Другое 112: 112Г - Проектирование и исследование механизмов подъема и поворота схвата манипулятора вариант Г
-61%
Описание
Задание
Спроектировать и исследовать механизм подъема и поворота схвата манипулятора. Определить закон движения, провести силовой анализ механизмов, спроектировать зубчатую передачу, рассчитать параметры кулачкового механизма.
Реферат
Пояснительная записка к курсовому проекту «Проектирование и исследование механизмов подъема и поворота схвата манипулятора» содержит 43 страницы, 29 рисунков, 6 таблиц, 5 приложений. В пояснительной записке приведено: проектирование основного механизма подъема манипулятора, определение закона движения звена приведения, кинетостатический силовой расчет основного рычажного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного механизма, проектирование кулачкового механизма с поступательно движущимся толкателем.
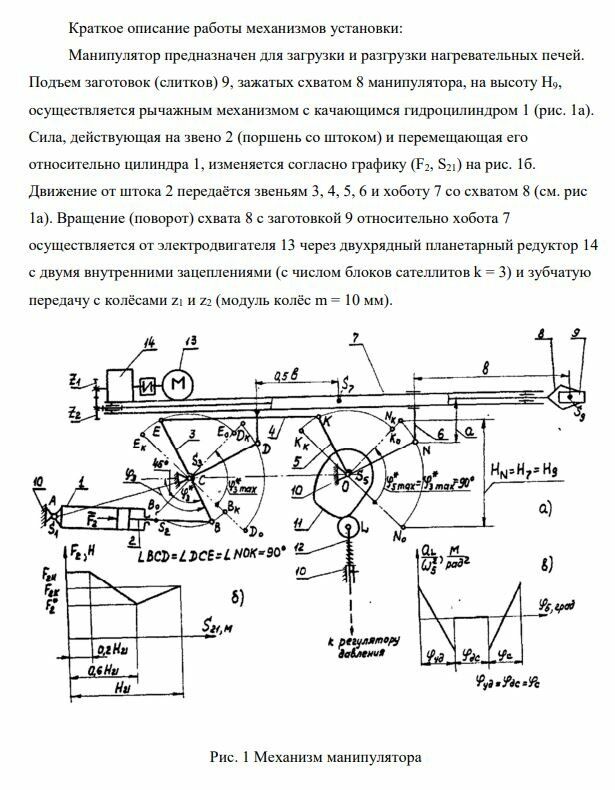
Краткое описание работы механизмов установки:
Манипулятор предназначен для загрузки и разгрузки нагревательных печей. Подъем заготовок (слитков) 9, зажатых схватом 8 манипулятора, на высоту H9, осуществляется рычажным механизмом с качающимся гидроцилиндром 1 (рис. 1а). Сила, действующая на звено 2 (поршень со штоком) и перемещающая его относительно цилиндра 1, изменяется согласно графику (F2, S21) на рис. 1б. Движение от штока 2 передаётся звеньям 3, 4, 5, 6 и хоботу 7 со схватом 8 (см. рис 1а). Вращение (поворот) схвата 8 с заготовкой 9 относительно хобота 7 осуществляется от электродвигателя 13 через двухрядный планетарный редуктор 14 с двумя внутренними зацеплениями (с числом блоков сателлитов k = 3) и зубчатую передачу с колёсами z1 и z2 (модуль колёс m = 10 мм).
Давление в гидроцилиндре 1 устанавливается регулятором давления, золотник которого кинематически связан с толкателем 12 кулачкового механизма. Кулачок 2 жестко связан с коромыслом 5. Закон движения толкателя дан на рис. 1в. Допустимый угол давления [υ]=30°. При удалении толкателя сила F2 изменяется от начального F2H до конечного F2K значения (рис. 1б), т.е. угол φуд соответствует перемещению S21=0.8H21.![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Спроектировать и исследовать механизм подъема и поворота схвата манипулятора. Определить закон движения, провести силовой анализ механизмов, спроектировать зубчатую передачу, рассчитать параметры кулачкового механизма.
Реферат
Пояснительная записка к курсовому проекту «Проектирование и исследование механизмов подъема и поворота схвата манипулятора» содержит 43 страницы, 29 рисунков, 6 таблиц, 5 приложений. В пояснительной записке приведено: проектирование основного механизма подъема манипулятора, определение закона движения звена приведения, кинетостатический силовой расчет основного рычажного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного механизма, проектирование кулачкового механизма с поступательно движущимся толкателем.
Краткое описание работы механизмов установки:
Манипулятор предназначен для загрузки и разгрузки нагревательных печей. Подъем заготовок (слитков) 9, зажатых схватом 8 манипулятора, на высоту H9, осуществляется рычажным механизмом с качающимся гидроцилиндром 1 (рис. 1а). Сила, действующая на звено 2 (поршень со штоком) и перемещающая его относительно цилиндра 1, изменяется согласно графику (F2, S21) на рис. 1б. Движение от штока 2 передаётся звеньям 3, 4, 5, 6 и хоботу 7 со схватом 8 (см. рис 1а). Вращение (поворот) схвата 8 с заготовкой 9 относительно хобота 7 осуществляется от электродвигателя 13 через двухрядный планетарный редуктор 14 с двумя внутренними зацеплениями (с числом блоков сателлитов k = 3) и зубчатую передачу с колёсами z1 и z2 (модуль колёс m = 10 мм).
Давление в гидроцилиндре 1 устанавливается регулятором давления, золотник которого кинематически связан с толкателем 12 кулачкового механизма. Кулачок 2 жестко связан с коромыслом 5. Закон движения толкателя дан на рис. 1в. Допустимый угол давления [υ]=30°. При удалении толкателя сила F2 изменяется от начального F2H до конечного F2K значения (рис. 1б), т.е. угол φуд соответствует перемещению S21=0.8H21.


Файлы условия, демо
Характеристики учебной работы
Тип
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
530
Размер
2,48 Mb
Список файлов
Курсовой проект вариант №112Г (Проектирование и исследование механизмов подъема и поворота схвата манипулятора)
Capture.JPG
Лист 1.pdf
Лист 2.pdf
Лист 3.pdf
Лист 4.pdf
РПЗ.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
09 сентября 2021 в 01:52
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!