Курсовая работа 8: Проектирование и исследование механизмов одноударного холодновысадочного автомата с цельной матрицей вариант Д
-50%
Описание
Проектирование и исследование механизмов одноударного холодновысадочного автомата с цельной матрицей
Реферат
Курсовой проект содержит 4 листа формата А1 и расчетно-пояснительную записку.Расчетно-пояснительная записка содержит динамический расчет механизма холодновысадочного автомата. Расчет включает синтез основного механизма, определение
его закона движения, силовой расчет основного механизма, расчет и исследование зубчатой передачи и планетарного механизма, расчет кулачкового механизма.
Расчетно-пояснительная записка состоит из 27-ти страниц, 9-ти рисунков, 7-ми таблиц и 2-х приложений.
Содержание
- 1 техническое задание……………………………………………….………......5
- 1.1 Назначение и принцип работы............................................................................... 5
- 1.2 Исходные данные..................................................................................................... 6
- 2 Определение закона движения......................................................................8
- 2.1 Определение размеров механизма.......................................................................... 8
- 2.2 Определение передаточных функций................................................................... 9
- 2.3 Приведение сил и масс............................................................................................. 9
- 2.3.1 Определение приведённого момента сил и суммарной работы................ 10
- 2.3.2 Определение приведённого момента инерции............................................... 11
- 2.4 Определение массы маховика.............................................................................. 13
- 2.5 Определение угловой скорости начального звена и начальной кинетической энергии....... 13
- 2.6 Выбор электродвигателя...................................................................................... 13
- 2.6.1 Определение времени цикла.......................................................................... 13
- 2.6.2 Уточнение частоты вращения двигателя.................................................... 13
- 2.6.3 Средняя работа и мощность за цикл............................................................. 13
- 2.6.4 Учёт потерь на трение....................................................................................... 13
- 3 Силовой расчёт механизма........................................................................... 15
- 3.1 Определение угловых ускорений и ускорений центров масс звеньев механизма......... 15
- 3.2 Определение сил и моментов, действующих на звенья механизма............ 16
- 3.3 Определение реакций в кинематических парах механизма.......................... 16
- 4 Проектирование зубчатой передачи и планетарного механизма............... 18
- 4.1 Выбор коэффициента смещения.......................................................................... 18
- 4.2 Построение профиля зуба, изготовляемого реечным инструментом....... 19
- 4.3 Построение проектируемой зубчатой передачи............................................. 200
- 4.4 Проектирование планетарного зубчатого механизма с цилиндрическими колёсами....... 20
- 4.4.1 Определение передаточного отношения планетарного однорядного редуктора.......... 21
- 4.4.2 Подбор чисел зубьев.......................................................................................... 21
- 4.4.3 Проверка условия соседства.......................................................................... 21
- 4.4.4 Проверка условия сборки................................................................................. 21
- 4.4.5 Предварительное определение межосевого расстояния......................... 22
- 4.4.6 Определение модуля зубчатых колёс редуктора........................................ 22
- 5 Проектирование кулачкового механизма........................................ 23
- 5.1 Построение кинематических диаграмм и расчет масштабов...................... 23
- 5.2 Получение начального радиуса кулачка.......................................................... 23
- 5.3 Профилирование кулачка...................................................................................... 24
- 6 Заключение............................................................................................................... 25
- 7 Список литературы............................................................................................. 25
- 8 Приложение 1
- 9 Приложение 2
Техническое задание
1.1 Назначение и принцип работы
Холодновысадочные автоматы предназначаются для высадки из прутка заклепок, болтов, шурупов и других подобных изделий. На одноударных автоматах возможна высадка только тех изделий, у которых длина высаживаемой части составляет не более 2,5 диаметров прутка.Движение всех механизмов осуществляется от вала 1(рис. 8—1), приводимого во вращение электродвигателем 1 посредством планетарного редуктора 8 и зубчатой передачи 4. Желобчатые ролики 5 механизма подачи материала приводятся во вращение от эксцентрика 6. Прерывистое одностороннее вращение роликов осуществляется посредством храповика 7. Высадочный ползун 3 получает возвратно-поступательное движение от кривошипного вала 1 через шатун 2. Ножевой шток 9 получает движение от ползуна 10, имеющего кулачный паз, в который входит ролик II. Привод ползуна 10 осуществляется от кривошипного вала через регулируемый эксцентрик 12. Кулачковый механизм 17 служит приводом механизма выталкивателя 18.
