Курсовая работа: Юстировочная система на основе магнитореологического привода для адаптивного телескопа АСТ-25
Описание
Содержание
| Реферат…………………………………………………………… | 3 |
| Введение…………………………………………………………. | 4 |
| 1. Описание процессной модели……………………………….. | 8 |
| 1.1. Функции системы…………………………………………………….. | 8 |
| 1.2. Целевые процессы……………………………………………………. | 8 |
| 1.3. Техническое задание на управляющую программу………………… | 11 |
| 2. Комплексная принципиальная схема………………………... | 13 |
| 2.1. Механический интерфейс МР-привода……………………………… | 13 |
| 2.2. Энергетический интерфейс МР-привода……………………………. | 13 |
| 2.3. Информационный интерфейс МР-привода………………………….. | 14 |
| 3. Техническое задание на элементы и узлы САУ……………. | 15 |
| 3.1. Механическая часть САУ…………………………………………….. | 15 |
| 3.2. Энергетическая часть САУ…………………………………………… | 18 |
| 3.3. Информационная часть САУ…………………………………………. | 20 |
| 4. Расчет проектируемых компонентов САУ………………….. | 33 |
| Заключение………………………………………………………. | 40 |
| Список литературы………………………………………………. | 41 |
| Приложения………………………………………………………. | 42 |
Реферат
к курсовому проекту
Юстировочная система на основе магнитореологического привода для адаптивного телескопа АСТ-25
Записка содержит 78 стр., 29 рис., 6 табл.
Графические работы выполнены на ПК с помощью программ: КОМПАС-3D V8, Sprint-Layout 5, записка выполнена в Microsoft Word 2003.
Целью данного курсового проекта является овладение навыками, методами и средствами комплексных разработок механических и электронных компонентов оборудования САУ.
Задачи проекта:
-распределить функции машины между различными компонентами и обосновании этих функций;
-постановить четкое техническое задание перед разработчиками отдельных компонентов;
-выполнить техническую документацию на электронные компоненты.
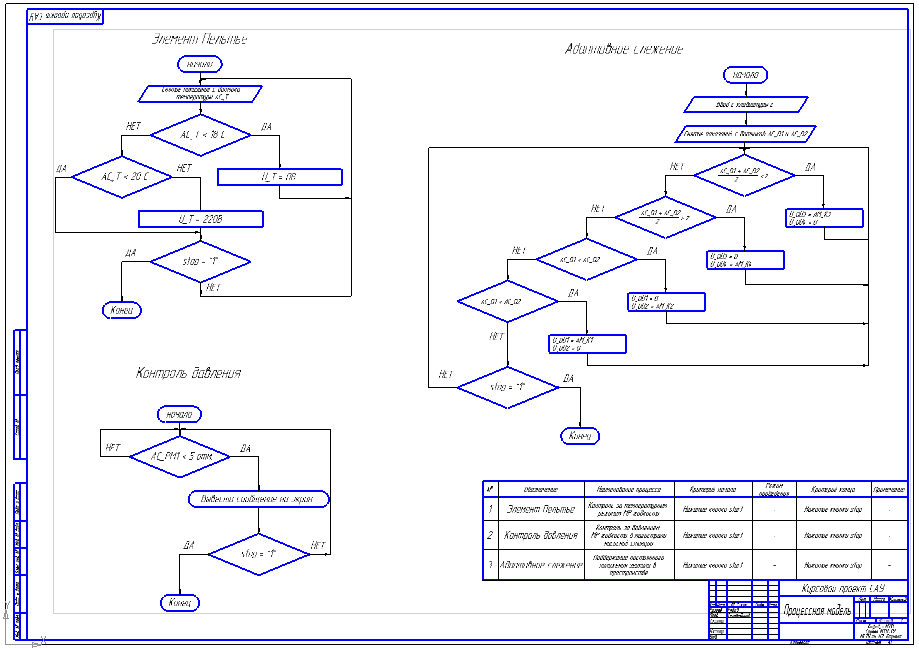
Курсовой проект выполнен в объеме 4 листов формата А1 и расчетно-пояснительной записки. На первом листе приведены алгоритм работы, таблица процессов, экран монитора. На втором и третьем листах - комплексная принципиальная схема юстировочной системы МР-привода: механика, энергообеспечение, системы автоматического и ручного управления. На четвертом листе - принципиальная электрическая схема блока усилителей токовых сигналов и топология электрической платы. В приложении приведена документация на все элементы платы блока усилителей. В расчетно-пояснительной записке приведены необходимые пояснения и расчеты, отражены принципы построения САУ магнитореологическим приводом (МР-приводом), даны описания листов проекта. В приложении приведены описания всех элементов, используемых в САУ.
Введение
Описание юстировочной системы
Схема экспериментального стенда МР-модуля для АСТ-25 представлена на рисунке 1.1. Общий вид стенда и насосной станции представлены на рис. 1.2 и рис. 1.3.
| |
Рис. 1.1. Схема МР-привода |
Стенд состоит из неподвижной опоры, установленной на фундаменте; подвижной опоры, вращающейся в подшипниках, расположенных в неподвижной опоре. На подвижной опоре расположен МР-привод. Фотография МР-привода представлена на рис. 1.6. В верхней части стенда на поворотной опоре закреплён узел упругой подвески в сборе (2). Макет элементарного сегмента зеркала (7) закреплён на упругой подвеске, его фотография представлена на рисунке 1.4. Узел упругой подвески допускает перемещение макета элементарного сегмента зеркала вдоль вертикальной оси и поворот вокруг двух взаимно перпендикулярных осей в горизонтальной плоскости. Фотография узла подвески показана на рис. 1.5. Насосная станция осуществляет подачу магнитореологической суспензии в МР-привод. Под действием управляющих сигналов, подаваемых системой управления на МР-привод происходит перемещение центрального штока. В свою очередь, шток воздействует на тяги (8), закреплённые одним концом к штоку, а другим к макету элементарного сегмента зеркала (7), тем самым осуществляется перемещение макета. Перемещение макета регистрируется специальными датчиками перемещения D1 и D2 (10). Система термостатирования (4) служит для поддержания температуры МРС суспензии в требуемом диапазоне. Система термостатирования состоит из термодатчика (1), элемента Пельтье и резервуара. Давление МРС суспензии в магистрали контролируется деформационными манометрами РМ1 и РМ2 (9).
Данный стенд выполнен таким образом, чтобы сымитировать сегменты зеркала, расположенные под различными углами к горизонту. Как видно из схемы, поворотная опора совместно с приводом, узлом подвески и макетом зеркала имеет возможность поворачиваться вокруг горизонтальной оси и фиксироваться в нужном положении за счет гайки.
| |
Рис. 1.2. Общий вид стенда | Рис. 1.3. Общий вид насосной станции |
| |
Рис. 1.4. Макет зеркала | Рис. 1.5. Узел подвески |
| |
Рис. 1.6. Фотография МР-привода | Рис. 1.7. Модель МР-привода |
Ход горизонтальный (по Х,У) – 10 мм
Ход вертикальный (по Z) – 10 мм
Погрешность позиционирования – 50 нм
Постоянная времени – 200 мс
Нагрузочная способность – 1000 Н
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel