Курсовая работа 4: Проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой вариант А
Описание
Сдан и защищен на отлично
В архиве содержатся все листы в pdf и cdw, маткад с расчетами, РПЗРеферат.
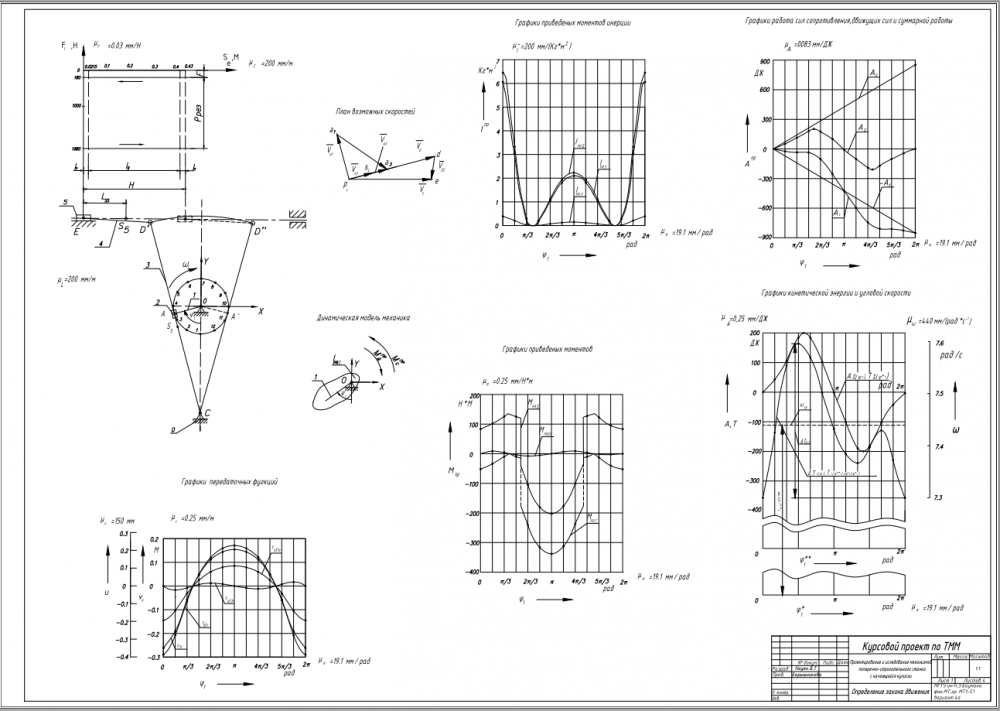
В курсовой работе выполнено проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой. Проведено:
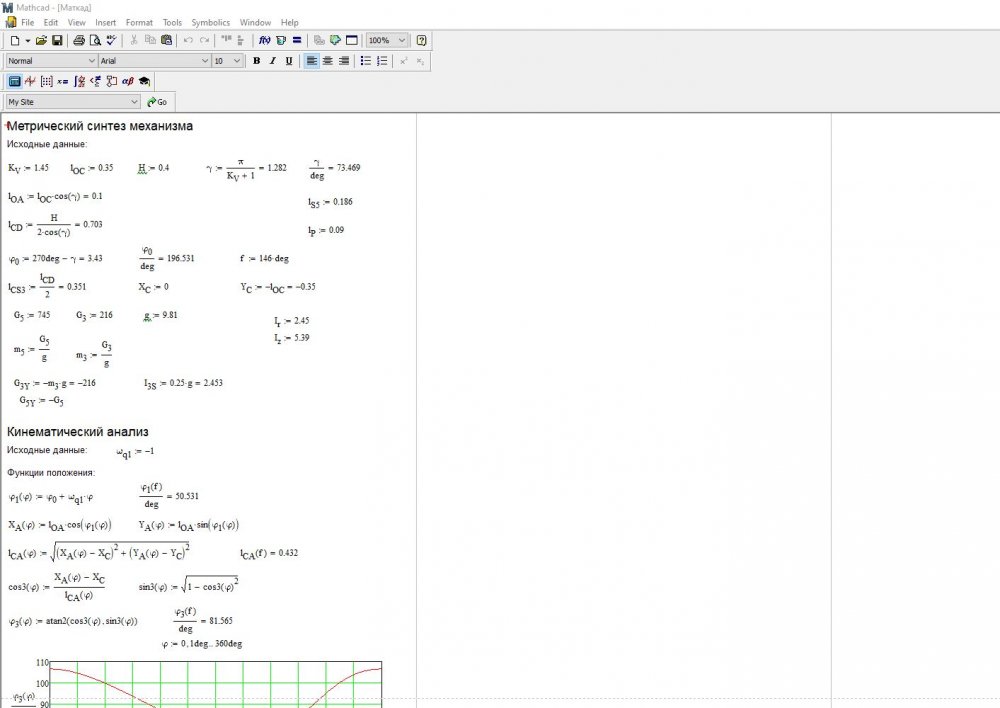
- · проектирование кривошипно-кулисного механизма и определение закона его движения, расчет дополнительной маховой массы;
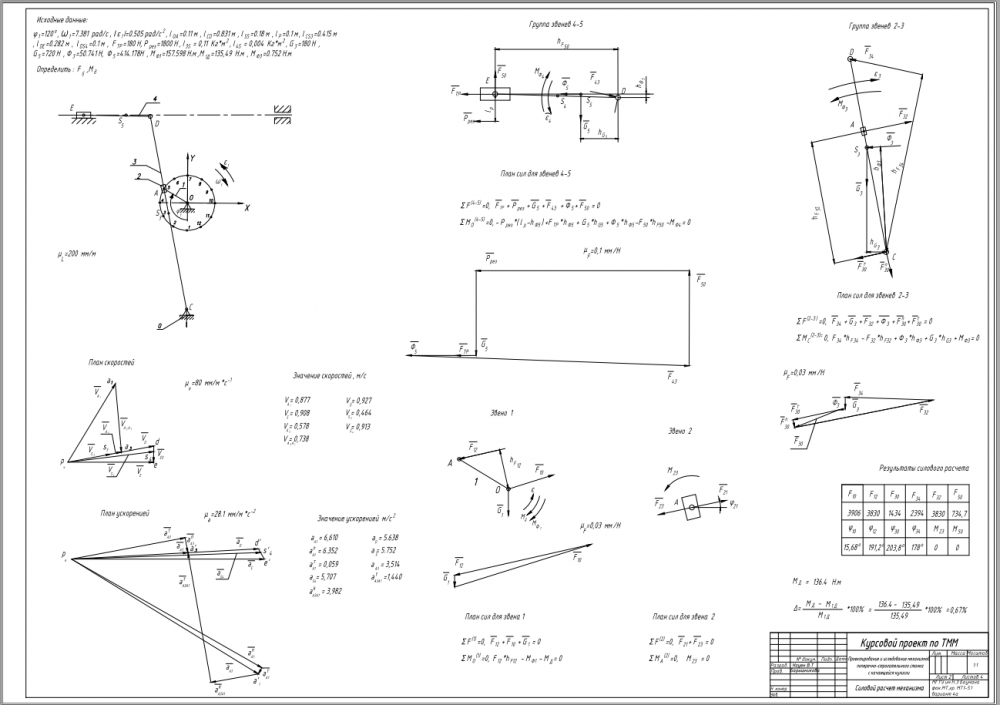
- · силовой расчет кривошипно-кулисного механизма
- · проектирование кулачкового механизма поперечной подачи стола
- · проектирование цилиндрической эвольвентной зубчатой передачи и планетарного редуктора
Пояснительная записка к курсовому проекту " Проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой " содержит 40 страниц машинописного текста, 8 таблиц.
