Курсовая работа 77: Проектирование и исследование механизмов рулевого гидропривода вариант В
Описание
Проектирование и исследование механизмов рулевого гидропривода
Содержание
Техническое задание
1. Определение закона движения механизма
1.1. Постановка задачи
1.2. Метрический синтез
1.2.1. Исходные данные
1.2.2. Определение размеров механизма
1.3. Определение кинематических передаточных функций
1.4 Выбор динамической модели механизма
1.5. Определение приведенных моментов и суммарной работы
1.6. Определение приведенного момента инерции
1.7. Определение угловой скорости
1.8. Определение углового ускорения
1.9. Определение времени движения
2. Силовой расчет механизма
2.1. Исходные данные для силового расчета
2.2. Определение ускорений центров масс и угловых ускорений звеньев
2.2.1. Построение плана скоростей
2.2.2. Построение плана ускорений
2.3. Определение главных векторов и главных моментов сил инерции
2.4. Определение реакций в кинематических парах и движущей силы
2.5. Вычисление погрешности нахождения движущей силы
3. Проектирование зубчатой передачи и планетарного редуктора
3.1 Исходные данные
3.2 Геометрический расчет зубчатой передачи
3.3. Определение качественных показателей зубчатой передачи
3.4. Выбор коэффициентов смещения
3.5. Построение профиля зуба колеса, изготовляемого реечным инструментом
3.6. Построение проектируемой зубчатой передачи
3.7 Проектирование планетарного редуктора
3.7.1. Исходные данные
3.7.2. Подбор чисел зубьев
3.7.3. Проверка обеспечения передаточного отношения с требуемой точностью
3.7.4. Построение схемы планетарного механизма
4. Проектирование кулачкового механизма
4.1. Исходные данные
4.2. Построение кинематических диаграмм движения толкателя
4.3. Определение радиуса начальной шайбы кулачка графическим методом
4.4. Построение центрового и конструктивного профилей кулачка
4.5. Построение диаграммы изменения угла давления
5. Построение компоновочной схемы
Заключение
Список литературы
Приложения
Техническое задание
Гидравлический привод (рис. 77а) преобразует электрический сигнал управления в требуемое движение руля высоты летательного аппарата; он состоит из электродвигателя 5, планетарного редуктора 6-7-8-в, шестеренного насоса 9-10, гидродвигателя (гидроцилиндра) с рычажным (коромыслово – ползунным) механизмом 1-2-3-4 и золотникового устройства 11, регулирующего давление и расход жидкости в цилиндре 4.
При перемещении (по сигналу управления) золотника 11 из среднего (нейтрального) положения вправо рабочая жидкость нагнетается насосом по напорной гидролинии 12 через открытое рабочее (дросселирующее) окно в левую полость цилиндра, а из правой полости по гидролинии 13 сливается в бак 14, откуда опять поступает в насос; поршень 3 перемещается вправо под действием перепада давлений рабочей жидкости в цилиндре. При движении управляющего золотника из среднего положения влево поршень 3 также перемещается влево.
График зависимости перепада давлений в гидроцилиндре от перемещений поршня (в пределах от 0 до максимальной величины ) дан на рис.77б; величина начального перепада давлений должна быть определена по условию безударного останова механизма после поворота руля на заданный угол из положения I в положение II. Руль жестко связан с выходным звеном 1 рычажного механизма; нагрузка на него задана в виде момента сопротивления от угла поворота на рис.77в.
При проектировании и исследовании механизмов гидропривода считать известными параметры, приведенные в табл. 1.
