)
где uz – передаточное отношение; h0 – начальное положение рейки обеспечивающее максимальную подачу топлива. Знак «─» свидетельствует о наличии отрицательной обратной связи.
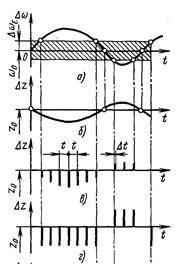 |
Рис. 1.3 Виды регулирующих воздействий: а) отклонение регулируемого параметра; б) непрерывное воздействие регулятора; в) прерывистое (импульсное) воздействие с амплитудой, пропорциональной отклонению регулируемого параметра; г) прерывистое (импульсное) с постоянной амплитудой.
Основным отличием системы управления от системы регулирования является отсутствие в простейшей САУ общей замкнутой цепи взаимодействия элементов (Рис. 1.1, d). В замкнутых системах воздействие регулятора на двигатель зависит от результата воздействия. В разомкнутых системах такой зависимости нет.
По характеру взаимодействия элементов САР и САУ подразделяются на системы непрерывного и прерывистого действия. При непрерывном регулировании отклонение, например, угловой скорости коленчатого вала двигателя на ∆ω от ее стационарного значения ωо (рис 1.3,а) вызывает непрерывное воздействие на объект через соответствующее отклонение ∆z выходной координаты регулятора (рис. 1.3,б) от ее стационарного значения zо.
При прерывистом регулировании (рис. 1.3,в) отклонение параметра измеряется непрерывно, а воздействие на объект осуществляется прерывисто (через некоторые интервалы времени t импульсами длительностью ∆t). Причем амплитуда импульса может быть как пропорциональной отклонению регулируемого параметра (рис. 1.3,в), так и постоянной (см. рис. 1.3, г).
Функциональные схемы ДВС
Современный двигатель внутреннего сгорания (ДВС) представляет собой совокупность взаимодействующих элементов (рис. 1.4), к числу которых относится потребитель 8, собственно двигатель 7, содержащий блок с камерами сгорания, цилиндропоршневыми группами и коленчатым валом. Входными координатами собственно двигателя (рис. 1.5,а) являются цикловые подачи топлива gц, воздуха Gд и нагрузка N, а выходными координатами - ω (угловая скорость коленчатого вала) и Gг (подача газа в выпускной коллектор).
Для топливной аппаратуры 2 (см. рис. 1.4) цикловая подача топлива gц - выходная координата, а положение h органа управления рейки 5 — входная координата (рис. 1.5,б). Так как gц золотниковых топливных насосов заметно зависит от угловой скорости ωн кулачкового вала, то ωн - вторая входная координата топливной аппаратуры.
Впускной коллектор 1 (см. рис. 1.4) получает воздух от компрессора 3 в количестве Gк в единицу времени (входная координата) и отдает его цилиндрам двигателя в количестве Gд в единицу времени (выходная координата, рис. 1.5,в).
Аналогичную функциональную схему имеет выпускной коллектор 6 (см. рис. 1.4), у которого Gг (поступление газа из цилиндров двигателя 7) - входная координата и GT - подача газа к турбине 4 - выходная координата (рис. 1.5,г).
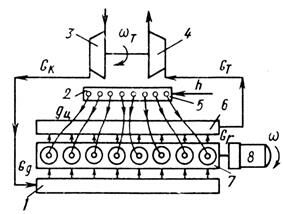
Рис. 1.4 Схема дизеля с автономным турбонаддувом
Входными координатами компрессора (рис. 1.5,д) являются ωк - угловая скорость ротора турбокомпрессора, Ga - количество воздуха, поступающего из подводящего патрубка с воздушным фильтром и hк - положение органа управления (при регулируемом турбонаддуве). Выходной координатой является подача воздуха Gк в единицу времени во впускной коллектор. Для турбины (рис. 1.5,е) поступление газа GT из выпускного коллектора в единицу времени и hT - положение органа управления турбиной (при регулируемом турбонаддуве) - входные координаты, а ωк и Gyx - количество таза, уходящего из турбины в единицу времени - выходные координаты. При свободном входе воздуха в компрессор и выпуске газа из турбины координаты Ga и Gyx в функциональных схемах не учитываются. Совокупность функциональных ' схем элементов (рис. 1.5,а - е) дает возможность составить функциональную схему комбинированного двигателя в целом. На рис. 1.5,ж показана такая схема для дизеля с автономным турбокомпрессором (см. рис. 1.4).
