
Кинематические соединения
Лекция N2
Каким бы не был механизм машины он всегда состоит только из звеньев и кинематических пар.
Условия связи, налагаемые в механизмах на подвижные звенья, в теории машин и механизмов Принято называть кинематическими парами.
Кинематической парой называется подвижное соединение двух соприкасающихся звеньев, обеспечивающее их определенное относительное движение.
В табл. 2.1 приведены названия, рисунки, условные обозначения наиболее распространенных на практике кинематических пар, а также произведена их классификация.
Звенья при объединении их в кинематическую пару могут соприкасаться между собой по поверхностям, линиям и точкам.
Элементами кинематической пары называют совокупность Поверхностей, линий или точек, по которым происходит подвижное соединение двух звеньев и которые образуют кинематическую Пару. В зависимости от вида контакта элементов кинематических пар различают высшие и низшие кинематические пары.
Кинематические пары, образованные элементами в виде линии или точки,называются высшими.
Кинематические пары, образованные элементами в виде поверхностей, называются низшими.
Рекомендуемые материалы
Чтобы пара существовала, элементы входящих в нее звеньев должны находиться в постоянном контакте, Т.е. быть замкнутыми. Замыкание кинематических пар может быть геометрически или силовым, Например, с помощью собственной массы, пружин и т.п..
Прочность, износостойкость и Долговечность кинематических пар зависят от их вида и конструктивного исполнения. Низшие пары более износостойкие, чем высшие. Это объясняется тем, что в низших Парах контакт элементов пар происходит по поверхности, а следовательно, при одинаковой нагрузке в ней возникают меньшие удельные давления, чем в высшей. Износ, при прочих равных условиях, Пропорционален удельному давлению, а поэтому низшие Пары изнашиваются Медленнее, Чем высшие. Поэтому с целью уменьшения износа в машинах предпочтительнее использование низших пар, однако часто применение высших кинематических пар позволяет значительно упростить структурные схемы машин, что снижает их Габариты и упрощает конструкцию. Поэтому правильный выбор кинематических пар является сложной инженерной задачей.
Кинематические Пары разделяют также по числу степеней свободы (подвижности), которые она предоставляет соединенным посредством ее звеньям, или по числу условий связей (класс пары), налагаемых парой на относительное движение соединяемых звеньев. При использовании такой классификации разработчики машин получают сведений о возможных относительных движениях звеньев и о характере взаимодействия силовых факторов между элементами пары.
Свободное звено, находящееся в общем случае в М - мерном пространстве, Допускающем П видов простейших движений, обладает числом степеней свобода! (Н) или W - подвижно.
Так, если звено находится в трехмерном пространстве, допускающем шесть видов Простейших движений - три вращательных и три поступательных вокруг и вдоль осей X, V, Z, то говорят, что оно обладает шестью степенями свободы или имеет шесть обобщенных координат, или шестиподвижно. Если звено находится в двухмерном пространстве, допускающем три вида простейших движений - одно вращательное вокруг Z и два поступательных вдоль осей X и Y, то говорят, что оно имеет три степени свободы, или три обобщенные координаты, или оно трехподвижно и т. д..
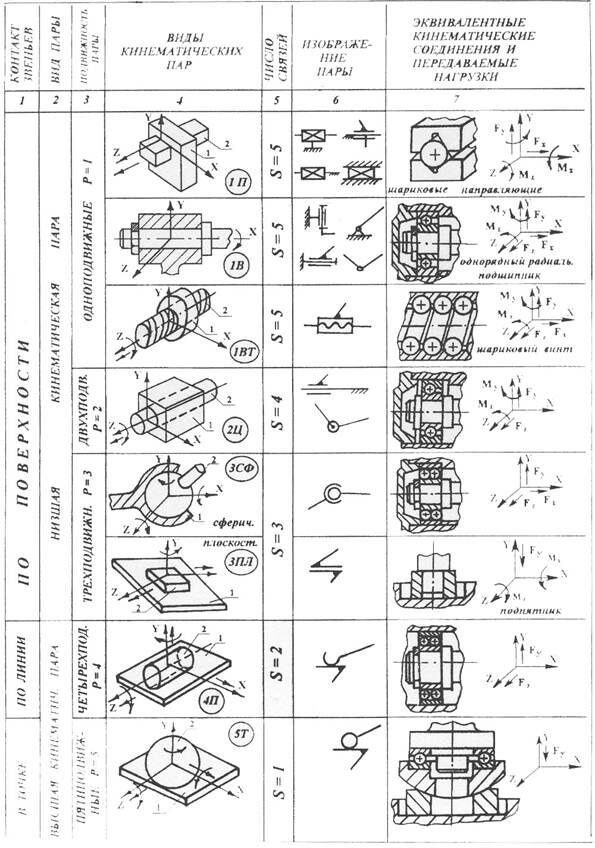
Таблица 2.1
При объединении звеньев с помощью кинематических пар они лишаются степеней свободы. Значит, кинематические пары налагают на соединяемые ими звенья связи числом S.
