
Кинетическая энергия системы
Кинетическая энергия системы.
Кинетической энергией системы называется скалярная величина Т, равная арифметической сумме кинетических энергий всех точек системы

Кинетическая энергия является характеристикой и поступательного и вращательного движения системы, поэтому теоремой об изменении кинетической энергии особенно часто пользуются при решении задач.
Если система состоит из нескольких тел, то ее кинетическая энергия равна, очевидно, сумме кинетических энергий этих тел:

Кинетическая энергия – скалярная и всегда положительная величина.
Найдем формулы для вычисления кинетической энергии тела в разных случаях движения.
1. Поступательное движение. В этом случае все точки тела движутся с одинаковыми скоростями, равными скорости движения центра масс. То есть, для любой точки 
Рекомендуемые материалы

или
Таким образом, кинетическая энергия тела при поступательном движении равна половине произведения массы тела на квадрат скорости центра масс. От направления движения значение Т не зависит.
2. Вращательное движение. Если тело вращается вокруг какой-нибудь оси Оz (см. рис.46), то скорость любой его точки  , где
, где  - расстояние точки от оси вращения, а w- угловая скорость тела. Подставляя это значение и вынося общие множители за скобку, получим:
- расстояние точки от оси вращения, а w- угловая скорость тела. Подставляя это значение и вынося общие множители за скобку, получим:

Величина, стоящая в скобке, представляет собою момент инерции тела относительно оси z. Таким образом, окончательно найдем:

т. е. кинетическая энергия тела при вращательном движении равна половине произведения момента инерции тела относительно оси вращения на квадрат его угловой скорости. От направления вращения значение Т не зависит.
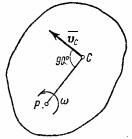
Рис.46
При вращении тела вокруг неподвижной точки кинетическая энергия определяется как (рис.47)

или, окончательно,
 ,
,
где Ix, Iy,Iz – моменты инерции тела относительно главных осей инерции x1, y1, z1 в неподвижной точке О ;  ,
,  ,
, – проекции вектора мгновенной угловой скорости
– проекции вектора мгновенной угловой скорости  на эти оси.
на эти оси.
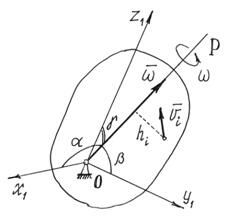
Рис.47
3. Плоскопараллельное движение. При этом движении скорости всех точек тела в каждый момент времени распределены так, как если бы тело вращалось вокруг оси, перпендикулярной к плоскости движения и проходящей через мгновенный центр скоростей Р (рис.46). Следовательно
 ,
,
где  - момент инерции тела относительно названной выше оси, w- угловая скорость тела. Величина в формуле будет переменной, так как положение центра Р при движении тела все время меняется. Введем вместо постоянный момент инерции
- момент инерции тела относительно названной выше оси, w- угловая скорость тела. Величина в формуле будет переменной, так как положение центра Р при движении тела все время меняется. Введем вместо постоянный момент инерции  , относительно оси, проходящей через центр масс С тела. По теореме Гюйгенса
, относительно оси, проходящей через центр масс С тела. По теореме Гюйгенса  , где d=PC. Подставим это выражение для . Учитывая, что точка Р - мгновенный центр скоростей, и, следовательно,
, где d=PC. Подставим это выражение для . Учитывая, что точка Р - мгновенный центр скоростей, и, следовательно,  , где
, где  - скорость центра масс С, окончательно найдем:
- скорость центра масс С, окончательно найдем:
 .
.
Следовательно, при плоскопараллельном движении кинетическая энергия тела равна энергии поступательного движения со скоростью центра масс, сложенной скинетической энергией вращательного движения вокруг центра масс.
4) Для самого общего случая движения материальной системы кинетическую энергию помогает вычислить теорема Кенига.
Рассмотрим движение материальной системы как сумму двух движений (рис.48). Переносного – поступательного движения вместе с центром масс С и относительного – движения относительно поступательно движущихся вместе с центром масс осей x1, y1, z1. Тогда скорость точек  . Но переносное движение – поступательное. Поэтому переносные скорости всех точек равны, равны
. Но переносное движение – поступательное. Поэтому переносные скорости всех точек равны, равны  . Значит,
. Значит,  и кинетическая энергия будет
и кинетическая энергия будет


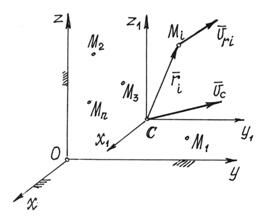
Рис.48
По определению центра масс его радиус-вектор в подвижной системе  (центр масс находится в начале координат), значит, и
(центр масс находится в начале координат), значит, и  . Производная по времени от этой суммы также равна нулю:
. Производная по времени от этой суммы также равна нулю:
 .
.
Поэтому, окончательно, кинетическая энергия системы
 (1)
(1)
Кинетическая энергия материальной системы равна сумме кинетической энергии при поступательном движении вместе с центром масс и кинетической энергии ее при движении относительно координатных осей, поступательно движущихся вместе с центром масс.
В общем случае движения тела, которое можно рассматривать как сумму двух движений (переносного – поступательного вместе с центром масс С и относительного – вращения вокруг точки С), по теореме Кенига (1) получим
 или
или  ,
,
где Ix, Iy, Iz – главные центральные оси инерции тела.
Некоторые случаи вычисления работы.
1) Работа сил тяжести, действующих на систему. Работа силы тяжести, действующей на частицу весом  , будет равна
, будет равна  , где
, где  и
и  - координаты, определяющие начальное и конечное положение частицы. Тогда сумма работ всех сил тяжести, действующих на систему, будет равна
- координаты, определяющие начальное и конечное положение частицы. Тогда сумма работ всех сил тяжести, действующих на систему, будет равна
 ,
,
где Р - вес системы,  - вертикальное перемещение центра тяжести (или центра масс). Следовательно, работа сил тяжести, действующих на систему, вычисляется как работа их равнодействующей Р на перемещении центра тяжести (или центра масс) системы.
- вертикальное перемещение центра тяжести (или центра масс). Следовательно, работа сил тяжести, действующих на систему, вычисляется как работа их равнодействующей Р на перемещении центра тяжести (или центра масс) системы.
2) Работа сил, приложенных к вращающемуся телу. Элементарная работа приложенной к телу силы F (рис.49) будет равна
 ,
,
так как  , где
, где  - угол поворота тела.
- угол поворота тела.
Но, как легко видеть,  . Будем называть величину
. Будем называть величину  вращающим моментом. Тогда получим:
вращающим моментом. Тогда получим:  .
.
Следовательно, в рассматриваемом случае элементарная работа равна произведению вращающего момента на элементарный угол поворота. Формула справедлива и при действии нескольких сил, если считать  .
.
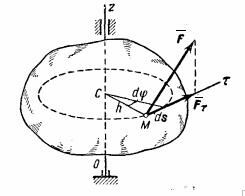
Рис.49
При повороте на конечный угол  работа будет равна
работа будет равна
 ,
,
а в случае постоянного момента 
 .
.
|
Если на тело действует пара сил, лежащая в плоскости, перпендикулярной к оси Оz, то Мz будет, очевидно, означать момент этой пары.
Укажем еще, как в данном случае определяется мощность
 .
.
Следовательно, при действии сил на вращающееся тело мощность равна произведению вращающего момента на угловую скорость тела. При той же самой мощности вращающий момент будет тем больше, чем меньше угловая скорость.
3) Работа сил трения, действующих на катящееся тело. На колесо радиуса R (рис.50), катящееся по некоторой плоскости (поверхности) без скольжения, действует сила трения F ,препятствующая скольжению точки касания В вдоль плоскости. Элементарная работа этой силы  . Но точка В в данном случае является мгновенным центром скоростей и
. Но точка В в данном случае является мгновенным центром скоростей и  . Так как
. Так как  , то
, то  и для каждого элементарного перемещения
и для каждого элементарного перемещения  .
.
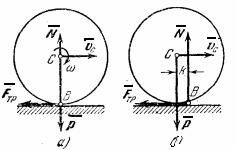
Рис.50
Следовательно, при качении без скольжения, работа силы трения, препятствующей скольжению, на любом перемещении тела равна нулю. По той же причине в этом случае равна нулю и работа нормальной реакции N, если считать тела недеформируемыми и силу N приложенной в точке В (как на рис.50,а).
Сопротивление качению, возникающее вследствие деформации поверхностей (pис.50,б), создает пару ( ), момент которой
), момент которой  , где k- коэффициент трения качения. Тогда учитывая, что при качении угол поворота колеса
, где k- коэффициент трения качения. Тогда учитывая, что при качении угол поворота колеса  , получим:
, получим:
 ,
,
где  - элементарное перемещение центра С колеса.
- элементарное перемещение центра С колеса.
Если N= const, то полная работа сил сопротивления качению будет равна

