Курсовая работа 100: Проектирование и исследование механизмов мундштучной стержневой машины вариант Б
-50%
Описание
Проектирование и исследование механизмов мундштучной стержневой машины
Содержание
- Техническое задание
- Исходные данные
- Аннотация (реферат)
- Введение
- Функциональные части машины
- 1 Структурный анализ механизмов
- 1.1 Рычажный механизм
- 1.2 Кулачковый механизм
- 1.3 Зубчатая передача
- 1.4 Планетарный редуктор
- 1.5 Избыточные связи в рычажном механизме
- 1.6 Избыточные связи в кулачковом механизме
- 1.7 Избыточные связи в зубчатой передаче Z1- Z2
- 1.8 Избыточные связи в планетарном редукторе
- 2.Проектирование основного механизма и определение закона движения
- 2.1 Проектирование механизма по заданным условиям
- 2.2 Построение графика аналога скоростей рабочего звена
- 2.3 Построение диаграммы сил сопротивления, в зависимости от положения ползуна
- 2.4 Определение приведенного момента движущих сил
- 2.5 Суммарная работа
- 2.6 График переменных приведенных моментов инерции IIIпр звеньев II группы
- 2.7 График полной кинетической энергии Т() всего механизма
- 2.8 График кинетической энергии ТII () II группы звеньев
- 2.9 График кинетической энергии первой группы звеньев ТI ()
- 2.10 График (приближенный) угловой скорости
- 2.11 Определение кинетической энергии механизма в начальный момент времени
- 2.12 Выбор электродвигателя и учет его механической характеристики
- 3.Силовой расчет механизма
- 3.1. Исходные данные для силового расчёта механизма
- 3.1. Построение планов скоростей и ускорений
- 3.2.1 Построение плана скоростей
- 3.2.2 Построение плана ускорений
- 3.3 Определение главных векторов и главных моментов сил инерции
- 3.4 Кинетостатический силовой расчет механизма
- 3.4.1 Силовой расчет группы звеньев 4-5
- 3.4.2 Силовой расчет группы звеньев 2-3
- 3.4.3 Силовой расчет начального звена 1
- 4. Проектирование зубчатых передач планетарного редуктора
- 4.1 Построение профиля зуба колеса, изготовляемого реечным инструментом
- 4.1.1 Расчет параметров зубчатой передачи
- 4.1.2 Построение станочного зацепления
- 4.2 Построение проектируемой зубчатой передачи
- 4.3 Расчет планетарного редуктора
- 5. Проектирование кулачкового механизма
- 5.1 Построение кинематических диаграмм методом графического интегрирования
- 5.2 Определение основных размеров кулачкового механизма
- 5.3 Построение профиля кулачка
- Вывод
- Список использованной литературы
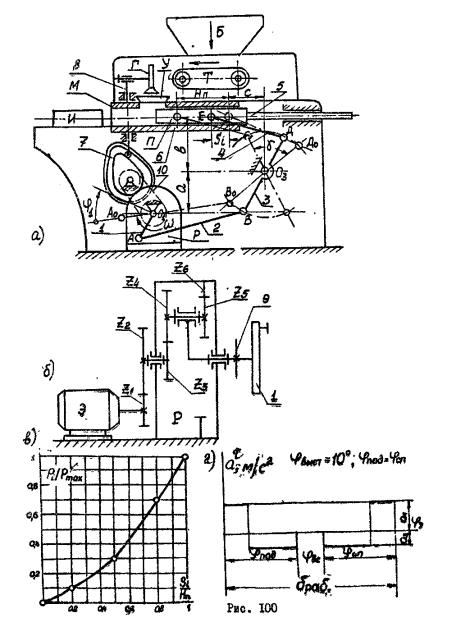
Техническое задание
Мундштучная стержневая машина типа ХТЗ предназначена для изготовления стержней постоянного сечения в формовочном производстве литейных цехов.Стержневая смесь загружается в бункер Б машины (рис. 100а) и ленточным транспортером Т подается в приемную воронку У. Плунжеры П, закрепленные на общем ползуне 5, совершают возвратно-поступательное движение по направляющим 6. Во время рабочего хода плунжеры через мундштуки-насадки М проталкивают порции смеси, уплотняя ее и образуя стержни. Сформованные стержни на приемном столе И разрезаются на куски определенной длины и далее транспортируются на сушку.