В рулевом гидроприводе отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
![]() Рис.1. Схема механизма гидравлического привода
Рис.1. Схема механизма гидравлического привода
Объем и содержание курсового проекта
Лист 1. Проектирование основного механизма и определение закона его движения
Таблица 1 – Исходные данные
Содержание
Техническое задание
1. Определение закона движения механизма
1.1. Постановка задачи
1.2. Метрический синтез
1.2.1. Исходные данные
1.2.2. Определение размеров механизма
1.3. Определение кинематических передаточных функций
1.4 Выбор динамической модели механизма
1.5. Определение приведенных моментов и суммарной работы
1.6. Определение приведенного момента инерции
1.7. Определение угловой скорости
1.8. Определение углового ускорения
1.9. Определение времени движения
2. Силовой расчет механизма
2.1. Исходные данные для силового расчета
2.2. Определение ускорений центров масс и угловых ускорений звеньев
2.2.1. Построение плана скоростей
2.2.2. Построение плана ускорений
2.3. Определение главных векторов и главных моментов сил инерции
2.4. Определение реакций в кинематических парах и движущей силы
2.5. Вычисление погрешности нахождения движущей силы
3. Проектирование зубчатой передачи и планетарного редуктора
3.1 Исходные данные
3.2 Геометрический расчет зубчатой передачи
3.3. Определение качественных показателей зубчатой передачи
3.4. Выбор коэффициентов смещения
3.5. Построение профиля зуба колеса, изготовляемого реечным инструментом
3.6. Построение проектируемой зубчатой передачи
3.7 Проектирование планетарного редуктора
3.7.1. Исходные данные
3.7.2. Подбор чисел зубьев
3.7.3. Проверка обеспечения передаточного отношения с требуемой точностью
3.7.4. Построение схемы планетарного механизма
4. Проектирование кулачкового механизма
4.1. Исходные данные
4.2. Построение кинематических диаграмм движения толкателя
4.3. Определение радиуса начальной шайбы кулачка графическим методом
4.4. Построение центрового и конструктивного профилей кулачка
4.5. Построение диаграммы изменения угла давления
5. Построение компоновочной схемы
Заключение
Список литературы
Приложения
Техническое задание
Гидравлический привод (рис. 77а) преобразует электрический сигнал управления в требуемое движение руля высоты летательного аппарата; он состоит из электродвигателя 5, планетарного редуктора 6-7-8-в, шестеренного насоса 9-10, гидродвигателя (гидроцилиндра) с рычажным (коромыслово – ползунным) механизмом 1-2-3-4 и золотникового устройства 11, регулирующего давление и расход жидкости в цилиндре 4.
При перемещении (по сигналу управления) золотника 11 из среднего (нейтрального) положения вправо рабочая жидкость нагнетается насосом по напорной гидролинии 12 через открытое рабочее (дросселирующее) окно в левую полость цилиндра, а из правой полости по гидролинии 13 сливается в бак 14, откуда опять поступает в насос; поршень 3 перемещается вправо под действием перепада давлений рабочей жидкости в цилиндре. При движении управляющего золотника из среднего положения влево поршень 3 также перемещается влево.
График зависимости перепада давлений в гидроцилиндре от перемещений поршня (в пределах от 0 до максимальной величины ) дан на рис.77б; величина начального перепада давлений должна быть определена по условию безударного останова механизма после поворота руля на заданный угол из положения I в положение II. Руль жестко связан с выходным звеном 1 рычажного механизма; нагрузка на него задана в виде момента сопротивления от угла поворота на рис.77в.
При проектировании и исследовании механизмов гидропривода считать известными параметры, приведенные в табл. 1.
В рулевом гидроприводе отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
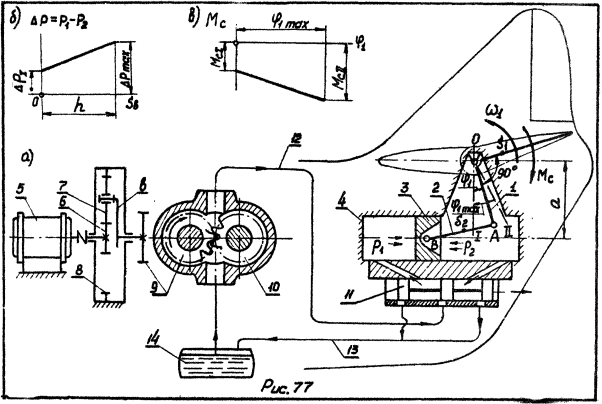 Рис.1. Схема механизма гидравлического привода
Рис.1. Схема механизма гидравлического привода Объем и содержание курсового проекта
Лист 1. Проектирование основного механизма и определение закона его движения
- Определение основных размеров звеньев механизма по заданным условиям.
- Определение закона движения механизма при неустановившемся режиме. (построение диаграммы изменения угловой скорости и углового ускорения звена приведения за время работы механизма).
