
Классификация систем автоматического управления
Раздел 1. Автоматизированные системы управления
Тема 1.1 Системы автоматического управления и следящие системы
1. Классификация систем автоматического управления
2. Законы автоматического управления.
3. Системы автоматизированного управления производством
1. Существует большое разнообразие систем автоматического управления. Чтобы как-то разобраться в этом многообразии проводится классификация САУ. Существует несколько признаков, по которым проводится классификация САУ. На рисунке 4 приведена примерная классификация САУ.
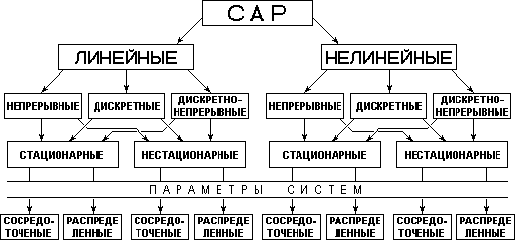
Рисунок 4 - Классификация САУ
Рекомендуемые материалы
Основные признаки классификации САУ:
По назначению, то есть характеру изменения задающего воздействия, различают:
· системы автоматической стабилизации;
· системы программного управления;
· следящие системы.
Стабилизирующая АСУ – система, алгоритм функционирования которой содержит предписание поддерживать значение управляемой величины постоянным:
x(t) ≈ xз = const [1.1]
Знак ≈ означает, что управляемая величина поддерживается на заданном уровне с некоторой ошибкой.
Стабилизирующие АСУ самые распространенные в промышленной автоматике. Их применяют для стабилизации различных физических величин, характеризующих состояние технологических объектов.
Программная АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее заданной функцией времени:
x(t) ≈ xз(t) = fп(t) [1.2]
Следящая АСУ – система, алгоритм функционирования которой содержит предписание изменять управляемую величину в соответствии с заранее неизвестной функцией времени:
x(t) ≈ xз(t) = fс(t) [1.3]
В стабилизирующих, программных и следящих АСУ цель управления заключается в обеспечении равенства или близости управляемой величины x(t) к ее заданному значению xз(t).
Такое управление, осуществляемое с целью поддержания x(t) ≈ xз(t), называется регулированием. Управляющее устройство, осуществляющее регулирование, называется регулятором, а сама система – системой регулирования.
По принципу управления различают:
· Системы с управлением по разомкнутому циклу;
· Системы с управлением по замкнутому циклу;
· Системы комбинированного управления.
Разомкнутая АСУ – система, в которой не осуществляется контроль управляемой величины, т.е. входными воздействиями ее управляющего устройства являются только внешние (задающее и возмущающее) воздействия.

Рисунок 5 - Функциональные схемы САУ с разомкнутой (а, б), замкнутой (в) и комбинированной (г) цепями воздействий
Разомкнутые АСУ можно разделить в свою очередь на два типа:
• осуществляющие управление в соответствии с изменением только задающего воздействия (Рисунок 5, а);
• осуществляющие управление в соответствии с изменением и задающего и возмущающего воздействий (Рисунок 5, б).
Алгоритм управления разомкнутой системы первого типа имеет вид
y(t) = Ay [ xз(t) ] [1.4]
Чаще всего оператор Аy устанавливает пропорциональную связь между задающим воздействием xз(t) и управляющим воздействием y(t), а сама система в этом случае осуществляет программное управление.
Системы первого типа работают эффективно лишь при условии, если влияние возмущений на управляемую величину невелико и все элементы разомкнутой цепи обладают достаточно стабильными характеристиками.
В системах управления по возмущению (Рисунок 5, б) управляющее воздействие зависит от возмущающего и задающего воздействий:
y(t) = Ay [ xз(t), z(t) ] [1.5]
В большинстве случаев разомкнутые системы управления по возмущению выполняют функции стабилизации управляемой величины.
Преимущество разомкнутых систем управления по возмущению – их быстродействие: они компенсируют влияние возмущения еще до того, как оно проявится на выходе объекта. Но применимы эти системы лишь в том случае, если на управляемую величину действуют одно или два возмущения и есть возможность измерения этих возмущений. Поэтому если эти величины действуют на объект как возмущения, то обычно стремятся стабилизировать их при помощи дополнительной системы или ввести в основную систему управления данным объектом сигнал, пропорциональный такому воздействию.
Замкнутая АСУ (АСУ с обратной связью) – система, в которой входными воздействиями ее управляющего устройства являются как внешнее (задающее), так и внутреннее (контрольное) воздействия.
Управляющее воздействие в замкнутой системе (Рисунок 5, в) формируется в большинстве случаев в зависимости от величины и знака отклонения истинного значения управляемой величины от ее заданного значения:
y(t) = Ay [ ε(t) ], [1.6]
где ε(t) = xз(t) - x (t) – сигнал ошибки (сигнал рассогласования).
Замкнутую систему называют часто системой управления по отклонению. В замкнутой системе контролируется непосредственно управляемая величина и тем самым при выработке управляющего воздействия учитывается действие всех возмущений, влияющих на управляемую величину. В этом заключается преимущество замкнутых систем.
Комбинированная АСУ – система, в которой входными воздействиями ее управляющего устройства являются как внешние (задающее и возмущающее), так и внутреннее (контрольное) воздействия.