Ползун 5 приводится в движение рычажным механизмом, состоящим из кривошипа I, шатунов 2, 4 и коромысла 3, от электродвигателя Э (рис. 100б) через зубчатую передачу Z1, Z2 и планетарный редуктор Р с колесами Z3-Z6.
Для предотвращения зависания в воронке V подаваемой смеси установлен разрыхлитель Г с пальцами, который получает движение от кулачкового механизма с толкателем 8 и кулачком 7. Кулачок 7 получает движение от вала кривошипа через цепную передачу 10 со звездочкой 9.
График изменения давления (Pi/Pmax, Si/H) прессования смеси представлен на рис. 100в, а график изменения ускорения ( aτ ,φ7) толкателя -на рис. I00г. Масса звеньев механизма и моменты их инерции даны ориентировочно. Положения центров масс звеньев считать посередине. Массой и моментами инерции звеньев, значения которых не заданы, в расчетах пренебречь.
Исходные данные
| № | Наименование параметра | Обозна-чение | Единицы СИ | Значение |
| 1 | Максимальная длина хода плунжера П | Hn | м | 0,350 |
| 2 | Частота вращения кривошипа I | nкр | c-1 | 3,7 |
| 3 | Частота вращения электродвигателя | nэ | c-1 | 24 |
| 4 | Максимальное давление прессования | Pmax | МПа | 0,58 |
| 5 | Диаметр плунжера | d | м | 0,032 |
| 6 | Число плунжеров | i | - | 8 |
| 7 | Угол размаха коромысла 3 | γ | град | 75 |
| 8 | Длина коромысла 3 | LBO3 | м | 0,360 |
| 9 | Длина шатуна 4 | lDE | - | 0,310 |
| 10 | Размер | a | м | 0,490 |
| 11 | Размер | b | м | 0,310 |
| 12 | Размер | c | м | 0,140 |
| 13 | Масса шатуна 2 | m2 | кг | 26 |
| 14 | Масса коромысла 3 | m3 | кг | 20 |
| 15 | Масса ползуна 5 | m5 | кг | 38 |
| 16 | Суммарный момент инерции маховика, планетарного редуктора, зубчатых колес и ротора электродвигателя, приведенный к валу кривошипа I | IпрI | кг*м2 | 17 |
| 17 | Момент инерции шатуна 2 | I2s | кг*м2 | 0,9 |
| 18 | Момент инерции коромысла 3 | I30 | кг*м2 | 0,7 |
| 19 | Максимально допустимый угол давления в кулачковом механизме | φ1 | град | 40 |
| 20 | Соотношения между величинами ускорений толкателя | λ=a1/a2 | - | 2,0 |
| 21 | Частота вращения кулачка | nk | с-1 | 7,4 |
| 22 | Ход толкателя кулачкового механизма | h | м | 0,020 |
| 23 | Число сателлитов в планетарном редукторе | K | - | 3 |
| 24 | Модуль зубчатых колес | m | м | 5 |
| 25 | Число зубьев зубчатых колес | Z1 | - | 12 |
| Z2 | - | 21 | ||
| 26 | Коэффициент изменения средней скорости плунжера | Kv | - | 1,15 |
Введение
В комплексных заданиях курсового проекта объект проектирования разбит на основные узлы, и для каждого из них рекомендована структурная схема механизма, наиболее удовлетворяющая исходным условиям. В числе этих механизмов могут быть рычажный и кулачковый, зубчатая передача и планетарный зубчатый механизм.Выполнение курсового проекта предусматривает кинематическое проектирование, динамические и силовые расчеты механизмов. Проектирование механизма завершается построением его кинематической схемы с размерами для дальнейшего конструктивного оформления и прочностного расчета деталей механизма.
