
Определение натяжений в тяговом органе конвейера
Лекция 10. Определение натяжений в тяговом органе
конвейера (методика тягового расчета)
Цель тягового расчета – при известных нагрузках на конвейер и коэффициентах сопротивления движению определить необходимую мощность для транспортирования и величину минимального и максимального усилий в тяговом органе по всей длине трассы конвейера.
Потребная мощность двигателя конвейера, кВт,
где Wо= Sнб – Sсб – окружная (тяговая сила), приложена по касательной к окружности приводного элемента (барабан, звездочка), требуется для преодоления всех сопротивлений движению, Н; Sнб и Sсб – натяжения в набегающей и сбегающей ветвях, Н; v – скорость тягового элемента, м/с; hмех = 0,85 – кпд передаточного механизма.
Для определения полной тяговой силы конвейера пользуются методом последовательного обхода трассы по контуру или, что есть то же самое, обхода по точкам сопряжений прямолинейных и криволинейных участков трассы.
Пронумеровав точки сопряжений (рис. 10.1, а), начиная от точки сбегания тягового элемента с привода конвейера к точке набегания, находят последовательно натяжения во всех точках, и по разности натяжений на набегающей и сбегающей ветвях определяют тяговую силу.
Во всех случаях удобно начинать обход трассы от точки сбегания тягового элемента с привода.
Рекомендуемые материалы
При определении натяжения во всех точках контура пользуются общим правилом.
Натяжение тягового элемента в каждой последующей по ходу точке трассы равно сумме натяжения в предыдущей точке и сопротивления на участке между этими точками, т. е.
Si+1 = Si + Wi – (i+1).
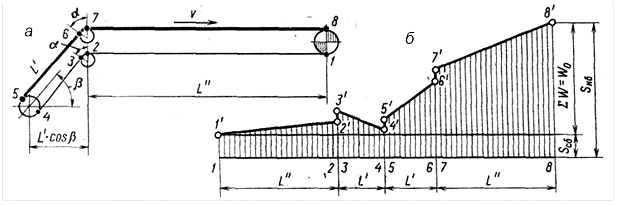
Рис. 10.1. К определению натяжений в ленте: а – cхема трассы конвейера с гибким тяговым органом; б – график изменения натяжения в ленте – тяговая диаграмма конвейера
Тяговые расчеты обычно сопровождаются построением диаграммы натяжений (рис. 10.1, б), в которой графически изображаются полученные натяжения и законы их изменения.
Так как длина прямолинейных участков много больше размеров направляющих и поддерживающих устройств (блоки, звездочки, шины), то размеры последних в расчет не вводятся, и их считают сосредоточенными.
Диаграмма строится от точки 1 сбегания тягового элемента с привода, расположенного в головной части конвейера, в которой возникает усилие S1.
Сопротивление движению на прямолинейных участках
W = ω×qо×L,
где ω – общий коэффициент сопротивления движению, учитывающий и работу подъема, и работу по преодолению сил трения,
ω = sinb + cоcosb,
где cо – коэффициент сопротивления движению на ходовых (поддерживающих) устройствах; qо – погонная нагрузка от веса подвижных частей конвейера, за исключением груза, Н/м; L – длина участка, м.
Кроме этого, в расчете участвуют Cб – коэффициент, учитывающий потери мощности (сопротивление движению тягового органа) при прохождении поворотных участков – отклоняющих, оборотных и концевых барабанов, блоков, звездочек; qг – погонная нагрузка от веса груза, Н/м.
Определяем усилия, Н:
· S1 – усилие пока не известно;
· S2 = S1 + W1–2 = S1 + ω qo×L" = S1 + cо qo×L";
· S3 = Cб × S2;
· S4 = S3 + W3–4 = S3 + ω qo×L' = S3 + qo(– sinb + cоcosb)×L' ;
· S5 = Cб × S4;
· S6 = S5 + W5–6 = S5 + ω(qo + qг)L' = S5 + (qo + qг)×(sinb + cоcosb)×L';
· S7 = Cб ×S6;
· S8 = S7 + W7–8 = S7 + ω(qo + qг)L'' = S7 + (qo + qг)×(sinb + cоcosb)×L''.
Следует отметить, что определение натяжений должно производиться с учетом направления движения тягового органа на наклонных участках. Так, если направление движения совпадает с направлением уклона, т. е. тяговый орган движется вниз, то и сопротивление в данном случае необходимо учитывать со знаком «минус». В этом случае составляющая силы тяжести «помогает» приводу. А на горизонтальных участках в силу того, что потерь мощности на подъем не происходит, учитываются только потери на трение при движении.
В данном случае не рассмотрены сопротивления, которые могут возникать, например, в месте установки загрузочных, очистных, разгрузочных и других устройств. При расчете конкретной машины эти сопротивления должны быть учтены на соответствующих участках трассы конвейера.
В дальнейшем, если выразить все натяжения через первоначальное S1, можно отметить, что усилия на приводном элементе сведутся к соотношению следующего вида:
S8 = a×S1 + b, (10.1)
где а и б – численные коэффициенты после подстановки значений коэффициентов сопротивлений, погонных нагрузок и длин участков.
Далее производится определение всех натяжений в тяговом органе в соответствии с конструкцией конвейера:
– если привод с передачей усилия зацеплением, первоначальное натяжение принимается равным определенной величине;
– если привод фрикционный, с передачей тягового усилия трением, необходимо составить систему уравнений из выражения (10.1) и условия отсутствия проскальзывания ленты по барабану (уравнение Эйлера), откуда определяется усилие S1.
Далее строится тяговая диаграмма, определяется тяговое (окружное) усилие на приводном элементе и рассчитывается требуемая мощность привода.
Рекомендуем посмотреть лекцию "Требования, предъявляемые к психологу-консультанту и его работе".
КОНТРОЛЬНЫЕ ВОПРОСЫ И ЗАДАНИЯ
1. Каким методом производится уточненный расчет конвейеров с гибким тяговым органом?
2. Сформулируйте правило определения натяжений в тяговом органе конвейера.
3. Как определяется тяговая сила конвейера?
4. Как определяется требуемая мощность привода?
5. Опишите последовательность построения тяговой диаграммы.



















