Курсовая работа: Система автоматического управления 3-координатного МР-привода тунельного сканируещего микроскопа
Описание
Содержание.
Описание работы МР-привода применяемого в установке. 6
3. Процессная модель работы МР-привода. 7
3.1.1 Основные целевые функции. 7
3.1.3 Функции коррекции цели. 7
3.3 Процессы реализуемые в системе. 8
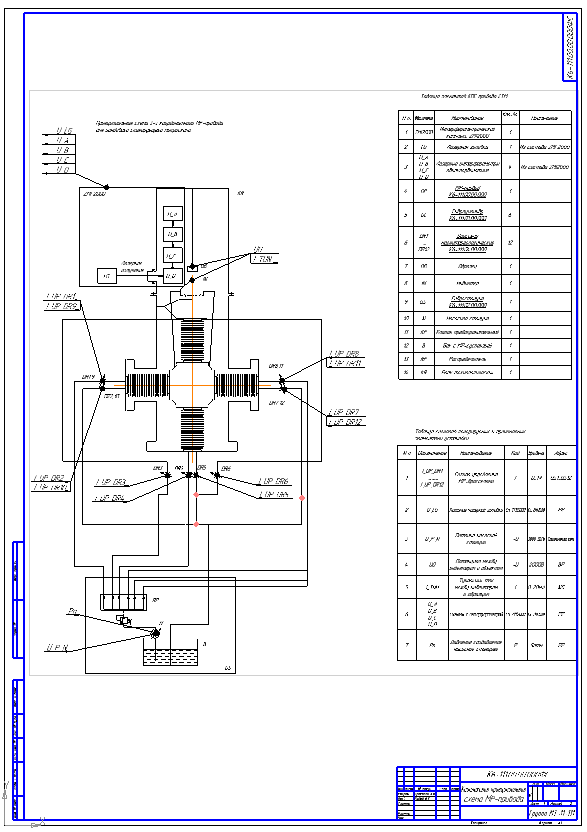
4. Комплексная принципиальная схема установки. 17
4.2 КПС САУ и энергообеспечения МР-привода. 18
5. Техническое задание на элементы и узлы машины. 20
5.1 Управляющий компьютер IBM PC AT совместимый. 20
5.3 Комплекс интерферометрический. 29
5.4 Блок питания усилителей. 30
6. Схема принципиальная электрическая блока усилителей тока. 31
1. Аннотация.
Привод туннельного сканирующего микроскопа является приводом, работающим по трём осям (осям X, Y, Z). Работа привода основана на изменение свойств магнитореологической суспензии и осуществляется в установках сверхвысокого вакуума для промежуточного контроля образцов (определения геометрии поверхности образцов, а также позволяет определять на кремниевых пластинах наличие частиц пыли).
Целью проекта является разработка системы автоматического управления для измерения величин перемещений привода при сканировании образцов, а также для задания траекторий перемещений привода и корректировки величины перемещения привода вдоль оси Z.
Для упрощения работы оператора и повышения производительности предложен вариант автоматизированной работы привода.
В современной науке сформировалась новая область - нанотехнология, представляющая собой междисциплинарное направление, простирающееся от молекулярной биологии и генной инженерии до физики поверхности твердого тела, электрохимии и микроэлектроники. Получены уникальные результаты по изучению структуры поверхностей, строения кластеров, природы каталитических центров, строения вирусов, полимеров, отдельных молекул.
Нанотехнология открывает качественно новый уровень изучения различных свойств поверхности материалов. Существует возможность не только исследовать поверхность, но и производить прецизионное воздействие: перемещать слабо связанные с поверхностью наноструктуры (), производить нанолитографию (), кроме того, возможно и физическое воздействие на поверхность.
Возникновение и развитие нанотехнологий связано с открытием физиками из швейцарского отделения компании IBM сканирующих туннельных и атомно-силовых микроскопов (1981-1986 гг.).
К настоящему времени сменилось уже два поколения сканирующих зондовых микроскопов.
К первому поколению относятся сканирующие туннельные микроскопы (СТМ). Они были изобретены в 1981 году как сверхвысоковакуумные приборы, на которых впервые было получено атомарное разрешение при исследовании поверхности кристаллических образцов. Также были созданы и получили распространение жидкостные, воздушные, вакуумные и сверхвысоковакуумные варианты приборов.
Принцип работы СТМ - это регистрация туннельного тока между проводящим образцом и микроиглой. Микроигла формирует туннельный ток, локализованный на малой площади. Например, если микрозонд удален на фиксированное расстояние от поверхности, то высота физического рельефа в исследуемой точке определит величину туннельного тока. Контролируя при сканировании фиксированную величину туннельного тока за счет вертикального перемещения микрозонда, определяют микрорельеф поверхности. Применение СТМ ограничивается проводящими поверхностями, и исследования, в основном, имеют чисто научное значение. Кроме того, интерпретация СТМ-данных не однозначна - ток зависит не только от расстояния, но и плотности электронных состояний, энергии связи электронов, присутствия адсорбционных слоев.
С 1993 года стало развиваться новое поколение приборов, использующее в своей работе так называемый многомодовый режим. Суть этого режима заключается в том, что он позволяет как бы "сделать видимым" не только микрорельеф поверхности, но и другие ее характеристики, например, магнитные или электрохимические свойства, вязкость, осуществить регистрацию фото-, электро-, химо-люминесценции, в том числе низкотемпературной, регистрации поверхностных плазмонов и т. д.
На рисунке 2.1 показана структурная схема работы сканирующего туннельного микроскопа.
Рис. 2.1 Структурная схема CNV
Принцип работы СТМ основан на использовании туннельного эффекта. Электронные облака, связанные с поверхностными атомами металла, расположены на очень маленьком расстоянии над поверхностью. Когда острая игла (индентер), обработанная таким образом, что ее конец представляет из себя один атом, точно подводится к такой поверхности, возникает сильное взаимодействие между электронными облаками на поверхности и на атоме – острие иглы, и, если приложить небольшое напряжение, начнет течь туннельный ток. При уменьшении расстояния между острием иглы и поверхностными атомами увеличивается значение туннельного тока. Значение туннельного тока сильно зависит от величины этого зазора, поэтому коррекция высоты иглы, осуществляемая с помощью цепи обратной связи, при поддержании значения туннельного тока постоянным, будет отражать рельеф поверхности образца.
Весь процесс сканирования контролируется персональным компьютером .Результат сканирования - изображение, формируется в виде трехмерного массива высот в каждой точке сканирования, что позволяет в дальнейшем обрабатывать полученное изображение, а также представлять в удобном для анализа виде - двумерном и трехмерном видах, в различных палитрах.
STM Спектроскопия (методы модуляции):
STM Топография (I=cost)
Наиболее обычный способ для отображения STM. Топография использующие поток туннелирования, который зависит от растояния между индентером и поверхностью. Принципиальную схему смотри Лист 1 «Процессная модель работы МР-приводаХарактеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel


