Так как величина  мала, то при наличии других сопротивлений сопротивлением качению можно в первом приближении пренебрегать.
мала, то при наличии других сопротивлений сопротивлением качению можно в первом приближении пренебрегать.
Теорема об изменении кинетической энергии системы.
Если рассмотреть какую-нибудь точку системы с массой  , имеющую скорость
, имеющую скорость  , то для этой точки будет
, то для этой точки будет
 ,
,
где  и
и  - элементарные работы действующих на точку внешних и внутренних сил. Составляя такие уравнения для каждой из точек системы и складывая их почленно, получим
- элементарные работы действующих на точку внешних и внутренних сил. Составляя такие уравнения для каждой из точек системы и складывая их почленно, получим
 ,
,
или
 . (2)
. (2)
Равенство выражает теорему об изменении кинетической энергии системы в дифференциальной форме.
Если полученное выражение отнести к элементарному промежутку времени, в течение которого произошло рассматриваемое перемещение, можно получить вторую формулировку для дифференциальной формы теоремы: производная по времени от кинетической энергии механической системы равна сумме мощностей всех внешних ( ) и внутренних (
) и внутренних ( ) сил, т.е.
) сил, т.е.
 .
.
Дифференциальными формами теоремы об изменении кинетической энергии можно воспользоваться для составления дифференциальных уравнений движения, но это делается достаточно редко, потому что есть более удобные приемы.
Проинтегрировав обе части равенства (2) в пределах, соответствующих перемещению системы из некоторого начального положения, где кинетическая энергия равна  , в положение, где значение кинетической энергии становится равным
, в положение, где значение кинетической энергии становится равным  , будемиметь
, будемиметь
 .
.
Полученное уравнение выражает теорему об изменении кинетической энергии в конечном виде: изменение кинетической энергии системы при некотором ее перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил.
В отличие от предыдущих теорем, внутренние силы в уравнениях не исключаются. В самом деле, если  и
и  - силы взаимодействия между точками
- силы взаимодействия между точками  и
и  системы (см. рис.51), то
системы (см. рис.51), то  . Но при этом точка , может перемещаться по направлению к , а точка - по направлению к . Работа каждой из сил будет тогда положительной и сумма работ нулем не будет. Примером может служить явление отката. Внутренние силы (силы давления), действующие и на снаряд и на откатывающиеся части, совершают здесь положительную работу. Сумма этих работ, не равная нулю, и изменяет кинетическую энергию системы от величины
. Но при этом точка , может перемещаться по направлению к , а точка - по направлению к . Работа каждой из сил будет тогда положительной и сумма работ нулем не будет. Примером может служить явление отката. Внутренние силы (силы давления), действующие и на снаряд и на откатывающиеся части, совершают здесь положительную работу. Сумма этих работ, не равная нулю, и изменяет кинетическую энергию системы от величины  в начале выстрела до величины
в начале выстрела до величины  конце.
конце.
Другой пример: две точки, соединенные пружиной. При изменении расстояния между точками упругие силы, приложенные к точкам, будут совершать работу. Но если система состоит из абсолютно твердых тел и связи между ними неизменяемые, не упругие, идеальные, то работа внутренних сил будет равна нулю и их можно не учитывать и вообще не показывать на расчетной схеме.