Процесс высадки изделия: пруток подается прерывисто-вращающимися желобчатыми роликами через отверстие отрезной матрицы 13 до упора (на схеме не показан). При движении ножа вперед от прутка заготовка отрезается и, поддерживаемая специальным крючком, переносится на линию высадки. При движении пуансона 14 к матрице 15 заготовка 20 вталкивается в отверстие матрицы до упора. При дальнейшем движении пуансона происходит высадка головки изделия. При отходе пунсона назад изделие выталкивается стержнем 16 из матрицы.
Кинематический и рабочий цикл механизма высадки совершается в течение одного оборота вала кривошипа.
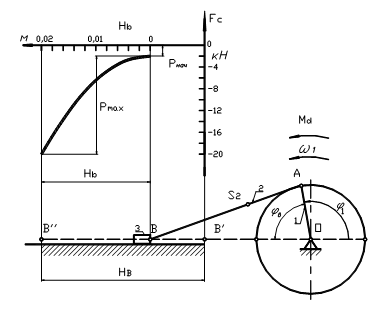 Рисунок 0.1‑2 График изменения силы сопротивления
Рисунок 0.1‑2 График изменения силы сопротивления Функциональная схема автомата показана на рис. 1.1-2.
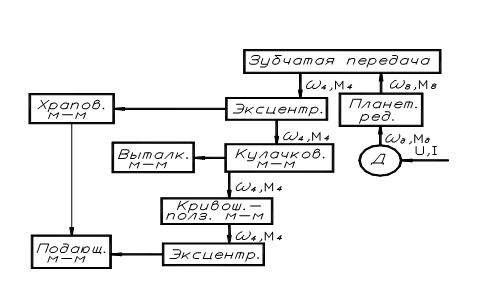 Рисунок 0.1‑3 Функциональная схема
Рисунок 0.1‑3 Функциональная схема1.2 Исходные данные
Таблица 1.1 – 1. Исходные данные.| Наименование параметра | Обозначение | Величина в МКГСС* | Размер-ность в МКГСС* | Вели-чина в СИ | Размер-ность в СИ |
| 1. Число оборотов электродвигателя | nном | 1350 | об/мин | 22,5 | 1/c |
| 2. Число двойных ходов высадочного ползуна | Kx | 220 | 220 | ||