В комбинированных системах (Рисунок 5, г) имеется две цепи воздействий – по заданию и по возмущению, и управляющее воздействие формируется согласно оператору.
y(t) = Aз [ ε(t) ] + Aв [ z(t) ] [1.7]
Эффективность работы комбинированной АСУ всегда больше, чем у порознь функционирующих замкнутой или разомкнутой систем.
По характеру используемых для управления сигналов различают:
1) непрерывные или аналоговые системы автоматического управления;
2) дискретные САУ, из которых выделяет:
· импульсные системы автоматического управления;
· релейные системы автоматического управления;
· цифровые системы автоматического управления.
Непрерывная АСУ – АСУ, в которой действуют непрерывные (аналоговые), определенные в каждый момент времени сигналы.
Дискретная АСУ - АСУ, в которой действует хотя бы один дискретный, определенный только в некоторые моменты времени сигнал.
К дискретным АСУ относятся, например, АСУ, имеющие в своем составе цифровые вычислительные устройства: микропроцессоры, контроллеры, электронные вычислительные машины.
По характеру используемой информации об условиях работы различают:
1. системы автоматического управления с жестким законом управления и структурой;
2. системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся:
· системы автоматической настройки;
· самообучающие системы;
· самоорганизующие системы.
По характеру математических соотношений различают:
1) линейные системы автоматического управления, для которых справедлив принцип суперпозиции;
2) нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив.
Линейные АСУ – АСУ, все элементы которых описываются линейными дифференциальными и/или алгебраическими уравнениями.
Нелинейные АСУ – АСУ, хотя бы один элемент которой описывается нелинейными дифференциальными и/или алгебраическими уравнениями.
Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется.
Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами.
По количеству выходных координат объекта управления различают:
1. одномерные системы автоматического управления;
2. многомерные системы автоматического управления.
Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин.
По способу выработки управляющего воздействия замкнутые АСУ разделяют на: • беспоисковые;
• поисковые.
Беспоисковая АСУ – АСУ, в которой управляющее воздействие вырабатывается в результате сравнения истинного значения управляемой величины с заданным значением.
Такие системы применяют для управления сравнительно несложными объектами, характеристики которых достаточно хорошо изучены и для которых заранее известно в каком направлении и на сколько нужно изменить управляющее воздействие при определенном отклонении управляемой величины от заданного значения.
Поисковая АСУ – АСУ, в которой управляющее воздействие формируется с помощью пробных управляющих воздействий и путем анализа результатов этих пробных воздействий.
Такую процедуру поиска правильного управляющего воздействия приходится применять в тех случаях, когда характеристики объекта управления меняются или известны не полностью; например, известен вид зависимости управляемой величины от управляющего воздействия, но неизвестны числовые значения параметров этой зависимости.
Поэтому поисковые системы называют еще системами с неполной информацией. Наиболее часто принцип автоматического поиска управляющих воздействий применяют для управления объектами, характеристики которых имеют экстремальный характер. Целью управления является отыскание и поддержание управляющих воздействий, соответствующих экстремальному значению управляемой величины. Такие поисковые системы называют экстремальными (оптимальными) системами.
Особый класс АСУ образуют системы, которые способны автоматически приспосабливаться к изменению внешних условий и свойств объекта управления, обеспечивая при этом необходимое качество управления путем изменения структуры и параметров управляющего устройства. Они называются адаптивными (самоприспосабливающимися) системами. В составе адаптивной АСУ имеется дополнительное автоматическое устройство, которое меняет алгоритм управления основного управляющего устройства таким образом, чтобы АСУ в целом осуществляла заданный алгоритм функционирования, который предписывает обычно максимизацию показателя качества. Поэтому адаптивные АСУ являются, как правило, еще и оптимальными.
По степени зависимости управляемой величины в установившемся режиме от величины возмущающего воздействия АСУ делят на:
• статические;
• астатические.
Статическая АСУ – АСУ, в которой имеется зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия.
Астатическая АСУ – АСУ, в которой отсутствует зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия.
В зависимости от принадлежности источника энергии, при помощи которого создается управляющее воздействие, различают АСУ:
• прямого действия;
• непрямого действия.
АСУ прямого действия – АСУ, в которой управляющее воздействие создается при помощи энергии объекта управления.
К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т. п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан).
АСУ непрямого действия – АСУ, в которой управляющее воздействие создается за счет энергии дополнительного источника.
2. Алгоритм функционирования устройства (системы) – совокупность предписаний, ведущих к правильному выполнению технического процесса в каком-либо устройстве или в совокупности устройств (системе).
К алгоритмам функционирования относятся:
1) Алгоритм стабилизации, который требует постоянства вектора выходного состояния ОУ Y(t) и равенство его заданному значению Yz.
Yz=const [1.8]
При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования.
2) Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть
Yz(t)=Fz(t) [1.9]
Примером использования такого алгоритма являются системы числового программного управления.
3) Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением:
Yz(t)=F0(t), [1.10]
где F0(t)– неопределенная функция времени.
Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону. Например, системы компенсации износа режущего инструмента.
Графическое представление алгоритмов функционирования для вектора выходного состояния, содержащего только одну компоненту, представлено на рисунке 6.

Стабилизация Программный Следящий
Рисунок 6 - Алгоритмы функционирования ОУ.
Алгоритм управления – совокупность предписаний, определяющая характер воздействий извне на объект управления, обеспечивающих его алгоритм функционирования. Алгоритм функционирования управляющего устройства – зависимость управляющего воздействия от задающего воздействия, управляемой величины и дополнительного возмущающего воздействия.