При выполнении проекта применяют аналитические и графические методы расчета. Аналитические методы позволяют получить любую требуемую точность результата. В настоящее время на кафедре теории механизмов МГТУ имеются программы расчетов кинематических и динамических параметров различных рычажных механизмов, сил в кинематических парах и износа контактирующих поверхностей, зубчатого зацепления и кулачковых механизмов.
Графические методы менее точны, но более наглядны, их применяют если нет возможности применить ЭВМ, а также для контроля правильности аналитического решения и при отладке программ для ЭВМ.
При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится.
Чертежи
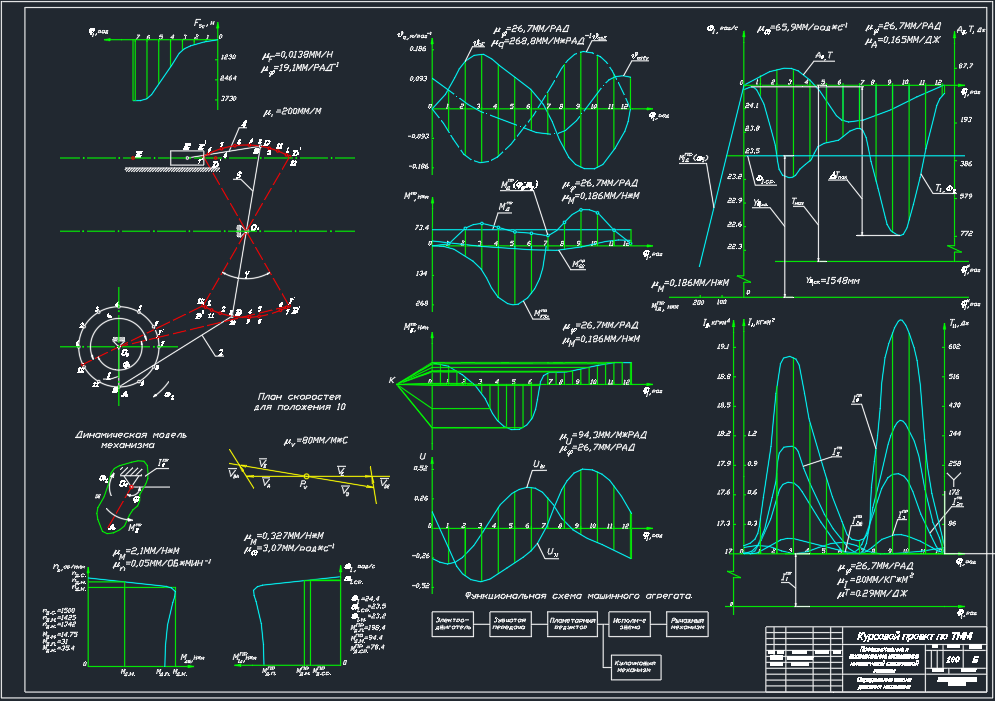