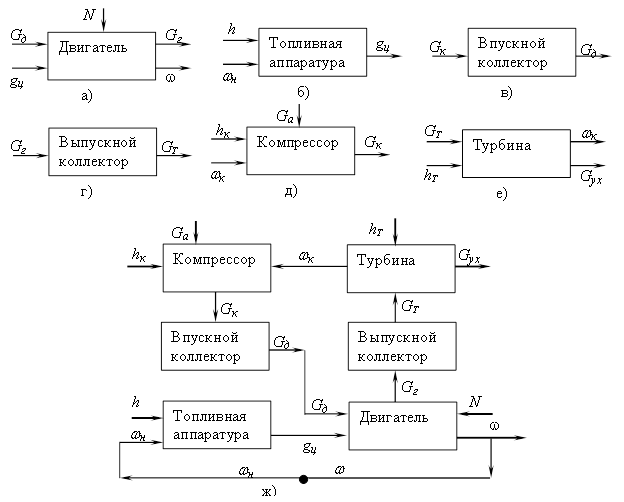 |
Рис. 1.5 Функциональные схемы двигателя внутреннего сгорания (как регулируемого объекта) и его элементов
1.2. Равновесные (установившиеся) режимы работы двигателя
Режим работы двигателя называется установившимся, если числовые значения всех параметров сохраняются постоянными во времени. Но необходимо учитывать, что при циклическом характере работы двигателя значения ряда параметров (например ω) колеблются относительно некоторых средних значений. Тогда для установившегося режима выбираются эти средние значения. Работа двигателя в установившемся режиме возможна только при выполнении условий статического равновесия, в связи, с чем установившиеся режимы часто называются равновесными. Так, например, постоянство во времени ω при равновесном режиме возможно при выполнении условия.
Мо - Мсо = 0, (1.2)
где Мо - крутящий момент двигателя; Мсо - момент потребителя (сопротивление), и индексом «0» отмечаются значения параметров, соответствующие выбранному равновесному режиму.
Постоянство теплового состояния двигателя (температуры охлаждающей воды) обеспечивается при выполнении условия
Qпo - Qpo = 0, (1.3)
где Qпo –количество теплоты, поступившее от двигателя в систему охлаждения в единицу времени; Qpo – отдача теплоты (через радиатор) окружающей среде в единицу времени.
Значения параметров на возможных установившихся режимах работы двигателя строго ограничены прочностными, тепловыми и газодинамическими возможностями. Например, угловая скорость ω должна изменяться только в пределах от ωмах до ωмин (рис. 1.6), так как:
- при ω < ωмин не обеспечивается смесеобразование и не возникает вспышка рабочей смеси (двигатель глохнет);
- а максимально возможное значение ωмах ограничивается количеством топлива, которое может сгореть в камере сгорания в каждом цикле и т.д.
Эти ограничения отражаются на Рис. 1.6 где показаны некоторые характеристики двигателя и потребителя. Точки пересечения этих характеристик соответствуют установившимся режимам. Например, режим А устанавливается на пересечении внешней скоростной характеристики двигателя и характеристики ХП1 потребителя. Этот режим соответствует линии номинальных (наиболее приемлемых) угловых скоростей.
Таким образом, возможные установившиеся режимы двигателя охватывают некоторую область, показанную на рис. 1.6 в виде площади, ограниченной линиями (min, max, внешняя скоростная характеристика- 1). Режим А1 устанавливается если при работе двигателя по внешней скоростной характеристике, резко подает нагрузка потребителя. Этот режим является «опасным», т.к. скорость ω становится выше допустимой.
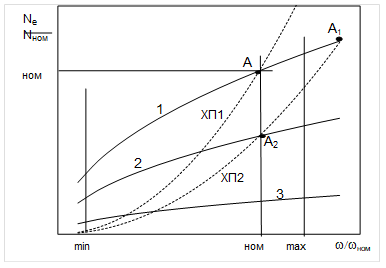 |
Рис 1.6 Совмещенные характеристики двигателя и потребителя. 1 - внешняя скоростная характеристика двигателя; 2 - частичная скоростная характеристика двигателя; 3 – характеристика холостого хода; ХП1 , ХП2 – характеристики потребителя; А , А1 , А2 – точки установившихся (равновесных) режимов; min, ном, max – линии минимальных, номинальных и максимальных режимов (соответственно)
Последовательная совокупность установившихся режимов при постоянстве одного из выбранных параметров образует соответствующую статическую характеристику двигателя. Например, М = f(ω) при h = const (положение рейки топливного насоса) дает скоростную характеристику; h = f(ω) при М = const - регулировочную характеристику; М = f(h) при ω = const - нагрузочную характеристику и т.д.