Для одномерной АСУ алгоритм управления можно записать следующим образом:
y(t) = Ау[ xз(t), x(t), zд(t)] [1.11]
Алгоритм функционирования объекта управления – зависимость управляемой величины от управляющего и основного возмущающего воздействий.
Для одномерной АСУ алгоритм функционирования объекта можно записать следующим образом:
x(t) = Ао[ y(t), zо(t)] [1.12]
Алгоритм функционирования объекта и алгоритм управления в совокупности образуют алгоритм функционирования АСУ.
Алгоритмическая структура (схема) – структура (схема), представляющая собой совокупность взаимосвязанных алгоритмических звеньев и характеризующая алгоритмы преобразования информации в АСУ.
При этом, алгоритмическое звено - часть алгоритмической структуры АСУ, соответствующая определенному математическому или логическому алгоритму преобразования сигнала.
Если алгоритмическое звено выполняет одну простейшую математическую или логическую операцию, то его называют элементарным алгоритмическим звеном. На схемах алгоритмические звенья изображают прямоугольниками, внутри которых записывают соответствующие операторы преобразования сигналов. Иногда вместо операторов в формульном виде приводят графики зависимости выходной величины от входной или графики переходных функций.
Различают следующие виды алгоритмических звеньев:
• статическое; • динамическое;• арифметическое;• логическое.
Статическое звено – звено, преобразующее входной сигнал в выходной мгновенно (без инерции). Связь между входным и выходным сигналами статического звена описывается обычно алгебраической функцией. К статическим звеньям относятся различные безинерционные преобразователи, например, резистивный делитель напряжения.
Динамическое звено – звено, преобразующее входной сигнал в выходной в соответствии с операциями интегрирования и дифференцирования во времени. Связь между входным и выходным сигналами динамического звена описывается обыкновенными дифференциальными уравнениями.
К классу динамических звеньев относятся элементы АСУ, обладающие способностью накапливать какой-либо вид энергии или вещества, например, интегратор на основе электрического конденсатора.
Арифметическое звено – звено, осуществляющее одну из арифметических операций: суммирование, вычитание, умножение, деление.
Наиболее часто встречающееся в автоматике арифметическое звено – звено, выполняющее алгебраическое суммирование сигналов, называют сумматором.
Логическое звено – звено, выполняющее какую-либо логическую операцию: логическое умножение («И»), логическое сложение («ИЛИ»), логическое отрицание («НЕ») и т.д. Входной и выходной сигналы логического звена являются обычно дискретными и рассматриваются как логические переменные.
Конструктивная структура (схема) – структура (схема), отражающая конкретное схемное, конструктивное и прочее исполнение АСУ.
К конструктивным схемам относятся: кинематические схемы устройств, принципиальные и монтажные схемы электрические соединений и т. д.
3. Автоматические системы, применяемые при автоматизации производственных процессов, в зависимости от характера и объема операций, выполняемых ими, можно разделить на системы автоматического контроля, автоматического регулирования, автоматического управления, следящие, автоматической защиты, адаптивные и т.д. Автоматические системы могут быть комбинированными, т.е. представлять собой совокупность нескольких систем. Например, система автоматического регулирования представляет собой совокупность систем автоматического контроля и управления. Автоматические системы могут также различаться видами применяемых в них устройств, параметрами, конструктивными решениями и т.д.
Следящая система – автоматическая система, в которой выходная величина воспроизводит с определенной точностью входную величину, характер изменения которой заранее не известен.
Следящие системы используют для различных целей. В качестве выходной величины следящей системы можно рассматривать совершенно различные величины. Одной из наиболее широко распространенных разновидностей следящих систем являются системы управления положением объектов. Такие системы можно рассматривать как дальнейшее развитие и усовершенствование систем дистанционной передачи угловых или линейных перемещений, в которых регулируемой величиной обычно является угол поворота объекта.
Следящая система представлена на рисунке 7.
 |
Рисунок 7 – Функциональная схема следящей системы
На элемент сравнения (ЭС) от задающего элемента (ЗЭ), связанного с входным валом следящей системы, поступает входная величина αвх. Сюда же от объекта управления (ОУ), связанного с выходным валом системы, поступает значение угла обработки αвых. В результате сравнения этих величин на выходе элемента сравнения появляется рассогласование Ө=αвх- αвых
Сигнал рассогласования с выхода элемента сравнения поступает на преобразователь (Пр), в котором угол Ө преобразуется в пропорциональное ему напряжение U0 – сигнал ошибки.
Однако в большинстве случаев мощность сигнала ошибки недостаточна для приведения в действие исполнительного двигателя (М). Поэтому между преобразователем и исполнительным двигателем включают усилитель (У), обеспечивающий необходимое усиление сигнала ошибки по мощности. Усиленное напряжение с выхода усилителя поступает на М , который приводит в действие объект управления, а перемещение αвых последнего передается на принимающий элемент измерительной схемы, т.е. на элемент сравнения.