Рассмотрим два важных частных случая.
1) Неизменяемая система. Неизменяемой будем называть систему, в которой расстояния между точками приложения внутренних сил при движении системы не изменяются. В частности, такой системой является абсолютно твердое тело или нерастяжимая нить.
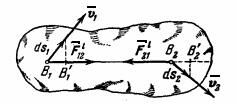
Рис.51
Пусть две точки и неизменяемой системы (pис.51), действующие друг на друга с силами и ( ) имеют в данный момент скорости
) имеют в данный момент скорости  и
и  . Тогда за промежуток времени dt эти точки совершат элементарные перемещения
. Тогда за промежуток времени dt эти точки совершат элементарные перемещения  и
и  , направленные вдоль векторов и . Но таккак отрезок
, направленные вдоль векторов и . Но таккак отрезок  является неизменяемым, то по известной теореме кинематики проекции векторов и ,а, следовательно, и перемещений
является неизменяемым, то по известной теореме кинематики проекции векторов и ,а, следовательно, и перемещений  и
и  на направление отрезка будут равны друг другу, т.е.
на направление отрезка будут равны друг другу, т.е.  . Тогда элементарные работы сил и будут одинаковы по модулю и противоположны по знаку и в сумме дадут нуль. Этот результат справедлив для всех внутренних сил при любом перемещении системы.
. Тогда элементарные работы сил и будут одинаковы по модулю и противоположны по знаку и в сумме дадут нуль. Этот результат справедлив для всех внутренних сил при любом перемещении системы.
Отсюда заключаем, что для неизменяемой системы сумма работ всех внутренних сил равна нулю и уравнения принимают вид
 или
или  .
.
2) Система с идеальными связями. Рассмотрим систему, на которую наложены связи, не изменяющиеся со временем. Разделим все действующие на точки системы внешние и внутренние силы на активные и реакции связей. Тогда
 ,
,
где  - элементарная работа действующих на k-ю точку системы внешних и внутренних активных сил, a
- элементарная работа действующих на k-ю точку системы внешних и внутренних активных сил, a  - элементарная работа реакций наложенных на ту же точку внешних и внутренних связей.
- элементарная работа реакций наложенных на ту же точку внешних и внутренних связей.
Как видим, изменение кинетической энергии системы зависит от работы и активных сил и реакций связей. Однако можно ввести понятие о таких «идеальных» механических системах, у которых наличие связей не влияет на изменение кинетической энергии системы при ее движении. Для таких связей должно, очевидно, выполняться условие:
 .
.
Если для связей, не изменяющихся со временем, сумма работ всех реакций при элементарном перемещении системы равна нулю, то такие связи называют идеальными. Для механической системы, на которую наложены только не изменяющиеся со временем идеальные связи, будем, очевидно, иметь
 или
или  .
.
Таким образом, изменение кинетической энергии системы с идеальными, не изменяющимися со временем связями при любом ее перемещении равно сумме работ на этом перемещении, приложенных к системе внешних и внутренних активных сил.
Механическая система называется консервативной (энергия ее как бы законсервирована, не изменяется), если для нее имеет место интеграл энергии
 или
или  (3)
(3)