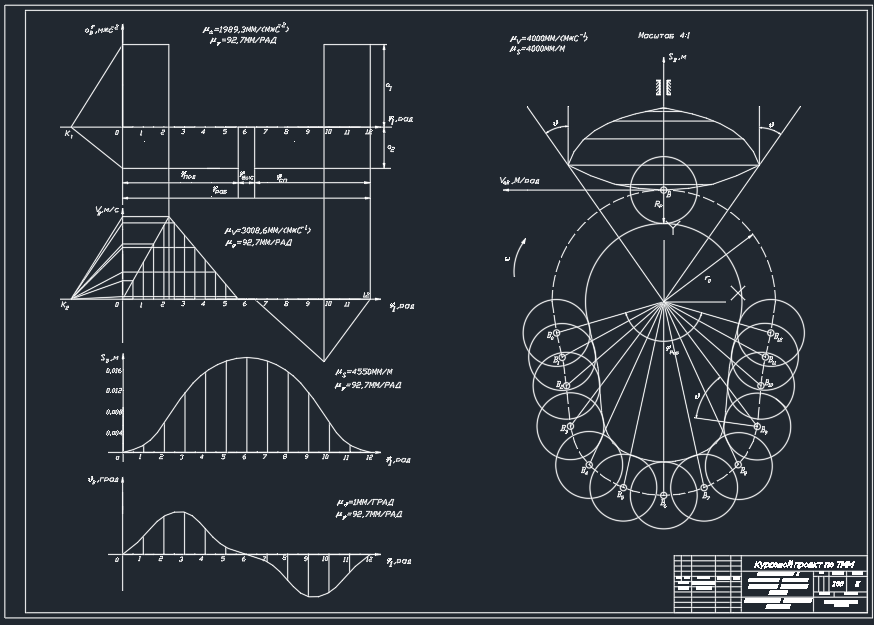
Лист 1 - Определение закона движения ![]()
Лист 2 - Силовой расчет ![]()

Лист 3 - Проектирование зубчатой передачи ![]()
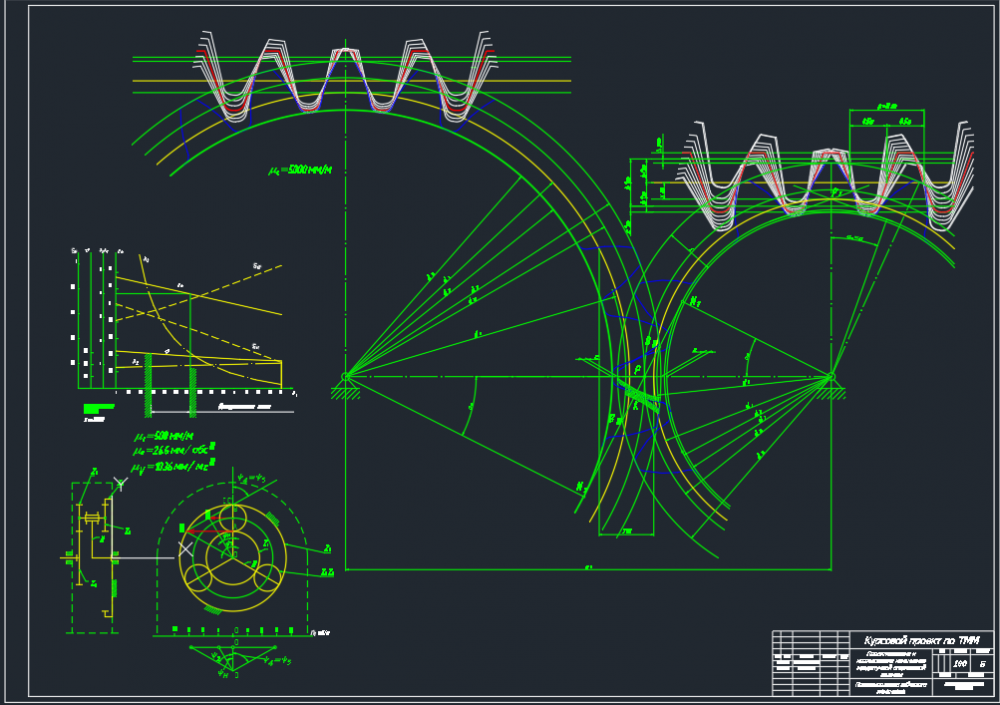
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
323
Размер
2,77 Mb
Список файлов
Проектирование и исследование механизмов мундштучной стержневой машины
DIADA.DI
Лист 1.dwg
Лист 2.dwg
Лист 3.dwg
Лист 4.dwg
Определение закона движения.xls
Проектирование зубчатой передачи.doc
Проектирование зубчатой передачи.xls
Проектирование редуктора.xmcd
РПЗ - Часть (1).doc
РПЗ - Часть (2).doc
Силовой расчет.xmcd

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:19
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!