| 3. Ход ползуна при высадке | Нb | 0,038 | м | 0,038 | м |
| 4. Угол поворота кривошипа за время высадки | jb | 90 | град | 90 | град |
| 5. Максимальное усилие высадки | Рмах | 4500 | кГ | 45000 | Н |
| 6. Начальное усилие высадки | Рнач | 0,1 Рмах | кГ | 1 Рмах | Н |
| 7. Отношение длины шатуна к длине кривошипа | lAB/lOA | 3,5 | 3,5 | ||
| 8. Отношение расстояния от точки В до центра тяжести шатуна к длине шатуна | lAS2/lAB | 0,33 | 0,33 | ||
| 9. Координата центра тяжести ползуна | lBS3 | 0,011 | м | 0,011 | М |
| 10. Вес ползуна | G3 | 8,0 | кГ | 80 | Н |
| 11. Вес шатуна | G2 | 3,0 | кГ | 30 | Н |
| 12. Момент инерции шатуна относительно оси, проходящей через его центр тяжести | I2S | 0.0007 | кГмсек2 | 0,007 | кгм2 |
| 13.Коэффициент неравномерности вращения кривошипа | d | 1/15 | 1/15 | ||
| 14. Маховой момент ротора электродвигателя | GD2д (Jд) | 0,48 | кГм 2 | 0.12 | кгм2 |
| 15. Маховой момент планетарного редуктора и колеса 4, приведенный к валу кривошипа | GD2 (J) | 8 | кГм 2 | 2 | кгм2 |
| 16. Угловая координата кривошипа для силового расчета | j1 | 175 | град | 175 | град |
| 17. Ход толкателя кулачкового механизма выталкивателя | h | 0,015 | м | 0,015 | град |
