ДЗ 2: Кинематика плоского движения твердого тела вариант 5
Описание
Показать/скрыть дополнительное описание
Каждый вариант курсового задания содержит одну задачу. Рассматриваемая в задании механическая система имеет две степени свободы. Для каждого варианта заданы законы движения двух звеньев или одного звена и точки другого звена или нити. На схемах механизмов указаны начала и положительные направления отсчета величин, определяющих законы движения. Законы движения справедливы в пределах отрезка времени 1 0 t t , который содержит и расчетный момент времени 1 t (0 t t , 0 t , 1 или 2 с). Схемы механических систем изображены на рисунках для расчетного момента времени t . Для момента времени t требуется: 1) определить скорости и ускорения точек A,B,C, угловые скорости и ускорения всех звеньев механизмов; по векторным формулам построить многоугольники скоростей и ускорений точек; 2) найти положение мгновенного центра скоростей (МЦС) звеньев механизма и мгновенного центра ускорений (МЦУ) звена 2, с их помощью проверить правильность нахождения скорости и ускорения точки B ; 3) нанести на рисунок механизма векторы скоростей и ускорений точек A,B,C, обозначить круговыми стрелками направления угловых скоростей и ускорений звеньев; 4) составить кинематические уравнения для расчета скорости и ускорения точки B , угловых скоростей и ускорений звеньев в зависимости от времени с помощью ЭВМ.
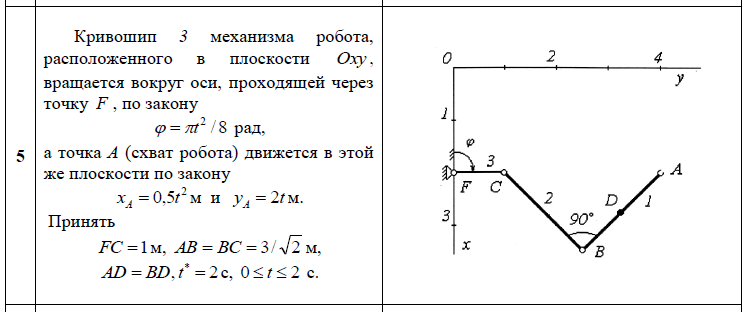
Расчеты провести для 1 0 t t с помощью формул для плоского движения твердого тела, построить графические зависимости рассчитанных величин от времени, изобразить несколько положений механизма при движении, сопоставить расчеты,выполненные вручную, с расчетами на ЭВМ для ряда моментов времени В задачах нити нерастяжимы и не скользят по телам. В ряде задач указано, что тело вращается вокруг оси O(z) . Это значит, что тело вращается вокруг оси, перпендикулярной плоскости рисунка и проходящей через точку O; Использование ЭВМ при расчетах должно согласоваться с преподавателем. При защите курсового задания преподаватель рекомендует студенту определить скорость и ускорение какой-либо точки звена механизма, например точки D. Кривошип 3 механизма робота, расположенного в плоскости Oxy , вращается вокруг оси, проходящей через точку F , по закону /8 2 t рад, а точка А (схват робота) движется в этой же плоскости по закону 2 x 0,5t A м и y t A 2 м.
Принять FC 1м, AB BC 3/ 2 м, , 2 AD BD t с, 0 t 2 с..
Характеристики домашнего задания
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

 stud-msc.help
stud-msc.help