Это есть закон сохранения механической энергии: при движении системы в потенциальном поле механическая энергия ее (сумма потенциальной и кинетической) все время остается неизменной, постоянной.
Механическая система будет консервативной, если действующие на нее силы потенциальны, например сила тяжести, силы упругости. В консервативных механических системах с помощью интеграла энергии можно проводить проверку правильности составления дифференциальных уравнений движения. Если система консервативна, а условие (3) не выполняется, значит при составлении уравнений движения допущена ошибка.
Интегралом энергии можно воспользоваться для проверки правильности составления уравнений и другим способом, без вычисления производной. Для этого следует после проведения численного интегрирования уравнений движения вычислить значение полной механической энергии для двух различных моментов времени, например, начального и конечного. Если разница значений окажется сопоставимой с погрешностями вычислений, это будет свидетельствовать о правильности используемых уравнений.
Все предыдущие теоремы позволяли исключить из уравнений движения внутренние силы, но все внешние силы, в том числе и наперед неизвестные реакции внешних связей, в уравнениях сохранялись. Практическая ценность теоремы об изменении кинетической энергии состоит в том, что при не изменяющихся со временем идеальных связях она позволит исключить из уравнений движения все наперед неизвестные реакции связей.
Теорему об изменении кинетической энергии удобно использовать при решении задач, в которых требуется установить зависимость между скоростями и перемещениями тел.
Пример 13. Какую скорость надо сообщить точке М стержня, прикрепленного верхним концом с помощью шарнира О к неподвижной поверхности (рис.52), чтобы стержень совершил четверть оборота?
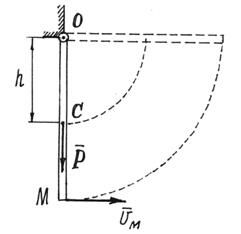
Рис.52
В первом, вертикальном, положении кинетическая энергия стержня, начавшего вращаться вокруг оси О,
 .
.
Во втором положении, где стержень достигнет горизонтального положения и остановится на мгновение, Т2 = 0.
Работу совершит только вес стержня Р:  По теореме получим уравнение
По теореме получим уравнение  , из которого следует
, из которого следует 
Пример 14. Механическая система состоит из двух шаров A и B, связанных с шарниром O и ползуном C невесомыми стержнями.
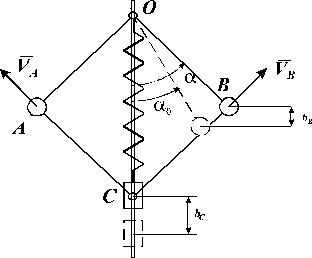
Рис.53
Массы шаров и ползуна одинаковы и равны  =0,2 кг. Стержни имеют одинаковую длину
=0,2 кг. Стержни имеют одинаковую длину  = 0,3 м. Между шарниром и ползуном установлена пружина жесткостью c =100 Н/м, длина которой в недеформированном состоянии равна (рис.53) Требуется определить зависимость скоростей движения шаров от угла отклонения стержней от вертикали
= 0,3 м. Между шарниром и ползуном установлена пружина жесткостью c =100 Н/м, длина которой в недеформированном состоянии равна (рис.53) Требуется определить зависимость скоростей движения шаров от угла отклонения стержней от вертикали  и найти максимальное отклонение, если в начальный момент времени система покоилась, а угол составлял
и найти максимальное отклонение, если в начальный момент времени система покоилась, а угол составлял  .
.
Кинетическая энергия системы складывается из кинетических энергий трех тел, которые по условию могут рассматриваться как материальные точки.
 (4)
(4)
Скорости шаров пропорциональны угловой скорости вращения стержней OA иOB