В зависимости от числа степеней свободы, которым обладают в относительном движении звенья, объединенные в кинематическую пару, определяют подвижность пары (W=Н). Если Н - число степеней свободы звеньев кинематической пары в относительном движении, to подвижность пары определится следующим образом:

где П - подвижность пространства, в котором .существует рассматриваемая пара; S - число налагаемых парой связей.
Следует заметить, что подвижность пары W, определенная по (2.1), зависит не от вида пространства, в котором она реализуется, а только от конструкции.
Например, вращательная (поступательная) (см, табл. 2.1) пара как в шести-, так и в трехподвижном пространстве, все равно останется одноподвижной, в первом случае на нее будет наложено 5 связей, а во втором случае - 2 связи, и, значит, будем иметь, соответственно:
для шестиподвижного пространства:

для трехподвижного пространства:

Как видим, подвижность кинематических пар не зависит от характеристик пространства, что является преимуществом данной классификации. Напротив, часто встречающееся деление кинематических пар на классы страдает тем, что класс пары зависит от Характеристик пространства, а значит, одна и та же пара в разных пространствах имеет разный класс. Это неудобно для практических целей, значит, такая Классификация кинематических пар нерациональна, поэтому ее лучше не применять.
Можно подобрать такую форму элементов пары, чтобы при одном независимом простейшем движений возникало второе - зависимое (производное). Примером такой кинематической пары является винтовая (табл. 2.1). В этой паре вращательное движение винта (гайки) вызывает поступательное его (ее) перемещение вдоль оси. Такую пару следует отнести к одноподвижной, Так как в ней реализуется всего одно независимое простейшее Движение.
Кинематические соединения.
Кинематические пары, приведенные в табл. 2.1, просты и компактны. Они реализуют практически все, необходимые при создании механизмов простейшие относительные перемещения звеньев. Однако при создании машин и механизмов они применяются редко. Это обусловлено тем, что в точках соприкосновения звеньев, образующих пару, обычно возникают большие силы Трения. Это приводит к значительному износу элементов пары, а значит, к ее разрушению. Поэтому простейшую двухзвенную кинематическую цепь кинематической пары часто заменяют более длинными кинематическими цепями, Которые в совокупности реализуют то же самое относительное движение звеньев, что и заменяемая кинематическая пара.
Кинематическая цепь, предназначенная для замены кинематической пары, называется кинематическим соединением.
Приведем примеры кинематических цепей, для наиболее распространенных на практике вращательной, поступательной, винтовой, сферической и плоскость-плоскость кинематических пар.
Из табл. 2.1 видно, что простейшим аналогом вращательной кинематической пары является подшипник с телами качения. Аналогично, роликовые направляющие заменяют поступательную пару и т.д.
Кинематические соединения удобнее и надежнее в эксплуатации, выдерживают значительно большие силы (моменты) и позволяют механизмам работать при высоких относительных скоростях звеньев.
Основные виды механизмов.
Механизм Можно рассматривать как частный случай кинематической цепи, у которой, как минимум, одно звено обращено в стойку, а движение остальных звеньев определено заданным движением входных звеньев.
Отличительными особенностями кинематической цепи, представляющей механизм, являются подвижность и определенность движения ее звеньев относительно стойки.
Механизм может иметь несколько входных и одно выходное звено, в этом случае он называется суммирующим механизмом, и, наоборот, одно входное и несколько выходных, тогда он называется дифференцирующим механизмом.
По назначению Механизмы разделяются на направляющие и передаточные.
