
Нечеткий регулятор
Лекция № 11. 4.1.2. Нечеткий регулятор для управление движением подъемного крана
При перемещении грузов с помощью кранов часто возникают колебания, амплитуда которых зависит от веса и формы груза, направления и способа подъема, длины груза и, естественно, развиваемых при этом ускорений.
Применение классических ПИД - регуляторов в данном случае оказывается возможным лишь тогда, когда имеется возможность перестраивать их параметры непрерывно, в реальном времени в процессе функционирования. Однако адаптивные алгоритмы управления также должны долго отлаживаться и являются дорогостоящими.
Применение нечеткого регулирования для этих целей требует лишь использования небольшого количества локальных правил, которые связывают требуемую скорость движения крана, а также угловое отклонение и угловую скорость колебаний груза [16]. При этом затраты на проектирование оказываются существенно меньше по сравнению с традиционными методами адаптивного управления, а точность регулирования сохраняется.
Нечеткий регулятор, разработанный фирмой OMRON - Electronic, в данном случае имеет 3 входные переменные:
 - задающее воздействие (уставка) для скорости движения крана;
- задающее воздействие (уставка) для скорости движения крана;
 - угол отклонения груза;
- угол отклонения груза;
 - угловая скорость колеблющегося груза.
- угловая скорость колеблющегося груза.
Управляющее воздействие на выходе нечеткого регулятора - сигнал скорости  , который должен отрабатываться электроприводом крана.
, который должен отрабатываться электроприводом крана.
Рекомендуемые материалы
Структурная схема нечеткого регулятора принимает вид (рис. 4.3).
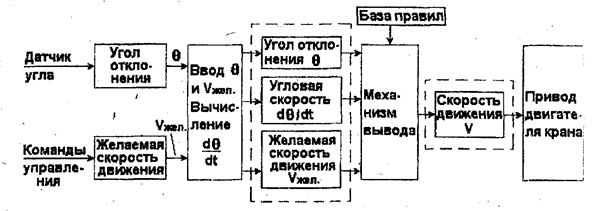
Рис. 4.3. Структурная схема нечеткого регулятора
Как видно из рисунка., нечеткий регулятор реализует следующие функции:
- ввод (с помощью аналого-цифровых преобразователей) значений угла отклонения груза () и команд управления от крановщика на изменение скорости и направления движения крана ( );
);
- фаззификация указанных значений с использованием лингвистических переменных и заданных функций принадлежности;
- получение (вывод) нечеткого множества значений управляющего воздействия ( );
);
- дефаззификация, т.е. получение детерминированного значения , подаваемого в качестве сигнала управления на привод двигателя крана.
Функции принадлежности выбираются следующим образом (рис. 4.4).
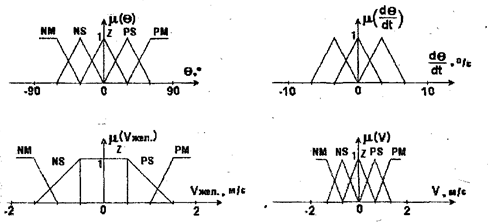
Рис. 4.4. Функции принадлежности лингвистических переменных
Для угла , желаемой скорости движения  и сигнала управления скоростью V задаются по 5 термов (NM, NS, Z, PS, PM); для угловой скорости
и сигнала управления скоростью V задаются по 5 термов (NM, NS, Z, PS, PM); для угловой скорости  - 3 терма (NS, Z, PS). Заметим, что в тех случаях, когда выбранная скорость не лежит в окрестности нуля, значение лингвистической переменной изменяется с целью переключения соответствующих значений управляющего воздействия V. Напротив, если
- 3 терма (NS, Z, PS). Заметим, что в тех случаях, когда выбранная скорость не лежит в окрестности нуля, значение лингвистической переменной изменяется с целью переключения соответствующих значений управляющего воздействия V. Напротив, если  , то регулятор исходит из того, что кран необходимо притормаживать.
, то регулятор исходит из того, что кран необходимо притормаживать.
Правила, используемые при работе нечеткого регулятора;
1°. ЕСЛИ  , ТО
, ТО  ;
;
2°. ЕСЛИ  , ТО
, ТО  ;
;
3° ЕСЛИ  , ТО
, ТО  ;
;
4° ЕСЛИ  , ТО
, ТО  ;
;
5° ЕСЛИ  И
И  , ТО ;
, ТО ;
6° ЕСЛИ  И
И  И , ТО ;
И , ТО ;
7° ЕСЛИ И  И , ТО ;
И , ТО ;
8° ЕСЛИ И  И , ТО
И , ТО  ;
;
9° ЕСЛИ  И
И  И , ТО ;
И , ТО ;
10° ЕСЛИ И  И , ТО ;
И , ТО ;
11° ЕСЛИ  И И , ТО ;
И И , ТО ;
12° ЕСЛИ  И
И  И , ТО ;
И , ТО ;
Ещё посмотрите лекцию "2 Классификация БиД" по этой теме.
13° ЕСЛИ И И , ТО ;
14° ЕСЛИ И И , ТО ;
15° ЕСЛИ  И , ТО .
И , ТО .
По существу, здесь реализуются те же правила действий, которые интуитивно использует опытный крановщик в процессе своей работы.
Например, правило 7° можно выразить следующими словами: "ЕСЛИ груз отклонен в противоположную сторону по отношению к направлению его транспортировки, И угловая скорость колебаний примерно равна нулю, И кран подтормаживается, ТО подвинуть кран немного в направлении, противоположном направлению транспортировки".
Подчеркнем, что преимущества использования нечеткого управления; становятся особенно ощутимыми в случаях большой нагрузки оператора, его психологического и физического утомления, затруднений с точки зрения автоматизации процессов традиционными методами. Именно эти обстоятельства и являются определяющими для рассмотренной задачи управления движением крана.



















