ДЗ 2: Кратные интегралы, Ряды, Теория функций комплексного переменного вариант 1
Описание
 Показать/скрыть дополнительное описание
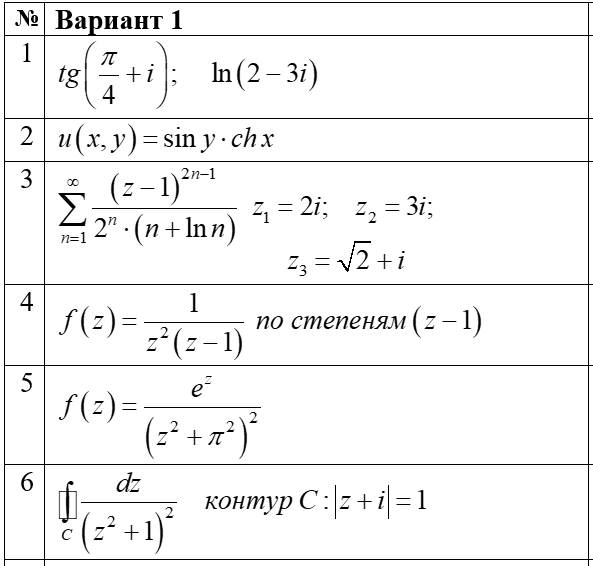
Показать/скрыть дополнительное описаниеЗадача 1. Вычислить указанные значения функций. Задача 2. Установить, может ли данная функция служить вещественной или мнимой частью некоторой аналитической функции и, если может, восстановить эту аналитическую функцию. Убедиться в том, что найденная функция аналитична и удовлетворяет заданному условию. Ниже через u(x,y) обозначается вещественная часть искомой аналитической функции, а через v(x,y) - мнимая часть. Задача 3. Определить круг сходимости заданного степенного ряда. Выяснить сходится ли ряд в заданной точке z1, z2, z3 (если сходится, то как - абсолютно или условно) Сделать рисунок. Задача 4. Найти все разложения заданной функции f(z) по степеням z-a и указать области этих разложений Задача 5.
Найти все особые точки заданной функции f(z), определить их характер и найти вычеты в них. Установить характер бесконечно удаленной точки и найти вычеты в ней. Задача 6. Вычислить интеграл. .
Характеристики домашнего задания
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

 stud-msc.help
stud-msc.help


