Устойчивость установившегося режима работы
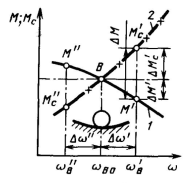
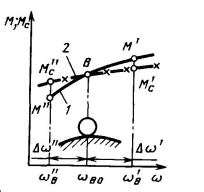
Установившиеся режимы работы двигателя могут быть устойчивыми и неустойчивыми. К устойчивым относятся режимы, самопроизвольно восстанавливающиеся при случайных отклонениях. Так, например, нарушение установившегося скоростного режима, характеризуемого точкой В (Рис. 1.7,а) на пересечении скоростных характеристик 1 двигателя и 2 потребителя, приводит к отклонению угловой скорости коленчатого вала на Δω' или Δω". При ωв = ωво + Δω' условие (1.2) нарушается, так как М'с > М', в связи с чем ω уменьшается, и режим, соответствующий точке В, восстанавливается. При ω = ωВо - Δω", наоборот, М" > М'с, поэтому ω увеличивается, и режим также возвращается к исходному. Способность двигателя восстанавливать нарушенный установившийся режим называется самовыравниванием (устойчивостью). Противоположное взаимное расположение характеристик двигателя 1 и потребителя 2 (Рис. 1.7,в) соответствует неустойчивому режиму работы.
 |  | ||
а) в)
Рис 1.7. Условия устойчивости режима работы двигателя: а - устойчивый режим; в - неустойчивый режим; 1 - характеристика двигателя; 2 - характеристика потребителя
Устойчивость равновесного режима работы двигателя определяется дисбалансом ΔМ крутящего момента двигателя и момента потребителя при данном отклонении Δω угловой скорости и оценивается отношением
 (1.4)
(1.4)
Отсюда, учитывая, что:  и переходя к дифференциалам, получим:
и переходя к дифференциалам, получим:
 (1.5)
(1.5)
Если F∂ > 0, то режим работы двигателя – устойчив, при F∂ < 0 – неустойчив. Аналогичными дифференциальными соотношениями характеризуется устойчивость других режимов характеризующих двигатель, например, для теплового режима двигателя имеем:
 (1.6)
(1.6)
где Т температура воды на выходе из головки двигателя.
Числовые значения факторов устойчивости определяются по соответствующим статическим характеристикам М = f(ω), Мс = f(ω), Qр = f(Т), Qa = f (T),) и т. д.
1.3 Уравнения неустановившихся (динамических) режимов работы двигателя
Единственным и исчерпывающим признаком появления в процессе работы двигателя неустановившихся режимов является изменение во времени одного, нескольких или всех параметров, определяющих работу двигателя. Например, при неустановившихся режимах справедлива зависимость:
Ne = f(M, α, ω, Pk, ….t) (1.7)
свидетельствующую о том, что значения параметров, входящих в эту формулу, имеют смысл лишь для конкретно выбранного мгновения t.
При возникновении неустановившихся режимов нарушаются условия (1.2, 1.3) статического равновесия, в результате чего в двигателе оказывается избыточное или недостаточное количество энергии. Например, избыточный крутящий момент в связи с нарушением условия (1.2) вызывает увеличение угловой скорости ω, описываемое дифференциальным уравнением:
J dω/dt = М – Мс, (1.8)
составленным в соответствии с принципом Даламбера (J - приведенный момент инерции двигателя и связанных с ним агрегатов).
Нарушение теплового баланса (1.3) в системе охлаждения двигателя приводит к изменению температуры охлаждающей воды (или воздуха) в соответствии с дифференциальным уравнением:
C dT/dt= Qп - Qр (1.9)
где С — теплоемкость системы охлаждения двигателя.
Сопоставление уравнений (1.2, 1.3) с уравнениями (1.8, 1.9) показывает, что признаками установившегося режима являются также условия dω /dt = 0; dT /dt = 0 и т. д., свидетельствующие о постоянстве во времени соответствующих параметров, характеризующих работу двигателя.
Последовательная во времени совокупность неустановившихся режимов называется переходным процессом. В зависимости от выбранного параметра переходные процессы могут быть скоростными ω = f(t), нагрузочными М = f(t), регулировочными h = f(t), тепловыми Т = f(t) и т. д. Переходные процессы являются важнейшими характеристиками двигателя, определяющими его динамические свойства как регулируемого объекта, поэтому их часто называют также динамическими характеристиками. Эти характеристики определяются путем решения соответствующих дифференциальных уравнений.
Уравнение частоты вращения коленчатого вала для неустановившегося режима.