Скорость ползуна нетрудно определить, если учесть, что

Тогда

Подставляя выражения для скоростей в (4), получим зависимость кинетической энергии системы от скоростей шаров V и угла отклонения стержней
 . (5)
. (5)
Определим работу, которую совершат все силы, приложенные к системе при ее перемещении из начального положения в конечное. Работа сил тяжести определяется вертикальными перемещениями центров тяжести тел (см. рис.53):
 (6)
(6)
Для вычисления работы силы упругости воспользуемся формулой:
 (7)
(7)
Подставляя выражения (5), (6) и (7) в уравнение теоремы об изменении кинетической энергии, получаем зависимость скорости движения шаров от угла
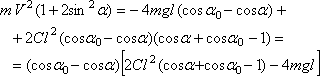
или в явном виде
 (8)
(8)
Если в уравнении 8 скорость V приравнять нулю, можно найти два предельных значения угла , между которыми будет происходить движение системы при заданным начальных условиях:
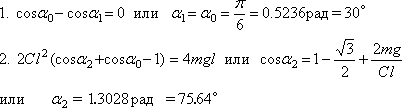
Пример 15. Доска веса Pположена на два катка веса Q каждый. На доску действует постоянная сила F, составляющая с горизонтом угол (рис.84). Катки являются однородными дисками, а проскальзывания катков с доской и с горизонтальной плоскостью нет. В начальный момент времени система покоились. Определить ускорение доски.
Рис.84
Решение. Исследуемой механической системой в данной задаче являетсядоска вместе с катками. Для решения задачи применим теорему об изменении кинетической энергии:  . В качестве
. В качестве  и
и  возьмем значения кинетической энергии системы в произвольный момент времени
возьмем значения кинетической энергии системы в произвольный момент времени  и в начальный момент времени
и в начальный момент времени  . По условию задачи в начальный момент времени система покоилась, поэтому
. По условию задачи в начальный момент времени система покоилась, поэтому  . Кинетическая энергия в момент времени t складывается из кинетической энергии доски
. Кинетическая энергия в момент времени t складывается из кинетической энергии доски  и двух катков
и двух катков  :
:  . Так как доска движется поступательно, то
. Так как доска движется поступательно, то  . Каждый из катков совершает плоское движение, поэтому, согласно теореме Кенига,
. Каждый из катков совершает плоское движение, поэтому, согласно теореме Кенига,
 ,
,
где Vc – скорость оси катка,  – угловая скорость его вращения, а Jc – момент инерции катка относительно его оси. Так как каток является однородным диском, то
– угловая скорость его вращения, а Jc – момент инерции катка относительно его оси. Так как каток является однородным диском, то  , где r – радиус катка. Учитывая теперь условие отсутствия проскальзывания катков с доской и с плоскостью, выпишем кинематические соотношения, связывающие V, Vc и : V = 2Vc,
, где r – радиус катка. Учитывая теперь условие отсутствия проскальзывания катков с доской и с плоскостью, выпишем кинематические соотношения, связывающие V, Vc и : V = 2Vc,  . Следовательно,
. Следовательно,  , и тогда
, и тогда  .
.
Вычислим теперь работу всех внешних и внутренних сил за интервал времени от  до
до  . Так как система состоит из абсолютно твердых тел и при этом проскальзывание между доской и катками отсутствует, то сумма работ всех внутренних сил
. Так как система состоит из абсолютно твердых тел и при этом проскальзывание между доской и катками отсутствует, то сумма работ всех внутренних сил  . Внешними силами, действующими на систему, являются силы тяжести доски P и катков Q, постоянная сила F, нормальные реакции плоскости N1 и N2 и силы трения между катками и плоскостью F1 и F2, приложенные в точках контакта
. Внешними силами, действующими на систему, являются силы тяжести доски P и катков Q, постоянная сила F, нормальные реакции плоскости N1 и N2 и силы трения между катками и плоскостью F1 и F2, приложенные в точках контакта  и
и  катков (см. рис. 84). Из всех сил работу совершает только сила F, т.е.
катков (см. рис. 84). Из всех сил работу совершает только сила F, т.е.  , где S – перемещение доски за время . Действительно, силы тяжести работу не совершают, так как перемещения точек приложения этих сил перпендикулярны их направлениям. Нормальные же реакции N1, N2 и силы трения F1, F2 работу не совершают, так как они приложены к мгновенным центрам скоростей и катков (в силу отсутствия проскальзывания между катками и плоскостью). Поэтому элементарные перемещения этих точек равны нулю
, где S – перемещение доски за время . Действительно, силы тяжести работу не совершают, так как перемещения точек приложения этих сил перпендикулярны их направлениям. Нормальные же реакции N1, N2 и силы трения F1, F2 работу не совершают, так как они приложены к мгновенным центрам скоростей и катков (в силу отсутствия проскальзывания между катками и плоскостью). Поэтому элементарные перемещения этих точек равны нулю  , тем самым равна нулю и элементарная работа указанных сил. Следовательно, равна нулю и суммарная их работа за время от до .
, тем самым равна нулю и элементарная работа указанных сил. Следовательно, равна нулю и суммарная их работа за время от до .
"КАТУЛЛ Гай Валерий" - тут тоже много полезного для Вас.
Таким образом, теорема об изменении кинетической энергии в данном случае имеет вид
 . (1)
. (1)
Для определения ускорения доски  продифференцируем равенство (1) по времени
продифференцируем равенство (1) по времени
 .
.
Учитывая теперь, что  и сокращая последнее равенство на общий множитель
и сокращая последнее равенство на общий множитель  , окончательно получаем
, окончательно получаем
 .
.




