Передаточным механизмом называется устройство, предназначенное для воспроизведения заданной функциональной зависимости между перемещениями входного и выходного звеньев.
Направляющим механизмом называют механизм, у которого траектория определенной точки звена, образующего кинематические пары только с подвижными звеньями, совпадает с заданной кривой.
Рассмотрим основные виды механизмов, нашедших широкое применение в технике.
Механизмы, звенья которых образуют только низшие кинематические пары, называют шарнирно-рычажными. Эти механизмы нашли широкое применение благодаря тому, что они долговечны, надежны и просты в эксплуатации. Основным представителем таких Механизмов является шарнирный четырехзвенник (рис.2.1).
 Названия механизмов обычно определяются по названиям их входного и выходного звеньев или характерного звена, входящего в их состав.
Названия механизмов обычно определяются по названиям их входного и выходного звеньев или характерного звена, входящего в их состав.
 В зависимости от законов движения входного и выходного звеньев этот механизм может называться кривошипно-коромысловым, двойным кривошипным, двойным коромысловым, коромыслово-кривошипным.
В зависимости от законов движения входного и выходного звеньев этот механизм может называться кривошипно-коромысловым, двойным кривошипным, двойным коромысловым, коромыслово-кривошипным.
Шарнирный четырехзвенник применяется в станкостроении, приборостроении, а также в сельскохозяйственных, пищевых, снегоуборочных и других машинах.
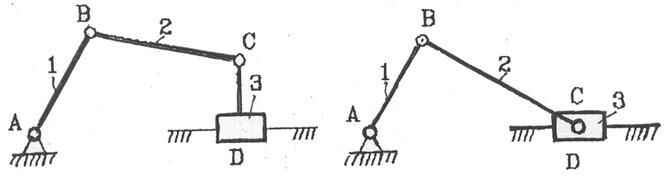 |
Если заменить в шарнирном четырехзвеннике вращательную пару, например D, на поступательную, то получим широко известный кривошипно-ползунный механизм (рис. 2.2).
Рис. 2.2. Различные виды кривошипно-ползунных механизмов:
1 – кривошип 2 - шатун; 3 - ползун
Кривошипно-ползунный (ползунно-кривошипный) механизм нашел широкое применение в компрессорах, насосах, двигателях внутреннего сгорания и других машинах.
Заменив в шарнирном четырехзвеннике вращательную пару С на поступательную, получим кулисный механизм (рис. 2.3).
На pиc.2.3, в кулисный механизм получен из шарнирного четырехзвенника путем замены в нем вращательных пар С и О на поступательные.
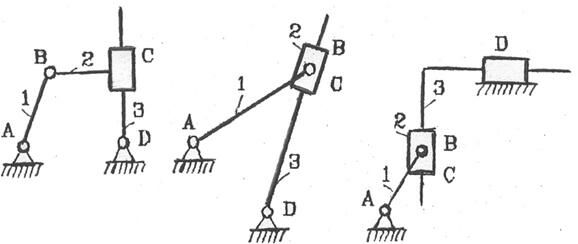 |
Кулисные механизмы нашли широкое применение в строгальных станках благодаря присущему им свойству асимметрии рабочего и холостого хода. Обычно у них длительный рабочий ход и быстрый, обеспечивающий возврат резца в исходное положение холостой ход.
Рис. 2.3. Различные виды кулисных механизмов:
1 – кривошип; 2 – камень; 3 – кулиса.
Большое применение шарнирно-рычажные механизмы нашли в робототехнике (рис. 2.4).
Особенностью этих механизмов является то, что они обладают большим числом степеней свободы, а значит, имеют много приводов. Согласованная работа приводов входных звеньев обеспечивает перемещение схвата по рациональной траектории и в заданное место окружающего пространства.

 Широкое применение в технике получили кулачковые механизмы. При помощи кулачковых механизмов конструктивно Наиболее просто можно Получить практически любое движение ведомого звена по заданному закону,
Широкое применение в технике получили кулачковые механизмы. При помощи кулачковых механизмов конструктивно Наиболее просто можно Получить практически любое движение ведомого звена по заданному закону,
В настоящее время существует большое число разновидностей кулачковых механизмов, некоторые из которых представлены на рис. 2.5.