Адаптивная (самоприспосабливающаяся) система – система автоматического управления, у которой автоматически изменяется способ функционирования управляющей части для осуществления в каком-либо смысле наилучшего управления. В зависимости от поставленной задачи и методов ее решения возможны различные законы управления, поэтому адаптивные системы разделяют на следующие виды:
- адаптивные системы функционального регулирования, где управляющее воздействие является функцией какого-либо параметра, например, подача – функция одной из составляющих силы резания, скорость резания – функция мощности;
- адаптивные системы предельного (экстремального) регулирования, которые обеспечивают поддержание предельного значения одного или нескольких параметров в объекте;
- адаптивные системы оптимального регулирования, в которых учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. В соответствии с этим критерием осуществляется изменение регулируемых параметров и величин, например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяется заданием оптимальных значений параметров (скоростей сил резания, температуры и т.д.), от которых зависят производительность и себестоимость процесса обработки.
Тема 1.2 Системы автоматического регулирования
1. Состав системы автоматического регулирования
2. Классификация систем регулирования производством
3. Типовые динамические звенья САР и их характеристики
4. Устойчивость систем автоматического регулирования.
1. Система автоматического регулирования (САР) – совокупность объекта управления и автоматического регулятора, взаимодействующих между собой в соответствии с алгоритмом управления.
Автоматическим регулированием называют поддержание значений физических величин на определенном уровне или изменение их по требуемому закону без непосредственного участия человека.
Технические устройства, в которых процессы подлежат автоматическому регулированию, называют объектами регулирования.
Физические величины, подлежащие регулированию, называют регулируемыми величинами.
Внешние воздействия, вызывающие отклонение регулируемой величины от ее заданного значения, называют возмущающими воздействиями.
Технические устройства, предназначенные для автоматического регулирования различных величин в объектах, называют автоматическими регуляторами.
Система автоматического регулирования состоит из двух основных частей - объекта регулирования и автоматического регулятора. САР представляет собой сложные комплексы взаимодействующих технических средств, узлов и элементов, работа которых основана на различных физических принципах (электрических, механических, гидравлических и др.). Они разнообразны по конструктивному исполнению и техническим характеристикам. Однако в теории автоматического регулирования основное внимание уделяется не техническим свойствам отдельных элементов, а их функциональным преобразованиям и характеру связей между ними. Наглядное представление об этом дают функциональные схемы систем автоматического регулирования.
Функциональные схемы отражают взаимодействие устройств, элементов систем автоматического регулирования в процессе их работы. Графически отдельные устройства систем автоматического регулирования изображают в виде прямоугольников, а существующие между ними связи - стрелками, соответствующими направлению прохождения сигнала. Внутреннее содержание каждого устройства не конкретизируется, а функциональное назначение шифруется буквенными символами.
Типовая (или обобщенная) функциональная схема системы автоматического регулирования представлена на рисунке 8.
На объект регулирования ОР, находящийся под влиянием внешнего возмущающего воздействия F, поступает управляющее воздействие хр, которое является выходной величиной автоматического регулятора (АР), представляющего собой совокупность элементов. В автоматический регулятор по цепи главной обратной связи (ОСГ) поступает регулируемая величина хвых. Входная величина хвх с задатчика З поступает на элемент сравнения (ЭС). Сигнал ошибки, представляющий собой разность входной величины хвх и сигнала главной обратной связи хос (Δх=хвх-хос ) поступает на усилитель У, где усиливается в К раз и воздействует на исполнительный элемент (ИЭ), выходной сигнал хр которого является регулирующим воздействием автоматического регулятора. Элемент местной обратной связи (ОСМ) вводится в систему автоматического регулирования для улучшения ее динамических свойств.

Рисунок 8 - Функциональная схема систем автоматического регулирования
2. Классификация систем. Вследствие большого разнообразия используемых в технике систем автоматического регулирования, различающихся функциональными возможностями, принципами построения и формой конструктивной реализации, невозможно дать единую классификацию систем автоматического регулирования.
Рассмотрим наиболее характерные классификационные признаки.
1) Наличие в системах явно выраженной обратной связи: разомкнутые и замкнутые. Замкнутые системы содержат цепь главной обратной связи ОСГ, в разомкнутых системах она отсутствует. Системы, работающие по разомкнутому циклу, используют только в качестве составной части более сложных систем автоматического регулирования. Под главной обратной связью понимают подачу части энергии с выхода системы на ее вход. Главная обратная связь (ОСГ) служит для сравнения действительного закона изменения регулируемого параметра с требуемым.
Помимо главной обратной связи в системе предусмотрена местная обратная связь, которая охватывает один или несколько элементов основной цепи. Обратную связь называют положительной, если ее выходной сигнал суммируется с основным сигналом, и отрицательной, если этот сигнал вычитается из основного сигнала.
2) Закон изменения регулируемой величины в системах автоматического регулирования: системы стабилизации, программного регулирования и следящие. Системы стабилизации предназначены для поддержания постоянного значения регулируемой величины. В этих системах задающее воздействие не изменяется во времени.
Системы программного регулирования предназначены для изменения регулируемой величины по известному закону в функции времени или какой-либо другой величины. Задающее воздействие называют программой регулирования. Следящие системы предназначены для изменения регулируемой величины по заранее неизвестному закону. Задающее воздействие представляет собой случайную функцию времени.
3) Способность САР поддерживать с определенной степенью точности значение регулируемой величины: статические и астатические.
Статической системой автоматического регулирования называют такую систему, в которой принципиально невозможно поддерживать одно и то же значение регулируемого параметра при условии, что задающее воздействие системы остается неизменным. Остаточную ошибку в такой системе называют статизмом.