| 18. Максимально допустимый угол давления в кулачковом механизме | aдоп | 30 | град | 30 | град |
| 19. Соотношения между ускорениями толкателя | ν=а4/а1 | 2,0 | 2,0 | ||
| 20. Угол рабочего профиля кулачка dраб=jраб=jвыт+jвыст+jотх | jвыт jвыст jотх | 100 5 70 | град град град | 100 5 70 | град град град |
| 21. Числа зубьев колес | z4 z5 | 14 21 | 14 21 | ||
| 22. Модуль зубьев колес Z4 , Z5 | m | 6 | мм | 6 | мм |
| 23. Число сателлитов в редукторе | К | 3 | 3 | ||
| 24. Параметры исходного реечного инструмента | a0 χи χс | 20 1 0,25 | град | 20 1 0,25 | град |
Чертежи
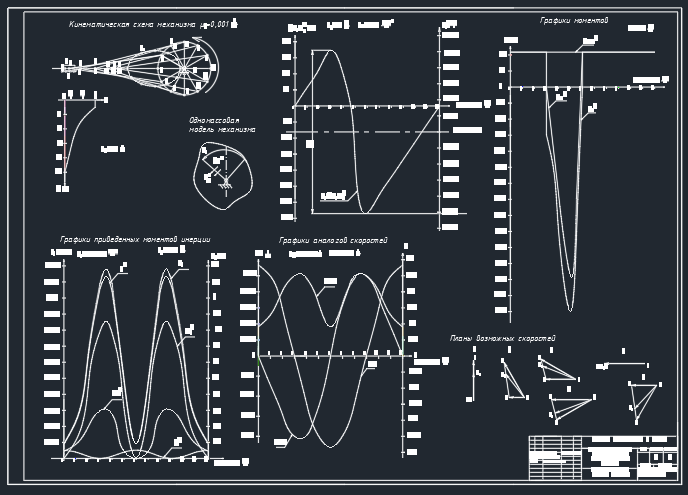
Лист 1 - Определение закона движения ![]()
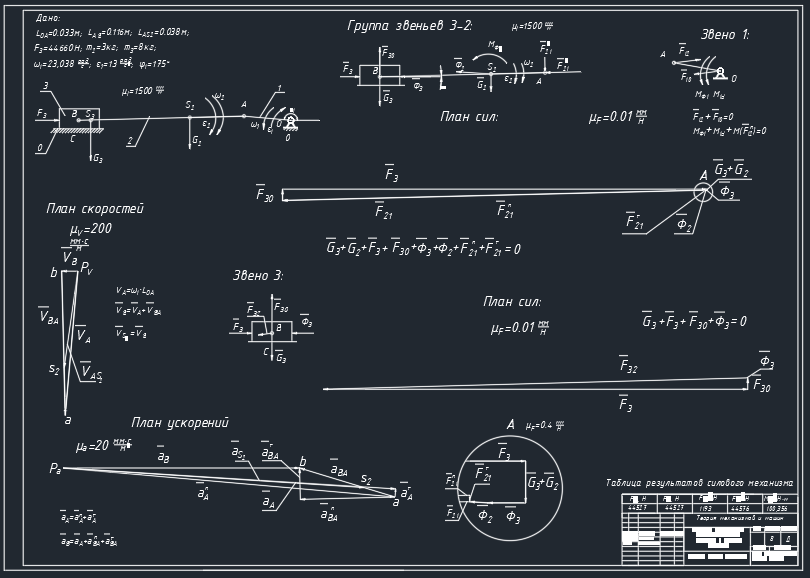
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
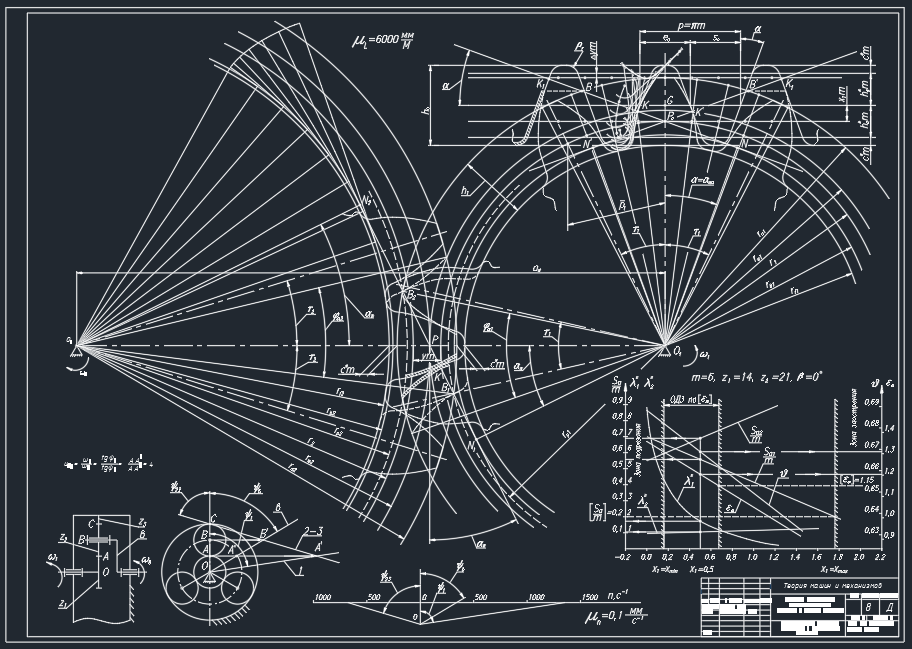
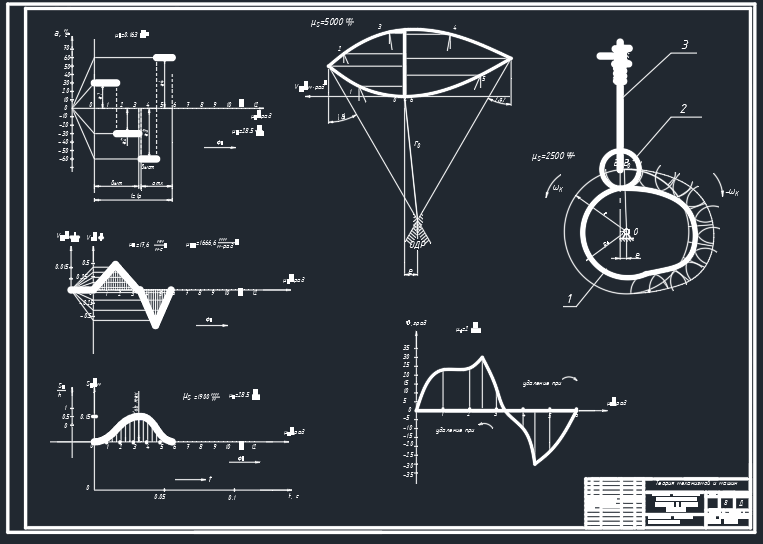
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
1218
Качество
Идеальное компьютерное
Размер
2,63 Mb
Список файлов
РПЗ.doc
Маткад - Лист 1.xmcd
Расчеты - Лист 2.docx
Расчет зубчатой передачи - Лист 3.doc
Расчет планетарного редуктора - Лист 3.doc
Лист 1.dwg
Лист 2.dwg
Лист 3.dwg
Лист 4.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
21 августа 2013 в 19:40
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!


