 |
Необходимый закон движения выходного звена кулачкового механизма достигается за счет придания входному звену (кулачку) соответствующей формы. Кулачок может совершать вращательное (рис. 2.5, а, б), поступательное (рис. 2.5, в, г) или сложное движение. Выходное звено, если оно совершает поступательное движение (рис.2.5, а, в), называют толкателем, а если качательное (рис. 2.5, г) - коромыслом. Для снижения потерь на трение в высшей кинематической паре В применяют дополнительное звено-ролик (рис. 2.5, г).
Кулачковые механизмы применяются как в рабочих машинах, так и в разного рода командоаппаратах.
 |
Очень часто в металлорежущих станках, прессах, различных приборах и измерительных устройствах применяются винтовые механизмы, простейший из которых представлен на рис. 2.6:
Рис. 2.6 Винтовой механизм:
1 - винт ; 2 - гайка; А, В, С - кинематические пары
Винтовые механизмы обычно применяются там, где необходимо преобразовать вращательное движение в взаимозависимое поступательное или наоборот. Взаимозависимость движений устанавливается правильным подбором геометрических параметров винтовой пары В.
Клиновые механизмы (рис.2.7) применяются в различного вида зажимных устройствах и приспособлениях, в которых требуется создать большое усилие на выходе при ограниченных силах, действующих на входе. Отличительной особенностью этих механизмов являются простота и надежность конструкции.
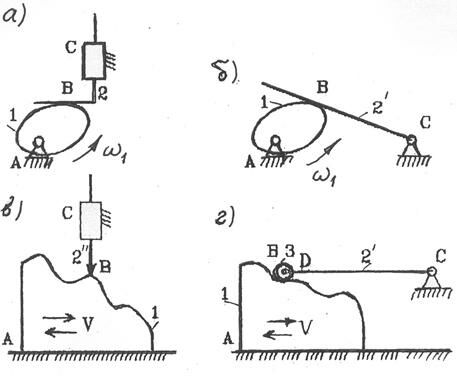
Механизмы, в которых передача движения между соприкасающимися телами осуществляется за счет сил трения, называются фрикционными. Простейшие трехзвенные фрикционные механизмы представлены на рис. 2.8
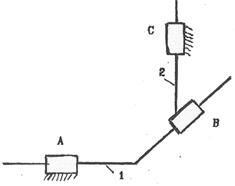
Рис. 2.7 Клиновый механизм:
1, 2 - звенья; Л, В, С - кинематические пиры.
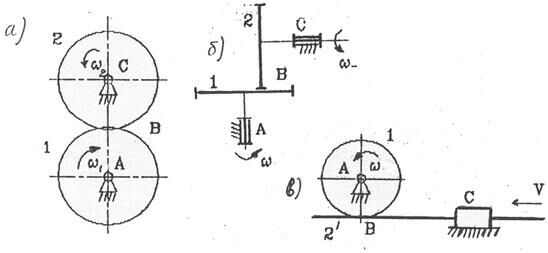
Рис. 2.8 Фрикционные механизмы:
а - фрикционный механизм с параллельными осями; б - фрикционный механизм с пересекающимися» осями; в - реечный фрикционный механизм; 1 - входной ролик (колесо);
2 – выходной ролик (колесо); 2'- рейка
Вследствие того что звенья 1 и 2 прижиты друг к другу, по линии касания между ними возникает сила трения, которая увлекает за собой ведомое звено 2.
Широкое применение фрикционные передачи получили в приборах, лентопротяжных механизмах, вариаторах (механизмах с плавной регулировкой числа оборотов).
Для передачи вращательного движения по заданному закону между валами с параллельными, пересекающимися и перекрещивающимися осями применяются различного вида зубчатые механизмы. При помощи зубчатых колес можно осуществлять передачу движения как между валами с неподвижными осями, так и с перемещающимися в пространстве.
Зубчатые механизмы применяют для изменения частоты и направления вращения выходного звена, суммирования или разделения движений.
 |
На рис. 2.9 показаны основные представители зубчатых передач с неподвижными осями.
Рис 2.9. Зубчатые передачи с неподвижными осями:
а - цилиндрическая; б - коническая; в - торцовая; г - реечная;
1 - шестерня; 2 - зубчатое колесо; 2 * рейка
Меньшее из двух зацепляющихся зубчатых колес называют шестерней, а большее - зубчатым колесом.
Рейка является частным случаем зубчатого колеса у которого радиус кривизны равен бесконечности.