Астатической системой автоматического регулирования называют такую систему, в которой в установившемся режиме регулируемый параметр принимает всегда одно и то же значение и не зависит от значения возмущающего воздействия на объект регулирования. В астатической системе статизм всегда равен нулю.
4) Функциональная связь между входными и выходными величинами элементов, входящих в состав системы автоматического регулирования: непрерывные и дискретные. Непрерывной системой автоматического регулирования называют систему, в которой непрерывному изменению входных величин элементов соответствует непрерывное изменение выходных величин этих эле-ментов. Дискретной системой автоматического регулирования называют систему, в которой непрерывному изменению входной величины хотя бы одного элемента, входящего в состав системы, соответствует дискретное изменение выходной величины этого элемента.
3. При изучении динамических свойств систем целесообразно рассматривать отдельные ее элементы только с точки зрения их динамических свойств независимо от функциональных преобразований и конструктивных форм исполнения. Одинаковыми динамическими свойствами могут обладать различные элементы независимо от их физической природы. По этому признаку в цепях регулирования принято выделять отдельные элементы или группы элементов, которые называют динамическими звеньями.
Динамическим звеном называют часть системы автоматического регулирования, переходный процесс которой описывается дифференциальным уравнением определенного вида. Динамическим звеном может быть элемент, совокупность элементов и вся система автоматического регулирования в целом.
Графически динамическое звено изображается в виде прямоугольника, внутри которого вписывается выражение передаточной функции W (р), а направление прохождения информации изображается стрелками. Входной и выходной сигналы в динамическом звене могут иметь различную физическую природу.
В теории автоматического регулирования можно выделить следующие типовые динамические звенья - безынерционное (пропорциональное), апериодическое (инерционное), дифференцирующее, интегрирующее, колебательное.
Характеристики динамических звеньев
Зависимость выходной величины звена от входной в установившемся режиме называют статической характеристикой. Установившийся режим — это такой режим, при котором входная и выходная величины остаются постоянными во времени. Статическую характеристику обычно изображают графически. Ее значения можно получать экспериментально или расчетным путем.
Системы автоматического регулирования, как правило, работают в неустановившемся, переходном режиме. Такой режим работы является следствием воздействия на систему непрерывно и случайно изменяющихся внешних возмущающих факторов, приводящих к непрерывному изменению входной и выходной величины во всех ее звеньях. Поэтому одной из важных задач является изучение поведения динамических звеньев в переходных режимах.
Динамической характеристикой звена называют зависимость выходной величины от входной в переходном процессе. Физическая задача определения выходной величины звена при изменяющемся входном сигнале сводится к решению дифференциального уравнения того или иного вида, описывающего протекание переходных процессов в звене.
Дифференциальные уравнения движения динамического звена. В линейных системах автоматического регулирования протекающие процессы описываются линейными дифференциальными уравнениями, решение которых значительно упрощается с использованием методов операционного исчисления.
Решение дифференциального уравнения методом операционного исчисления осуществляется в следующие три этапа;
1) переход от оригиналов к изображениям, т. е. переход от дифференциального уравнения к алгебраическому;
2) отыскание из полученного алгебраического уравнения неизвестной функции Y (р), т. е. решение алгебраического уравнения;
3) переход от найденного изображения Y (р) к оригиналу неизвестной функции.
Дифференциальные уравнения движения звеньев имеют следующий вид:
- безинерционное звено:  [1.13]
[1.13]
- апериодическое:  [1.14]
[1.14]
- дифференцирующее:  [1.15]
[1.15]
- интегрирующее:  [1.16]
[1.16]
- колебательное:  , [1.17]
, [1.17]
где  – постоянная времени звена,
– постоянная времени звена,
 - коэффициент демпфирования.
- коэффициент демпфирования.
Передаточная функция. Передаточной функцией звена называется отношение изображения выходной величины звена к изображению входной величины при нулевых начальных условиях. Обозначим через W (р) передаточную функцию, а через X (р) и Y (р) - соответственно изображения входной и выходной величин, тогда: W(p) = Y (р)/Х (р) [1.18]
Переходная характеристика. Переходной характеристикой (переходным процессом) динамического звена называют зависимость выходной величины от времени при подаче на вход звена ступенчатого сигнала единичной амплитуды. Следовательно, переходная характеристика отображает реакцию звена на единичный ступенчатый сигнал.
Частотные характеристики звеньев. Если на вход динамического звена поступает сигнал синусоидальной формы определенной частоты, то выходной сигнал имеет те же синусоидальную форму и частоту, но другие амплитуду и фазу. В связи с этим различают амплитудно-частотные и фазово-частотные характеристики звеньев.
Амплитудно-частотная характеристика выражает отношение амплитуды колебаний на выходе звена к амплитуде колебаний на его входе в зависимости от частоты выходного сигнала (Рисунок 9, а)
А (ω) = Авых/Авх = f (ω), [1.19]
где Авых - амплитуда выходного сигнала; Авх - амплитуда входного сигнала; ω - угловая частота.

Рисунок 9 - Частотные характеристик звеньев: а- амплитудно-частотная; б - фазово-частотная; в – амплитудно-фазовая
Фазово-частотная характеристика выражает зависимость разности фаз между входными и выходными колебаниями звена от частоты входного сигнала (Рисунок 9, б):
φ = f(ω), [1.20]
где φ - фазовый угол. Опережению фазы соответствует φ>0, а отставанию φ<0.