Техническое задание
ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ ПОПЕРЕЧНО-СТРОГАЛЬНОГО СТАНКА
С КАЧАЮЩЕЙСЯ КУЛИСОЙ
Назначение и краткое описание работы механизмов станка
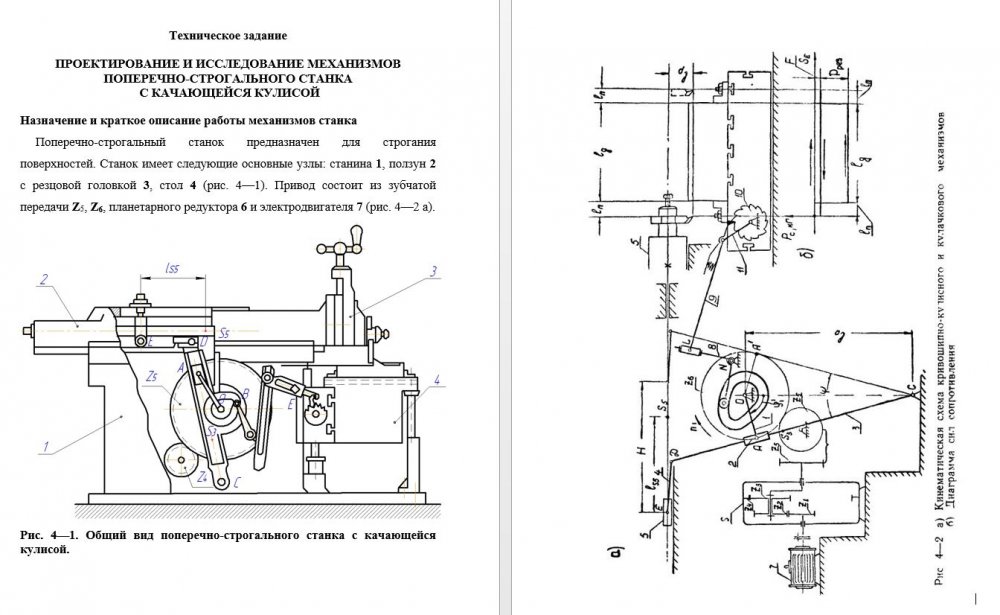
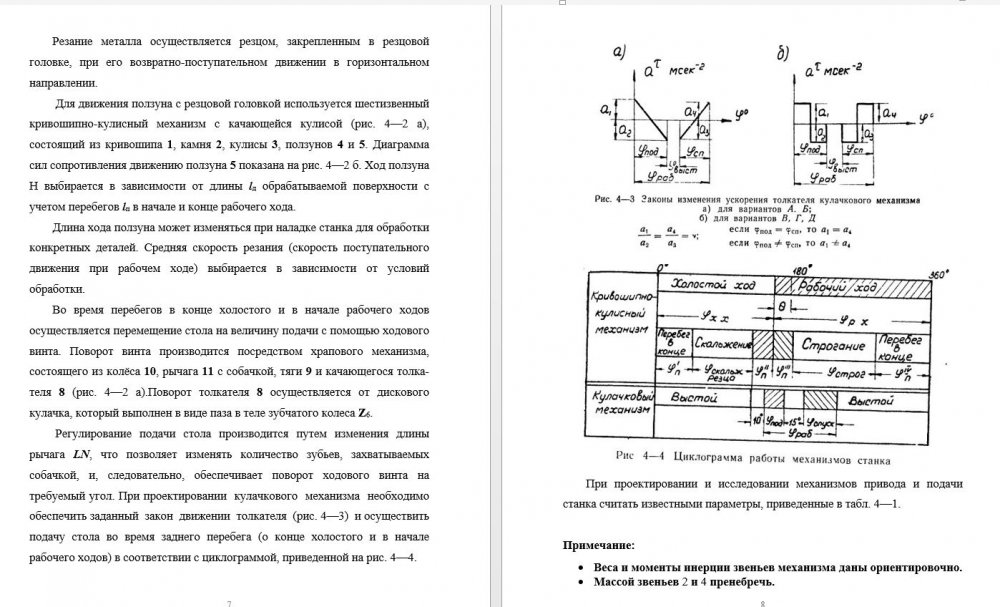
Поперечно-строгальный станок предназначен для строгания поверхностей. Станок имеет следующие основные узлы: станина 1, ползун 2 с резцовой головкой 3, стол 4 (рис. 4—1). Привод состоит из зубчатой передачи Z5, Z6, планетарного редуктора 6 и электродвигателя 7 (рис. 4—2 а).
Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движении в горизонтальном направлении.
Для движения ползуна с резцовой головкой используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой (рис. 4—2 а), состоящий из кривошипа 1, камня 2, кулисы 3, ползунов 4 и 5. Диаграмма сил сопротивления движению ползуна 5 показана на рис. 4—2 б. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в начале и конце рабочего хода.
Длина хода ползуна может изменяться при наладке станка для обработки конкретных деталей. Средняя скорость резания (скорость поступательного движения при рабочем ходе) выбирается в зависимости от условий обработки.
Во время перебегов в конце холостого и в начале рабочего ходов осуществляется перемещение стола на величину подачи с помощью ходового винта. Поворот винта производится посредством храпового механизма, состоящего из колёса 10, рычага 11 с собачкой, тяги 9 и качающегося толкателя 8 (рис. 4—2 а).Поворот толкателя 8 осуществляется от дискового кулачка, который выполнен в виде паза в теле зубчатого колеса Z6.