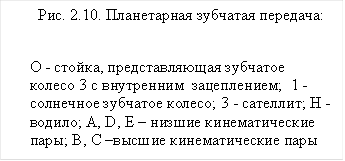
Если в зубчатой передаче имеются зубчатые колесе с подвижными осями, то их называют планетарными (рис. 2.10):
Планетарные зубчатые передачи но сравнению с передачами с неподвижными осями позволяют передавать большие мощности и передаточные числа при меньшем числе зубчатых колес. Они также широко применяются при создании суммирующих и дифференциальных механизмов.
Передача движений между перекрещивающимися осями осуществляется с помощью червячной передачи (рис. 2.11).
 Червячная передача получается из передачи винт-гайка путем продольной разрезки гайки и ее двукратного сворачивания во взаимно перпендикулярных плоскостях. Червячная передача обладает свойством самоторможения и позволяет в одной ступени реализовывать большие передаточные отношения.
Червячная передача получается из передачи винт-гайка путем продольной разрезки гайки и ее двукратного сворачивания во взаимно перпендикулярных плоскостях. Червячная передача обладает свойством самоторможения и позволяет в одной ступени реализовывать большие передаточные отношения.
Рис. 2.11. Червячная передача:
1 - червяк, 2 - червячное колесо.
 К зубчатым механизмам прерывистого движения относятся также механизм мальтийского креста. На рис. З-Л'2. показан механизм четырех лопастного "мальтийского креста".
К зубчатым механизмам прерывистого движения относятся также механизм мальтийского креста. На рис. З-Л'2. показан механизм четырех лопастного "мальтийского креста".
Механизм "мальтийского креста" преобразует непрерывное вращения ведущего эвена - кривошипа 1 с цевкой 3 в прерывистое вращение "креста" 2, Цевка 3 без удара входит в радиальный паз "креста" 2 и поворачивает его на угол  , где z -число пазов.
, где z -число пазов.
 Для осуществления движения только в одном направлении применяют храповые механизмы. На рис.2,13 показан храповый механизм, состоящий из коромысла 1, храпового колеса 3 н собачек 3 и 4.
Для осуществления движения только в одном направлении применяют храповые механизмы. На рис.2,13 показан храповый механизм, состоящий из коромысла 1, храпового колеса 3 н собачек 3 и 4.
 При качаниях коромысла 1 качающаяся собачка 3 сообщает вращение храповому колесу 2 только при движении коромысла против часовой стрелки. Для удержания колеса 2 от самопроизвольного поворота па часовой стрелке при движении коромысла против хода часов служит стопорная собачка 4.
При качаниях коромысла 1 качающаяся собачка 3 сообщает вращение храповому колесу 2 только при движении коромысла против часовой стрелки. Для удержания колеса 2 от самопроизвольного поворота па часовой стрелке при движении коромысла против хода часов служит стопорная собачка 4.
Мальтийские и храповые механизмы широко применяются в станках и приборах,
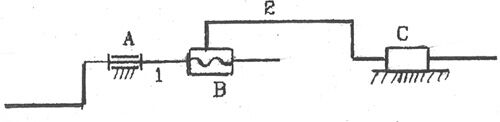
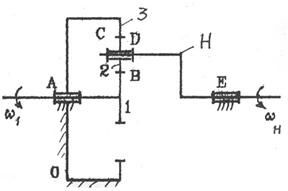
 Если необходимо передать на относительно большое расстояние механическую энергию из одной точки пространства а другую, то применяют механизмы с гибкими звеньями.
Если необходимо передать на относительно большое расстояние механическую энергию из одной точки пространства а другую, то применяют механизмы с гибкими звеньями.
В качестве гибких звеньев, передающих движение от одного эвена механизма к другому, используются ремни, канаты, цепи, нити, ленты, шарики и т.п.,
На рис. 2.14 приведена структурная схема простейшего механизма с гибким звеном.
Передачи с гибкими звеньями широко применяются в машиностроении, приборостроении и в других отраслях промышленности.
 Выше были рассмотрены наиболее типичные простейшие механизмы. механизмов приводятся и специальной Литературе, па-свидетельствах и справочниках, например таких, как [7, 9, 14].