В теории автоматического регулирования используют комплексную амплитудно-фазовую характеристику (Рисунок 9, в), в которой дают соотношения между амплитудами выходного и входного сигналов и сдвигом фаз при изменении частоты колебаний входного сигнала от 0 до ∞:
W (jω) = Авых/Авх= Авыхej(ωt+φ)/Авхejωt= Авыхejφ/Авх= А(ω)ejφ(ω), [1.21]
где Авыхej(ωt+φ); Авхejωt - соответственно выходной и входной сигналы в символической форме записи.
Существует показательная форма записи:
W (jω) = А(ω)еjφ(ω) [1.22]
Величина А (ω) - изменение отношения амплитуд выходного сигнала к входному, а φ (ω) - изменение фазы колебаний на выходе звена относительно колебаний на входе, происходящих с изменением частоты входного сигнала.
Логарифмической амплитудно-частотной характеристикой (ЛАЧХ) L (ω) называют зависимость модуля частотной характеристики от частоты, представленную в логарифмическом масштабе. Логарифмической фазово-частотной характеристикой (ЛФЧХ) называют зависимость аргумента частотной характеристики от логарифма частоты.
Для построения ЛАЧХ от выражения амплитудно-фазовой характеристики вида W (jω) = А(ω)еjφ(ω) переходят к выражению
L (ω) = 20 lg |W (ω)|= 20 lg A (ω), [1.23]
где L (ω) — в децибелах.
При построении ЛФЧХ по оси ординат откладывают углы в градусах или радианах, по оси абсцисс - частоту со в логарифмическом масштабе в декадах.
4. Необходимым условием работоспособности системы автоматического регулирования является ее устойчивость. Под устойчивостью понимают свойство системы восстанавливать состояние равновесия, из которого она была выведена под влиянием возмущающих факторов, после прекращения действия этих факторов.
На практике для определения устойчивости САР используют критерии устойчивости, т.е. правила, с помощью которых можно определить, устойчива система или не, не прибегая к решению дифференциальных уравнений.
Алгебраический критерий (Рауса-Гурвица) позволяет судить об устойчивости замкнутой системы по коэффициентам ее характеристического уровня, которым является знаменатель передаточной функции. Необходимые и достаточные условия устойчивости определяются различными соотношениями коэффициентов в зависимости от порядка системы.
Критерий устойчивости Михайлова основан на связи характера переходного процесса системы с амплитудой и фазой вынужденных колебаний, устанавливающих в системе при синусоидальном воздействии. Анализ устойчивости системы этим методом сводится к построению по характеристическому многочлену замкнутой системы (знаменатель передаточной функции) комплексной частотной функции, по виду которой можно судить об устойчивости.
Критерий устойчивости Найквиста позволяет судить об устойчивости замкнутой системы САР по амплитудно-фазовой характеристике. Замкнутая система будет устойчива в том случае, если устойчива замкнутая система и ее амлитудно-фазовая характеристика не охватывает точку с координатами (-1, j0), называемую критической. При отсутствии местных обратных связей разомкнутая система всегда устойчива, если состоит из устойчивых звеньев. При наличии местных обратных связей система может оказаться неустойчивой в разомкнутом состоянии.
Устойчивость по логарифмическим частотным характеристикам определяют с использованием критерия устойчивости Найквиста. Замкнутая система устойчива, если на частоте ω, для которой φ=-π, ордината ЛАЧХ разомкнутой системы отрицательна, т.е. L(ω)<0. Если разомкнутая система устойчива, а ЛАЧХ пересекает линию -π в нескольких точках, то замкнутая система будет устойчивой, когда L(ω)<0 при φ=-π для конечной правой из точек пересечения.
Для определения устойчивости системы используют приближенную ЛАЧХ, представляющую собой ломаную линию, отдельные участки которой имеют определенный наклон.
Тема 1.3 Системы автоматического контроля. Автоматизация контрольных измерений в машиностроении.
1. Структура САК, основные понятия.
2. Классификация систем автоматического контроля.
3. Системы пассивного контроля. Автоматические сортировщики
4. Системы активного контроля. Контрольно-измерительные машины.
1. Для обеспечения требуемого качества дет талей и изделий (точность размеров, геометрическая, форма, параметр шероховатости поверхности и т. д.) применяют комплексный контроль, включающий в себя контроль: готовых изделий, заготовок, вспомогательных средств производства (режущего инструмента, измерительных средств и т. д.), основных средств производства (технологического оборудования, систем и средств управления и т. д.).
Система автоматического контроля (САК) предназначена для автоматического контроля различных физических величин (параметров), сведения о которых необходимы при управлении объектом. Всякая система состоит из элементов, узлов и устройств, оределенную функцию; следовательно, систему автоматического контроля можно представить схематически ( Рисунок 10)
 Датчик (Д) измеряет значение контролируемого параметра объекта (О) и преобразует его в сигнал, удобный для усиления или передачи. Наибольшее применение находят датчики, преобразующие неэлектрическую величину в электрическую.
Датчик (Д) измеряет значение контролируемого параметра объекта (О) и преобразует его в сигнал, удобный для усиления или передачи. Наибольшее применение находят датчики, преобразующие неэлектрическую величину в электрическую.