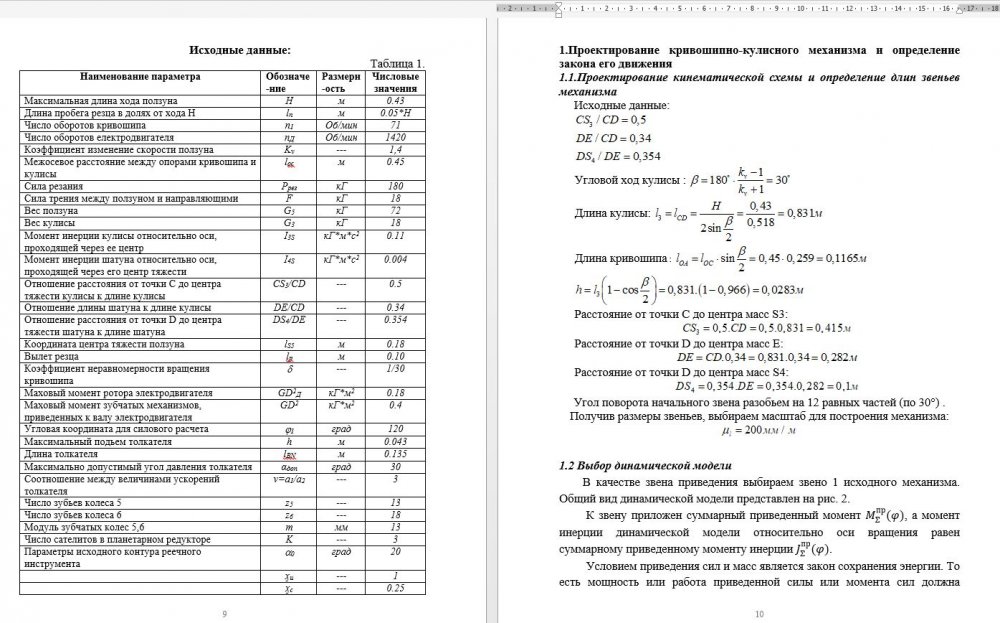
Регулирование подачи стола производится путем изменения длины рычага LN, что позволяет изменять количество зубьев, захватываемых собачкой, и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектировании кулачкового механизма необходимо обеспечить заданный закон движении толкателя (рис. 4—3) и осуществить подачу стола во время заднего перебега (о конце холостого и в начале рабочего ходов) в соответствии с циклограммой, приведенной на рис. 4—4.
Исходные данные:
Наименование параметра | Обозначение | Размерность | Числовые значения |
Максимальная длина хода ползуна | H | м | 0.43 |
Длина пробега резца в долях от хода Н | ln | м | 0.05*H |
Число оборотов кривошипа | n1 | Об/мин | 71 |
Число оборотов електродвигателя | nД | Об/мин | 1420 |
Коэффициент изменение скорости ползуна | Kv | --- | 1,4 |
Межосевое расстояние между опорами кривошипа и кулисы | loc | м | 0.45 |
Сила резания | Pрез | кГ | 180 |
Сила трения между ползуном и направляющими | F | кГ | 18 |
Вес ползуна | G5 | кГ | 72 |
Вес кулисы | G3 | кГ | 18 |
Момент инерции кулисы относительно оси, проходящей через ее центр | I3S | кГ*м*с2 | 0.11 |
Момент инерции шатуна относительно оси, проходящей через его центр тяжести | I4S | кГ*м*с2 | 0.004 |
Отношение расстояния от точки С до центра тяжести кулисы к длине кулисы | CS3/CD | --- | 0.5 |
Отношение длины шатуна к длине кулисы | DE/CD | --- | 0.34 |
Отношение расстояния от точки D до центра тяжести шатуна к длине шатуна | DS4/DE | --- | 0.354 |
Координата центра тяжести ползуна | lS5 | м | 0.18 |
Вылет резца | lp | м | 0.10 |
Коэффициент неравномерности вращения кривошипа | d | --- | 1/30 |
Маховый момент ротора электродвигателя | GD2Д | кГ*м2 | 0.18 |
Маховый момент зубчатых механизмов, приведенных к валу электродвигателя | GD2 | кГ*м2 | 0.4 |
Угловая координата для силового расчета | j1 | град | 120 |
Максимальный подьем толкателя | h | м | 0.043 |
Длина толкателя | lBN | м | 0.135 |
Максимально допустимый угол давления толкателя | αдоп | град | 30 |
Соотношение между величинами ускорений толкателя | v=a1/a2 | --- | 3 |
Число зубьев колеса 5 | z5 | --- | 13 |
Число зубьев колеса 6 | z6 | --- | 18 |
Модуль зубчатых колес 5,6 | m | мм | 13 |
Число сателитов в планетарном редукторе | K | --- | 3 |
Параметры исходного контура реечного инструмента | a0 | град | 20 |
| ӽи | --- | 1 |
| ӽс | --- | 0.25 |


Файлы условия, демо
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Отзывы и вопросы




