Выше были рассмотрены наиболее типичные простейшие механизмы. механизмов приводятся и специальной Литературе, па-свидетельствах и справочниках, например таких, как [7, 9, 14].
Структурные формулы механизмов.
Существуют общие закономерности в структуре (строении) самых различных механизмов, связывающие число степеней свободы W механизма с числом звеньев и числом и видом его кинематических пар. Эти закономерности носят название структурных формул механизмов.
Для пространственных механизмов в настоящее время наиболее распространена формула Малышева, вывод которой производится следующим образом.
Пусть в механизме, имеющем m звеньев (включая, стойку),  - число одно-, двух-, трех-, четырех- и пятиподвижных пар. Число подвижных звеньев обозначим
- число одно-, двух-, трех-, четырех- и пятиподвижных пар. Число подвижных звеньев обозначим  . Если бы все подвижные звенья были свободными телами, общее число степеней свободы было бы равно 6n. Однако каждая одноподвижная пара V класса накладывает на относительное движение звеньев, образующих пару, 5 связей, каждая двухподвижная пара IV класса - 4 связи и т. д. Следовательно, общее число степеней свободы, равное шести, будет уменьшено на величину
. Если бы все подвижные звенья были свободными телами, общее число степеней свободы было бы равно 6n. Однако каждая одноподвижная пара V класса накладывает на относительное движение звеньев, образующих пару, 5 связей, каждая двухподвижная пара IV класса - 4 связи и т. д. Следовательно, общее число степеней свободы, равное шести, будет уменьшено на величину

где  - подвижность кинематической пары,
- подвижность кинематической пары,  - число пар, подвижность которых равна i. В общее число наложенных связей может войти некоторое число q избыточных (повторных) связей, которые дублируют другие связи, не уменьшая подвижности механизма, а только обращая его в статически неопределимую систему [12]. Поэтому число степеней свободы пространственного механизма, равное числу степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Малышева:
- число пар, подвижность которых равна i. В общее число наложенных связей может войти некоторое число q избыточных (повторных) связей, которые дублируют другие связи, не уменьшая подвижности механизма, а только обращая его в статически неопределимую систему [12]. Поэтому число степеней свободы пространственного механизма, равное числу степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Малышева:

или в краткой записи
 (2.2)
(2.2)
при  механизм – статически определимая система, при
механизм – статически определимая система, при  - статически неопределимая система.
- статически неопределимая система.
В общем случае решение уравнения (2.2) - трудная задача, поскольку неизвестны W и q; имеющиеся способы решений сложны и не рассматриваются в данной лекции. Однако в частном случае, если W, равное числу обобщенных координат механизма, найдено из геометрических соображений, из этой формулы можно найти число избыточных связей (см. Решетов Л. Н. Конструирование рациональных механизмов. М., 1972)
 (2.3)
(2.3)
и решить вопрос о статической определимости механизма; или же, зная, что механизм статически определимый, найти (или проверить) W.
Важно заметить, что в структурные формулы не входят размеры звеньев, поэтому при структурном анализе механизмов можно предполагать их любыми (в некоторых пределах). Если избыточных связей нет (), сборка механизма происходит без деформирования звеньев, последние как бы самоустанавливаются; поэтому такие механизмы называют самоустанавливающимися [12] . Если избыточные связи есть (), то сборка механизма и движение его звеньев становятся возможными только при деформировании последних.
Для плоских механизмов без избыточных связей структурная формула носит имя П. Л. Чебышева, впервые предложившего её в 1869 году для рычажных механизмов с вращательными парами и одной степенью свободы. В настоящее время формула Чебышева распространяется на любые плоские механизмы и выводится с учетом избыточных связей следующим образом
Пусть в плоском механизме, имеющем т звеньев (включая стойку), -число подвижных звеньев,  - число низших пар и
- число низших пар и  - число высших пар. Если бы все подвижные звенья были свободными телами, совершающими плоское движение, общее число степеней свободы было бы равно Зn. Однако каждая низшая пара накладывает на относительное движение звеньев, образующих пару, две связи, оставляя одну степень свободы, а каждая высшая пара накладывает одну связь, оставляя 2 степени свободы.
- число высших пар. Если бы все подвижные звенья были свободными телами, совершающими плоское движение, общее число степеней свободы было бы равно Зn. Однако каждая низшая пара накладывает на относительное движение звеньев, образующих пару, две связи, оставляя одну степень свободы, а каждая высшая пара накладывает одну связь, оставляя 2 степени свободы.
