Курсовая работа 73: Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами вариант Д
-50%
Описание
Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами
Содержание
- Реферат …………………………………. ……………………………….………….3
- Краткое описание механизмов рулевой машины…..………………….………… 4
- Исходные данные……………………………………………………….………......6
- 1. Проектирование основного механизма рулевой машины и определение закона движения его начального звена……….8
- 1.1 Проектирование кинематической схемы и определение длин звеньев механизма………..….. 8
- 1.2 Расчет кинематических передаточных функций скоростей……..……….……9
- 1.3 Построение графиков суммарных приведенных момента и работы………... 10
- 1.4 Определение приведенного момента инерции звеньев ………………………11
- 1.5 Построение графика угловой скорости звена приведения в функции обобщенной координаты ……...13
- 1.6 Построение графика времени в функции обобщенной координаты………....14
- 1.7 Построение графика углового ускорения звена приведения в функции обобщенной координаты…...……….14
- 2. Силовой расчет механизма рулевой машины……..…………………………...16
- 2.1 Исходные данные для силового расчета……………………..…………………16
- 2.2 Построение плана скоростей механизма ..…………… ………………......…..16
- 2.3 Построение плана ускорений механизма…………………………...………….17
- 2.4 Определение сил инерции………………………………………..…..…………18
- 2.5 Определение главных моментов сил инерции………………….………..….. . 18
- 2.6 Определение реакций в кинематических парах……………….…….…..….....18
- 2.6.1 Группы звеньев 2-3……………………………………….………….….…..19
- 2.6.2 Начальное звено………………………………………….…………….…....19
- 2.7 Расчет погрешности в определении движущего момента …….….…………. 20
- 3. Проектирование зубчатых механизмов..……………………………….…..……21
- 3.1 Исходные данные для проектирования.………………………………...……...21
- 3.2 Геометрический расчет эвольвентной зубчатой передачи…..………....….…21
- 3.3 Выбор коэффициента смещения по качественным показателям……….....…22
- 3.4 Результаты расчета зубчатой передачи……………………………...…………23
- 3.5 Построение станочного и зубчатого зацеплений ……………………………..24
- 3.6 Проектирование планетарного редуктора…………..……………...…….……24
- 3.6.1 Исходные данные………………………………………………………….. 24
- 3.6.2 Расчет числа зубьев колес……………………………...………………..…25
- 4. Проектирование кулачкового механизма…………….……………………..…..27
- 4.1 Исходные данные для проектирования………………………………………...27
- 4.2 Построение кинематических диаграмм методом графического интегрирования ……28
- 4.3 Определение основных размеров кулачкового механизма….…………...…... 29
- 4.4 Построение профиля кулачка …………..…………………………………..…..30
- 4.5 Построение графика изменения угла давления ……………..……..………….31
- Заключение…………………………………………………………….…..……………32
- Список используемой литературы………………………………...……..…………....33
Реферат
Расчетно-пояснительная записка к курсовому проекту “Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами” содержит 33 листа машинописного текста, рисунков, таблиц. В состав курсового проекта входят: данная расчетно-пояснительная записка и 4 листа формата А1 с необходимыми графическими расчетами и зависимостями.В расчетно-пояснительной записке проведено проектирование механизма рулевой машины, исследовано его движение и определены управляющие силовые воздействия, проведено проектирование эвольвентной цилиндрической зубчатой передачи, проектирование двухрядного планетарного редуктора и проектирование кулачкового механизма.
Краткое описание механизмов рулевой машины
Корректировка траектории полета летательного аппарата производится за счет изменения направления потока газов, выходящих их уголковых сопел. Схема расположения уголковых сопел и их привод представлены на рис. 73а. поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление поворота и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться.При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону.
Движение от электродвигателя 7 через планетарный редуктор 6 (схема редуктора изображена на рис. 73 в) и зубчатые колеса 5, 4 передается валу 0, на котором закреплено звено 1 стержневого механизма ОАВС. Звено 1, поворачиваясь на некоторый угол вокруг оси 0, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20˚ (рис. 73 б).
При повороте уголкового сопла из начального положения I в конечное положение II (рис. 73б) на угол на звено 3 действует момент и момент от сил трения , зависимость которых от угла поворота предаставлена диаграммой ( ,) (рис. 73г).
В начальном положении механизма приведенный к звену 1 момент электродвигателя в 1.25 раза больше приведенного момента сопротивления. Электродвигатель должен обеспечить безударный останов уголкового сопла в конечном положении. При проектировании и исследовании механизмов управления считать известными параметры, приведенные в таблице 1.
В механизмах управления летательного аппарата отсутствует кулачковый механизм, проектирование которого проводится по дополнительному заданию.