 Усилитель (У) - устройство, усиливающее слабый сигнал, поступающий от датчика, так, что он становится достаточным для воздействия на исполнительный элемент.
Усилитель (У) - устройство, усиливающее слабый сигнал, поступающий от датчика, так, что он становится достаточным для воздействия на исполнительный элемент.
 Исполнительный элемент (ИЭ) - устройство, посредством которого выполняются заключительные операции.
Исполнительный элемент (ИЭ) - устройство, посредством которого выполняются заключительные операции.
Элементы передачи и связи - устройства, обеспечивающие передачу сигналов от датчика до исполнительного элемента.
В состав систем автоматизации производственных процессов входят дополнительные элементы, не участвующие в преобразовании информации, а обеспечивающие данное преобразование. К ним относятся источники энергии, стабилизаторы, переключатели и др.
В зависимости от вида исполнительного элемента автоматический контроль разделяют на четыре основные группы:
- автоматическая сигнализация характерных или предельных значений параметров; сигнализирующее устройств (СУ) - это лампочки, звонок, сирена;
- автоматическое указание значений контролируемых параметров; указывающий прибор (ПУ) может быть стрелочным, цифровым;
- автоматическая регистрация значений контролируемого параметра; регистрирующее устройство (РУ) - это самописец;
- автоматическая сортировка различных изделий в зависимости от заданных значений контролируемых параметров (ПС – прибор сортирующий).
Система автоматического контроля не вмешивается в ход протекания технологического процесса.
2. В зависимости от вида, стоимости и требований, предъявляемых к точности изготовления деталей, контроль может быть полным, когда проверяются все изделия, и выборочным, когда проверяется часть деталей.
По принципу действия различают:
- системы пассивного контроля, представляющие собой системы автоматического контроля (САК), задача которых получить необходимые сведения об управляемом объекте или параметрах технологического процесса (система не изменяет параметров технологического процесса во время обработки, т.е. ведет себя пассивно);
- системы активного контроля, которые представляют собой системы автоматического регулирования (САР), задача их не только измерять необходимые величины, но и поддерживать их заданное значение во время технологического процесса.
В настоящее время системы активного контроля организуют в большинстве случаев по принципу адаптивного управления, т. е. управление технологическим процессом ведут совместно с ЧПУ и САК, задача которой на основании сведений, полученных от автоматических устройств, менять программу управления, тем самым восстанавливая отклонившиеся величины.
По назначению различают следующие системы автоматического контроля: технологических параметров в процессе обработки; параметров готовых изделий (контроль качества продукции); состояния оборудования и систем управления; состояния инструмента, оснастки и т. д.; программного и информационного обеспечения (сбор сведений, обработка сведений, систематизация и т. д.).
3. Системы автоматического пассивного контроля различаются:
- аппаратными средствами и способами организации контроля; разновидностями и способами контактирования с измеряемыми величинами (прямое контактирование, косвенное, контактирование в рабочей позиции, в измеряемой позиции и т. д.);
- видами датчиков, применяемых для измерения величин (индуктивные, пневматические, фотоэлектрические, тензометрические, оптоэлектронные);
- способами организации измерительной системы и средствами обработки полученной информации (измерение, дискретное, измерение методом сравнения с заданным значением, измерение с преобразованием аналогового сигнала в числовой код и т. д.);
- видами индикаторов и средствами отображения информации измерений (стрелочные индикаторы, цифровые, символьные, сегментные отображения информации на ЭЛТ и т. д.);
- способами хранения и регистрации данных (регистрация на бумажных лентах в виде диаграмм, графиков, регистрация посредством печатающих устройств, регистрация с записью в ЗУ).
Системы пассивного автоматического контроля могут иметь также различные способы организации контроля: непосредственно во время технологического процесса (постоянный или поэтапный) и полученных результатов.


 На рисунке 11 показана одна из структурных схем системы пассивного автоматического контроля. Система включает в себя: дифференциальный индуктивный размерный датчик 1; электронный блок (ЭБ), имеющий электронный усилитель и преобразователь; указывающий прибор, выполненный в виде электронного цифрового индикатора (ЭЦИ) и исполнительного реле. Датчик имеет два Ш-образных сердечника (4), закрепленных с помощью плоских пружин на корпусе датчика. На сердечниках расположены две обмотки (W1W3), которые совместно с полуобмотками трансформатора (W2W4,) представляют собой уравновешенный измерительный мост, в диагонали которого подключено питающее напряжение от сети переменного тока (Un). Измерительный шток датчика 2 подвешен посредством плоских пружин 3 к корпусу. На штоке закреплен якорь сердечника 5. Вращением микрометрического винта 8 сердечники перемещаются относительно якоря. Если размеры детали до обработки превышают пределы измерения датчика, то ограничительная гайка 6, установленная на штоке, с помощью угольника 7 отодвигает сердечник от микрометрического винта (зона отсутствия измерений).