- Построение диаграммы времени движения.
- Определение углового ускорения звена приведения по уравнению движения в заданном положении механизма. Определение линейных ускорений центров тяжести и угловых ускорений звеньев.
- Построение картины силового нагружения механизма.
- Определение сил в кинематических парах механизма.
- Оценка точности расчетов, выполненных на первом и втором листах проекта, по уравнению сил, составленному для звена приведения.
- Выполнение геометрического расчета эвольвентной зубчатой передачи при нарезании колес инструментом со стандартным исходным производящим контуром.
- Построение схемы станочного зацепления при нарезании колеса с меньшим числом зубьев и профилирование зуба (включая галтель) методом огибания.
- Вычерчивание схемы зацепления колес с указанием основных размеров и элементов колес в передачи.
- Проектирование планетарного редуктора (подбор чисел зубьев) по заданному передаточному отношению его и числу сателлитов.
- Построение треугольников линейных скоростей звеньев спроектированного редуктора. Проверка передаточного отношения графическим способом.
- Построение кинематических диаграмм движения толкателя (ускорения, скорости, перемещения) по заданному закону изменения ускорения толкателя.
- Определение основных размеров кулачкового механизма наименьших габаритов с учетом максимально допустимого угла давления.
- Построение профиля кулачка (центрового и конструктивного).
- Построение диаграммы изменения угла давления от угла поворота кулачка.
Таблица 1 – Исходные данные
| № | Наименование параметра | Обозна- чение | Размер- ность | Числовые значения для варианта В |
| 1 | Максимальный угол поворота звена 1 | | град | 25 |
| 2 | Ход поршня, соответствующий величине f1 max | h | м | 0.045 |
| 3 | Отношение длины звеньев | lOA/lAB | - | 1.15 |
| 4 | Диаметр цилиндра 4 | d | м | 0.036 |
| 5 | Масса звеньев 1, 3 | m1 | кг | 30 |
| m3 | кг | 0.35 | ||
| 6 | Вес единицы длины звена 2 | q | кг/м | 8 |
| 7 | Расстояние от оси вращения O до центра масс S1 звена 1 | lOS1 | м | 0.13 |
| 8 | Отношение расстояния от точки А до центра масс S2 шатуна к длине шатуна | lAS2/lAB | - | 0.5 |
| 9 | Момент инерции звена 1 относительно оси, проходящей через его центр масс | I1S | Кг*м2 | 2.746 |
| 10 | Максимальный перепад давлений в цилиндре (в положении II механизма) | Pmax | Мпа | 11.772 |
| 11 | Момент сопортивления приложенный к звену I: в положении I | MCI | Н*м | 200 |
| MCII | H*м | 1600 | ||
| 12 | Угловая координата звена I для силового расчета механизма | f1 | град | 20 |
| 13 | Числа зубьев колес 9, 10 | Z9=Z10 | - | 10 |
| 14 | Модуль зубчатых колес 9, 10 | m | мм | 4.5 |
| 15 | Число оборотов вала электродвигателя | nд | об/мин | 2800 |
| 16 | Число оборотов выходного вала редуктора | nв | об/мин | 700 |
| 17 | Число сателлитов редуктора | k | - | 3 |
| 18 | Параметры исходного производящего контура | ha* | - | 1.0 |
| c* | - | 0.25 | ||
| a | град | 20 |
Файлы условия, демо
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
31
Размер
6,85 Mb
Преподаватели

Список файлов
Чертежи компас
1лист.cdw
1лист.cdw.bak
2лист.cdw
2лист.cdw.bak
3лист.cdw
3лист.cdw.bak
4лист.cdw
4лист.cdw.bak
5лист.cdw
5лист.cdw.bak
Лист (1).dwg
Лист (1).frw
Лист (1).frw.bak
Лист (2).dwg
Лист (2).frw
Лист (2).frw.bak
Лист (3).dwg
Лист (3).frw
Лист (3).frw.bak
Лист (4).dwg
read me.txt
РПЗ.docx
 ichiginyov
ichiginyov
23 сентября 2024 в 16:35
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!


