В современных автомобилях широко используются двигатели как с наддувом, так и без наддува. В теории автоматического регулирования более просто описываются переходные процессы для двигателя без наддува. Поэтому ниже приведена детализация дифференциального уравнения (1.8) для такого двигателя.
Сначала представим текущие значения ω, М Мс через сумму значений: ωо, Мо Мсо (значения в выбранном равновесном режиме – постоянные величины) и отклонений: ∆ω, ∆M, ∆Мс (переменные величины):
ω = ωо + ∆ω, М = Мо + ∆M Мс = Мсо + ∆Мс (1.10)
. Подстановка текущих значений параметров в уравнение (1.8) с учетом уравнения (1.2) приводит его к виду
J d( Δω)/dt = ΔМ – ΔМс (1.11)
Так как цикловая подача топлива определяется положением h органа управления (рейки, дроссельной заслонки) и угловой скоростью ω коленчатого вала, то:
 (1.13)
(1.13)
Разложение данной функциональной зависимости в ряд Тейлора и последующая линеаризация позволяют получить зависимость
 (1.14)
(1.14)
Момент Мс потребителя (рис. 1.6) зависит от угловой скорости ω и настройки N потребителя (например, выбор угла атаки винта, передачи, угла наклона дороги и т. п.), т. е.
 (1.15)
(1.15)
Аналогичная линеаризация этой формулы приводит к зависимости:
 (1.16)
(1.16)
Подставив (1.14) и (1.16) в (1.11) получим:

 (1.17)
(1.17)
далее, учитывая (1.5) имеем:
 (1.18)
(1.18)
Разделим (1.18) на комплекс qh =  , называемый коэффициентом эффективности воздействия на двигатель. Тогда соотношение (1.18) можно записать в виде
, называемый коэффициентом эффективности воздействия на двигатель. Тогда соотношение (1.18) можно записать в виде
 (1.19)
(1.19)
С целью последующего упрощения уравнения произведем замены:


 , (1.20)
, (1.20)
где:
 - относительное изменение угловой скорости (зависимая величина, которую необходимо определить);
- относительное изменение угловой скорости (зависимая величина, которую необходимо определить);
κ - задаваемое относительное изменение положения рейки топливного насоса;
α∂ - задаваемое относительное изменение нагрузки потребителя,
а также введем следующие обозначения:
– время собственно двигателя (сек.)
 (1.21)
(1.21)
– безразмерный коэффициент самовыравнивания:
 (1..22).
(1..22).
безразмерный коэффициент усиления по настройке потребителя (по нагрузке)
 (1.23)
(1.23)
Тогда после всех подстановок перепишем (1.19) в виде:
 (1.24)
(1.24)
В теории автоматического регулирования широко используется операторная запись дифференциальных уравнений. В этом случае операция дифференцирования по времени d/dt обозначается символом (оператором) p, и уравнение (1.24) в операторной записи имеет вид
 (1.25)
(1.25)
где  - есть собственный оператор, который обозначается как:
- есть собственный оператор, который обозначается как:
 (1.26)
(1.26)
В результате уравнение (1.26) примет вид:
 (1.27)
(1.27)
Операторная запись дифференциального уравнения дает возможность получить передаточные функции некоторого элемента, характеризующие воздействие на него той или иной входной координаты. Для этого все члены уравнения следует поделить на собственный оператор  . В этом случае уравнение (1.27) запишется в виде
. В этом случае уравнение (1.27) запишется в виде
 (1.28)
(1.28)
где  - передаточная функция по ходу рейки, определяемая по выражению:
- передаточная функция по ходу рейки, определяемая по выражению:
 (1.29)
(1.29)
"2 Геометрическая интерпретация дифференциального уравнения первого порядка" - тут тоже много полезного для Вас.
 - передаточная функция по нагрузке, определяемая по выражению:
- передаточная функция по нагрузке, определяемая по выражению:
 (1.30)
(1.30)
Таким образом, число передаточных функций элемента (двигателя) соответствует числу его входных координат  .
.
Запись дифференциального уравнения (1.25) через передаточные функции дает возможность построить структурную схему элемента, отражающую его динамические свойства. Каждая передаточная функция в структурной схеме изображается прямоугольником, а входные и выходные координаты - стрелками. В соответствии с уравнением (1.30) все выходные координаты суммируются, поэтому структурная схема собственно двигателя будет иметь вид, показанный на рис. 1.8.
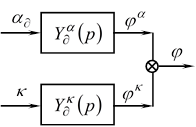 |
Рис. 1.8 Функциональная схема двигателя без наддува.


