Примечания: 1. Проектирование основного четырехшарнирного механизма ОАВС производится по двум крайним (мертвым) положениям механизма по заданному максимальному углу качания коромысла ВС ().
2. При определении закона движения механизма угол разделить на 7 равных интервалов.
3. При проектировании зубчатой передачи шестеренного насоса с целью уменьшения вредного влияния защемленных объемов жидкости рекомендуется обеспечить величину коэффициента перекрытия в пределах =1,10÷1,20.

![]() Исходные данные
Исходные данные
Таблица 1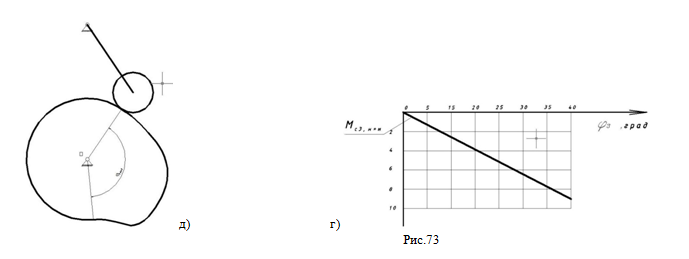
| Наименование параметра | Обозна- чение | Размер-ность СИ | Число-вые значе- ния СИ |
| Максимально возможный угол поворота звена 3 (рис. 73а) (для проектирования механизма) | град | 45 | |
| Рабочий угол поворота звена 3 (рис. 73б) (из положения I в положение II) | | град | 40 |
| Длина коромысла 3 | | м | 0,095 |
| Расстояние между точками О и С механизма | | м | 0,16 |
| Вертикальная проекция расстояния между точками О и С | а | м | 0,11 |
| Отношение расстояния от точки А до центра масс S2 шатуна 2 к длине шатуна (рис. 73б) | | - | 0,45 |
| Веса звеньев: балансира 1 и колеса 4 шатуна 2 коромысла 3 и уголкового сопла | G1 G2 G3 | Н Н Н | 14,5 7,50 20,0 |
| Моменты инерции звеньев относительно осей, проходящих через их центры масс: звена 1 звена 2 звена 3 | J1S J2S J3S | кг×м2 кг×м2 кг×м2 | 0,0021 0,0026 0,0250 |
| Момент инерции колеса 5 и приведенные к валу 5 моменты инерции планетарного редуктора и ротора двигателя | J5 | кг×м2 | 0,006 |
| Максимальная величина момента сопротивления, приложенного к звену 3 | Мс3 max | Н×м | 9,0 |
| Угловая координата балансира 3 для силового расчета (рис.73б) | град | 35 | |