В число наложенных связей может войти некоторое число  избыточных (повторных) связей, устранение которых не увеличивает подвижности механизма. Следовательно, число степеней свободы плоского механизма, т. е. число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Чебышева:
избыточных (повторных) связей, устранение которых не увеличивает подвижности механизма. Следовательно, число степеней свободы плоского механизма, т. е. число степеней свободы его подвижной кинематической цепи относительно стойки, определяется по следующей формуле Чебышева:
 (2.4)
(2.4)
Если  известно, отсюда можно найти число избыточных связей
известно, отсюда можно найти число избыточных связей
 (2.5)
(2.5)
Индекс «п» напоминает о том, что речь идет об идеально плоском механизме, или точнее о его плоской схеме, поскольку за счет неточностей изготовления плоский механизм в какой-то мере является пространственным.
По формулам (2.2)-(2.5) проводят структурный анализ имеющихся механизмов и синтез структурных схем новых механизмов.
Структурный анализ и синтез механизмов.
Влияние избыточных связей на работоспособность и надежность машин.
Как было сказано выше, при произвольных (в некоторых пределах) размерах звеньев механизм с избыточными связями () нельзя собрать без деформирования звеньев. Поэтому такие механизмы требуют повышенной точности изготовления, в противном случае в процессе сборки звенья механизма деформируются, что вызывает нагружение кинематических пар и звеньев значительными дополнительными силами (сверх тех основных внешних сил, для передачи которых механизм предназначен). При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиться и привести к заклиниванию звеньев, поэтому с этой точки зрения избыточные связи в механизмах нежелательны.
Что касается избыточных связей в кинематических цепях механизма, то при конструировании машин их следует стремиться устранять или же оставлять минимальное количество, если полное их устранение оказывается невыгодным из-за усложнения конструкции или по каким-либо другим соображениям. В общем случае оптимальное решение следует искать, учитывая наличие необходимого технологического оборудования, стоимость изготовления, требуемые ресурс работы и надежность машины. Следовательно, это весьма сложная задача для каждого конкретного случая.
Методику определения и устранения избыточных связей в кинематических цепях механизмов рассмотрим на примерах.
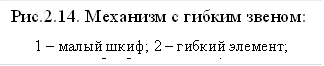
Пусть плоский четырехзвенный механизм с четырьмя одноподвижными вращательными парами ( рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей A и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывается трудностей, а точки B, B’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет, лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация) точки B’ звена 2 вдоль оси х и угловые деформации звена 2 вокруг осей х и z (показаны стрелками). Это означает наличие в механизме трёх избыточных связей, что подтверждается и по формуле (2.3):
рис. 2.15, а) за счет неточностей изготовления (например, вследствие непараллельности осей A и D) оказался пространственным. Сборка кинематических цепей 4, 3, 2 и отдельно 4, 1 не вызывается трудностей, а точки B, B’ можно расположить на оси х. Однако собрать вращательную пару В, образованную звеньями 1 и 2, можно будет, лишь совместив системы координат Bxyz и B’x’y’z’, для чего потребуется линейное перемещение (деформация) точки B’ звена 2 вдоль оси х и угловые деформации звена 2 вокруг осей х и z (показаны стрелками). Это означает наличие в механизме трёх избыточных связей, что подтверждается и по формуле (2.3):  . Что бы данный пространственный механизм был статически определимый, нужна его другая структурная схема, например изображённая на рис. 2.15, б, где
. Что бы данный пространственный механизм был статически определимый, нужна его другая структурная схема, например изображённая на рис. 2.15, б, где  Сборка такого механизма произойдёт без натягов, поскольку совмещение точек В и В’ будет возможно за счёт перемещения точки С в цилиндрической паре.
Сборка такого механизма произойдёт без натягов, поскольку совмещение точек В и В’ будет возможно за счёт перемещения точки С в цилиндрической паре.