На рисунке 11 показана одна из структурных схем системы пассивного автоматического контроля. Система включает в себя: дифференциальный индуктивный размерный датчик 1; электронный блок (ЭБ), имеющий электронный усилитель и преобразователь; указывающий прибор, выполненный в виде электронного цифрового индикатора (ЭЦИ) и исполнительного реле. Датчик имеет два Ш-образных сердечника (4), закрепленных с помощью плоских пружин на корпусе датчика. На сердечниках расположены две обмотки (W1W3), которые совместно с полуобмотками трансформатора (W2W4,) представляют собой уравновешенный измерительный мост, в диагонали которого подключено питающее напряжение от сети переменного тока (Un). Измерительный шток датчика 2 подвешен посредством плоских пружин 3 к корпусу. На штоке закреплен якорь сердечника 5. Вращением микрометрического винта 8 сердечники перемещаются относительно якоря. Если размеры детали до обработки превышают пределы измерения датчика, то ограничительная гайка 6, установленная на штоке, с помощью угольника 7 отодвигает сердечник от микрометрического винта (зона отсутствия измерений).
Принцип действия САК состоит в следующем. При контактировании измерительного штока с измеряемой поверхностью якорь средечника отклоняется от среднего положения, что вызывает дисбаланс моста (сигнал рассогласования) вследствие неравенства зазоров между якорем и сердечником. Напряжение рассогласования моста, усиленное и преобразованное в электронном блоке в цифровой код, индицируется на ЭЦИ в виде значения отклонения размера. При балансе моста электронный блок формирует сигнал на прекращение обработки с помощью исполнительного реле.
19 - Интерфейс ЭВМ с видеотерминалом - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
 В массовых видах производства применяются для контроля изделий или деталей применяют всевозможные пассивные средства контроля, работающие как автоматические сортировщики. Они не только измеряют размер или его отклонения, но и по результатам измерений дают оценку: годная деталь с допустимыми отклонениями; негодная с отклонениями, которые можно
В массовых видах производства применяются для контроля изделий или деталей применяют всевозможные пассивные средства контроля, работающие как автоматические сортировщики. Они не только измеряют размер или его отклонения, но и по результатам измерений дают оценку: годная деталь с допустимыми отклонениями; негодная с отклонениями, которые можно  исправить; бракованная. Такие автоматические сортировщики, кроме измерительной системы, имеют исполнительные механизмы подачи детали на измеряемую позицию, ее фиксацию и механизмы, распределяющие детали по накопителям упомянутых позиций.
исправить; бракованная. Такие автоматические сортировщики, кроме измерительной системы, имеют исполнительные механизмы подачи детали на измеряемую позицию, ее фиксацию и механизмы, распределяющие детали по накопителям упомянутых позиций.
Большинство автоматических сортировщиков имеют следующую функциональную структуру (Рисунок 12); бункер-накопитель (БН1) или магазин-накопитель для хранения контролируемых деталей; механизм подачи, базирования деталей на измеряемой позиции (МПД) систему автоматического контроля (САК) с индикацией и сигнализацией о браке и недопустимых отклонениях (СИУ), распределительное устройство (РУ), которое распределяет детали (Д) по бункерам-накопителям (А - бункер годных деталей, Б бункер для деталей «исправимый брак» В - бункер деталей «брак»).
4. С развитием микропроцессорной и микроэлектронной измерительной техники многие задачи автоматизации контроля в машиностроении решаются на новом техническом уровне с учетом новых достижений в технике.
САК параметров технологического процесса или автоматического контроля качества готовых изделий на базе развития микроэлектронной техники и средств вычислительной техники стали составной частью САУ и встраиваются непосредственно в технологические объекты или технологические комплексы.
Измерительные машины изготовляют в виде промышленных роботов автоматического контроля, которые оснащены измерительными средствами, управляющими программами. САК СЧПУ выполняют как координатно-измерительные машины (КИМ), которые могут быть автономными или могут встраиваться в технологический комплекс.

 На рисунке 13 показана структурная схема координатно-измерительной системы, состоящей из измерительного стола, который свободно перемещается по трем координатам X, Y, Z. На столе с помощью приспособления устанавливается контролируемое изделие. На неподвижной части относительно стола устанавливается измерительное устройство, фиксирующее положение измеряемой поверхности в виде калибра, щупа. Перемещение измерительного стола относительно фиксируемой позиции измеряется размерными датчиками (РД), которые ведут отсчет перемещения посредством оптической измерительной шкалы (ИШ). Сигналы датчика в виде импульсов, число которых пропорционально перемещению, подаются в операционное устройство (ОУ), где преобразуются в сигналы индикации (операционное устройство в своем ЗУ может сравнивать заданное значение с измеренным и вычислять отклонение). Обработанный в операционном устройстве сигнал подается на цифровое индицирующее устройство (ЦИУ), где в цифровом коде индицируется измеряемая величина или ее отклонение.
На рисунке 13 показана структурная схема координатно-измерительной системы, состоящей из измерительного стола, который свободно перемещается по трем координатам X, Y, Z. На столе с помощью приспособления устанавливается контролируемое изделие. На неподвижной части относительно стола устанавливается измерительное устройство, фиксирующее положение измеряемой поверхности в виде калибра, щупа. Перемещение измерительного стола относительно фиксируемой позиции измеряется размерными датчиками (РД), которые ведут отсчет перемещения посредством оптической измерительной шкалы (ИШ). Сигналы датчика в виде импульсов, число которых пропорционально перемещению, подаются в операционное устройство (ОУ), где преобразуются в сигналы индикации (операционное устройство в своем ЗУ может сравнивать заданное значение с измеренным и вычислять отклонение). Обработанный в операционном устройстве сигнал подается на цифровое индицирующее устройство (ЦИУ), где в цифровом коде индицируется измеряемая величина или ее отклонение.



