| Числа зубьев колес 4 и 5 | z4 z5 | - - | - - |
| Модуль зубчатых колес 4 и 5 | m | - | - |
| Передаточное отношение планетарного редуктора | | - | -20 |
| Число сателлитов в планетарном редукторе | K | - | 3 |
| Модуль зубчатых колес в редукторе | m | - | - |
| Параметры исходного производящего контура | | - - - | - - - |
| Число оборотов кулачка | n | - | - |
| Угол рабочего профиля кулачка | | рад | 2.98 |
| Перемещение толкателя (перемещение точки В) (рис. 73д). | h | м | 0.024 |
| Длина рычага толкателя (рис. 73д) | | м | 0,075 |
| Максимально допустимый угол давления в кулачковом механизме | [] | рад | 0.559 |
Чертежи
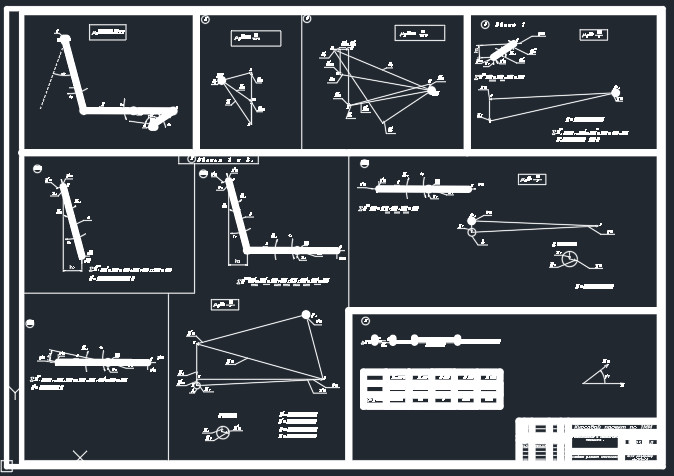
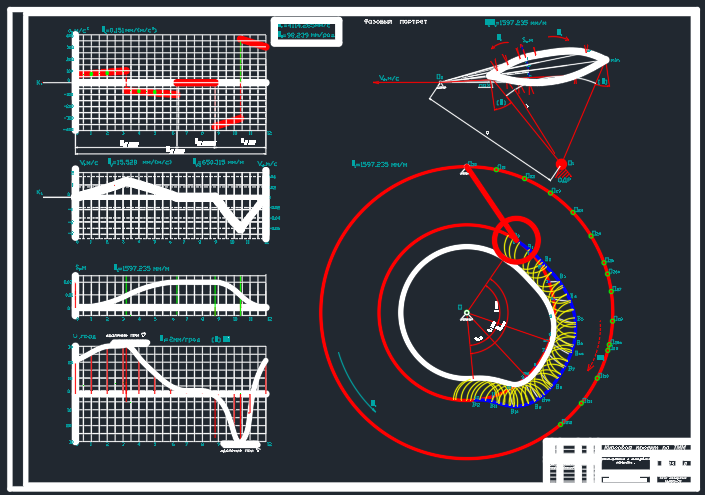
Лист 1 - Определение закона движения ![]()
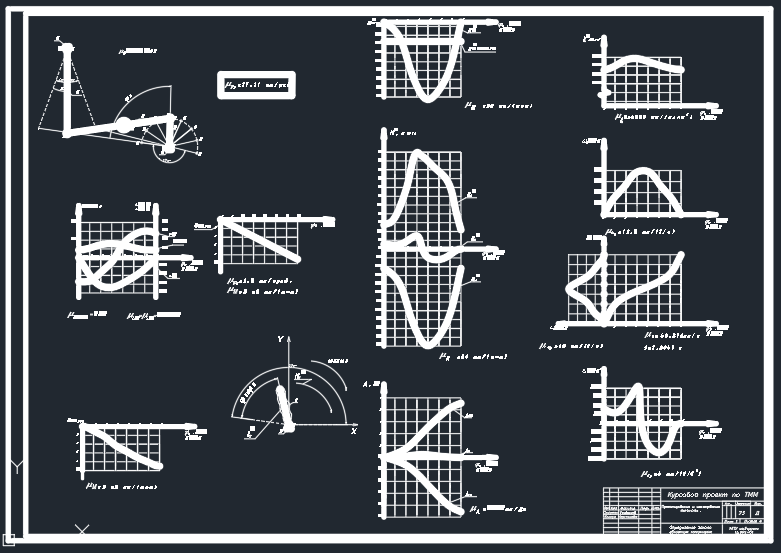
Лист 2 - Силовой расчет ![]()
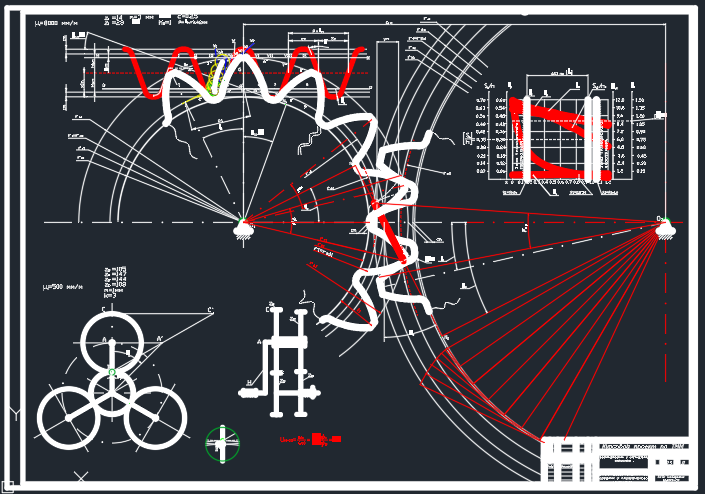
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
726
Качество
Идеальное компьютерное
Размер
1,41 Mb
Список файлов
РПЗ.docx
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg
Вам все понравилось? Получите кэшбэк - 40 рублей на Ваш счёт при покупке. Поставьте оценку и напишите положительный комментарий к купленному файлу. После Вы получите деньги на ваш счет.
 polosatik
polosatik
21 августа 2013 в 20:43
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
Статически неопределимые задачи изгиба
Всё верно
Отзыв
Сборочная размерная цепь + Подетальная размерная цепь
Все выполнено на высшем уровне, зачли с первого раза. Спасибо!
Отзыв
Кривые и поверхности второго порядка
Зачли, я довольна)
Отзыв
Исследование функций
Зачли, я довольна)
Отзыв
Линейная алгебра
Зачли, я довольна)



