Возможен вариант механизма (рис. 2.15, в) с двумя сферическими парами ( ); в этом случае, помимо основной подвижности механизма
); в этом случае, помимо основной подвижности механизма  появляется местная подвижность
появляется местная подвижность  - возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счёт динамических нагрузок. Формула Малышева подтверждает, что такой механизм будет статически определимым:
- возможность вращения шатуна 2 вокруг своей оси ВС; эта подвижность не влияет на основной закон движения механизма и может быть даже полезна с точки зрения выравнивания износа шарниров: шатун 2 может при работе механизма поворачиваться вокруг своей оси за счёт динамических нагрузок. Формула Малышева подтверждает, что такой механизм будет статически определимым:

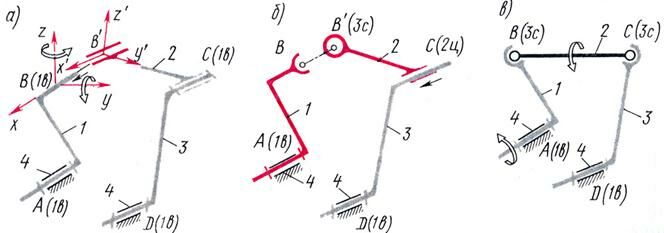
Рис. 2.15
Наиболее простой и эффективный способ устранения избыточных связей в механизмах приборов - применение высшей пары с точечным контактом взамен звена с двумя низшими парами; степень подвижности плоского механизма в этом случае не меняется, поскольку, по формуле Чебышева (при  ):
):
Если Вам понравилась эта лекция, то понравится и эта - Методы диагностики стресс-коррозионных повреждений МТ.

На рис. 2.16, а,б,в дан пример устранения избыточных связей в кулачковом механизме с поступательно движущимся роликовым толкателем. Механизм (рис. 2.16, а) - четырехзвенный ( ); кроме основной подвижности (вращение кулачка 1) имеется местная подвижность (независимое вращение круглого цилиндрического ролика 3 вокруг своей оси); следовательно,
); кроме основной подвижности (вращение кулачка 1) имеется местная подвижность (независимое вращение круглого цилиндрического ролика 3 вокруг своей оси); следовательно,  . Плоская схема избыточных связей не имеет (механизм собирается без натягов,
. Плоская схема избыточных связей не имеет (механизм собирается без натягов,  ). Если вследствие неточностей изготов-ления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1 по формуле Малышева при
). Если вследствие неточностей изготов-ления механизм считать пространственным, то при линейном контакте ролика 3 с кулачком 1 по формуле Малышева при  получим
получим  , но при определенном условии. Кинематическая пара цилиндр - цилиндр (рис. 2.16, 6) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал, и практически сохраняется линейный контакт (при нагружении пятно контакта по форме близко к прямоугольнику), то данная
, но при определенном условии. Кинематическая пара цилиндр - цилиндр (рис. 2.16, 6) при невозможности относительного поворота звеньев 1, 3 вокруг оси z была бы трехподвижной парой. Если же такой поворот вследствие неточности изготовления имеет место, но мал, и практически сохраняется линейный контакт (при нагружении пятно контакта по форме близко к прямоугольнику), то данная
 |
кинематическая пара будет четырехподвижной, следовательно,
 и
и 
Рис.2.17
Снижая класс высшей пары путем применения бочкообразного ролика (пятиподвижная пара с точечным контактом, рис. 2.16, в), получим при и  - механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт.
- механизм статически определимый. Однако при этом следует помнить, что линейный контакт звеньев, хотя и требует при повышенной точности изготовления, позволяет передать большие нагрузки, чем точечный контакт.
На рис.2.16, г, д дан другой пример устранения избыточных связей в зубчатой четырехзвенной передаче ( , контакт зубьев колес 1, 2 и 2, 3 - линейный). В этом случае, по формуле Чебышева,
, контакт зубьев колес 1, 2 и 2, 3 - линейный). В этом случае, по формуле Чебышева,  - плоская схема избыточных связей не имеет; по формуле Малышева,
- плоская схема избыточных связей не имеет; по формуле Малышева,  - механизм статически неопределимый, следовательно, потребуется высокая точность изготовления, в частности для обеспечения параллельности геометрических осей всех трех колес.
- механизм статически неопределимый, следовательно, потребуется высокая точность изготовления, в частности для обеспечения параллельности геометрических осей всех трех колес.
Заменяя зубья промежуточного колеса 2 на бочкообразные (рис. 2.16, д), получим  статически определимый механизм.
статически определимый механизм.


















