ДЗ: Вариант 4.5.3 - ДЗ №2 - Система управления одноосного транспортного средства вариант 4.5.3
Описание
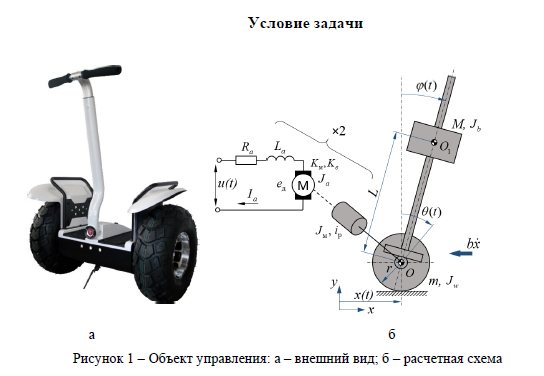
Объект управления представляет собой двухколесное одноосное транспортное средство (ООТС) с электрическим приводом. На рисунке 1, б изображена расчетная схема для данного ООТС. Рассматривается прямолинейное движение ООТС по ровной опорной поверхности. Колесо катится без проскальзывания. Условно предполагается, что привод осуществляется двумя одинаковыми электродвигателями постоянного тока (ДПТ) через понижающие редукторы.
Задачи:
1) Разработать линеаризованную математическую модель (ММ) объекта управления в форме метода переменных состояния и синтезировать ПИД-регулятор поддержания угловой скорости качающейся части ООТС близкой нулю.
2) Разработать нелинейную ММ объекта управления.
3) Составить схему в пакете MATLAB/Simulink для системы управления с
4
нелинейной ММ и синтезировать ПИД-регулятор поддержания заданной поступательной скорости движения.
4) Протестировать полученную систему управления на удовлетворение следующим показателям качества:
- система должна быть устойчива в диапазоне заданных скоростей поступательного движения от 0 м/с до 5 м/с;
- время нарастания должно быть не более 20 секунд;
- время регулирования должно быть не более 40 секунд;
- перерегулирование не должно превышать 40%.

Характеристики домашнего задания
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Вариант
Просмотров
17
Качество
Идеальное компьютерное
Размер
1,72 Mb
Список файлов
dz_2_ivanovich.pdf
 Mishkekus
Mishkekus
04 марта 2021 в 03:26
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!


















