Курсовая работа 55: Проектирование и исследование опорного механизма шасси вариант А
Описание
Опорный механизм - шасси, предназначен для убирания и выпуска колес во время движения.
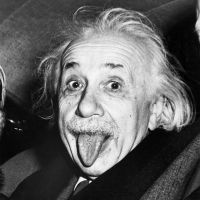
Основной механизм (1-2-3-4) (рис.1.1а) является двухкоромысловым четырехзвенником с колесом 5, центр которого расположен в точке D ведомого коромысла 3. Ведущее коромысло 1 приводится в движение от электродвигателя 6 (рис.1б) при помощи планетарного редуктора 7 и зубчатой передачи Z5, Z6. Включение электромагнитной муфты 8, соединяющей при убирании и выпуске колес электродвигатель 6 и редуктор 7, производится посредством концевых выключателей (на схеме не показаны).
![]() Рис. 1.
Рис. 1.
При движении на опорный механизм действуют силы сопротивления воздуха, равнодействующая Р которых, приложенная к центру D колеса 5, может быть приближенно подсчитана по формуле: P=P0·cosDf3,где P0- начальная сила сопротивления,
Df3 - угол отклонения звена 3 от его начального положения CB'.
В проекте рассматривается неустановившийся режим работы опорного механизма в процессе убирания колес. В этом случае сила Р способствует работе электродвигателя. Величина момента электродвигателя (Мд=const) определяется из условия безударного останова механизма ( w1 кон = 0 ). Момент сил трения в кинематических парах, приведенный к звену 1 и принятый постоянным (Мтрпр=const), и силы тяжести Gi звеньев препятствуют процессу убирания колес.
В начальном положении механизма шарниры О, А', и В' расположены на одной прямой. За время убирания колес звено 1 повернется на угол (Dj1)max=(j1''-j1'), звено 3 - на угол (j3''-j3')=90°.
Синтез основного механизма (определение размеров звеньев 1, 2, 3) производится по двум положениям ведущего 1 и ведомого 3 звеньев, что является частным случаем синтеза шарнирного четырехзвенника по трем положениям этих же звеньев.
При проектировании сначала определяются размеры звена 3 (lBC и lDC) по известным lOC, углу j1', u lDC/lBC . Размеры звеньев 1 и 2 (lОА и lАВ) находят графически методом обращенного движения, сообщая всей системе вращение вокруг оси О с угловой скоростью (-w1) (рис. 1.1в). Точка А' звеньев 1 и 2 является центром окружности, проходящей через точки B' u B'', и лежит на пересечении перпендикуляра к середине хорды B'B'' с прямой ОВ'.
Принять lАS2 = lS2В .
В данной установке отсутствует кулачковый механизм. Проектирование кулачкового механизма провести по заданию №54.
Таблица 2
Рис.2
![]() Кулковыймеханизм (рис.54д), закон движения толкателя 18 которого в пределах рабочего угла поворота φPкулачка I7 представлен на рис.54е
Кулковыймеханизм (рис.54д), закон движения толкателя 18 которого в пределах рабочего угла поворота φPкулачка I7 представлен на рис.54е
Основной механизм (1-2-3-4) (рис.1.1а) является двухкоромысловым четырехзвенником с колесом 5, центр которого расположен в точке D ведомого коромысла 3. Ведущее коромысло 1 приводится в движение от электродвигателя 6 (рис.1б) при помощи планетарного редуктора 7 и зубчатой передачи Z5, Z6. Включение электромагнитной муфты 8, соединяющей при убирании и выпуске колес электродвигатель 6 и редуктор 7, производится посредством концевых выключателей (на схеме не показаны).
 Рис. 1.
Рис. 1. При движении на опорный механизм действуют силы сопротивления воздуха, равнодействующая Р которых, приложенная к центру D колеса 5, может быть приближенно подсчитана по формуле: P=P0·cosDf3,где P0- начальная сила сопротивления,
Df3 - угол отклонения звена 3 от его начального положения CB'.
В проекте рассматривается неустановившийся режим работы опорного механизма в процессе убирания колес. В этом случае сила Р способствует работе электродвигателя. Величина момента электродвигателя (Мд=const) определяется из условия безударного останова механизма ( w1 кон = 0 ). Момент сил трения в кинематических парах, приведенный к звену 1 и принятый постоянным (Мтрпр=const), и силы тяжести Gi звеньев препятствуют процессу убирания колес.
В начальном положении механизма шарниры О, А', и В' расположены на одной прямой. За время убирания колес звено 1 повернется на угол (Dj1)max=(j1''-j1'), звено 3 - на угол (j3''-j3')=90°.
Синтез основного механизма (определение размеров звеньев 1, 2, 3) производится по двум положениям ведущего 1 и ведомого 3 звеньев, что является частным случаем синтеза шарнирного четырехзвенника по трем положениям этих же звеньев.
При проектировании сначала определяются размеры звена 3 (lBC и lDC) по известным lOC, углу j1', u lDC/lBC . Размеры звеньев 1 и 2 (lОА и lАВ) находят графически методом обращенного движения, сообщая всей системе вращение вокруг оси О с угловой скоростью (-w1) (рис. 1.1в). Точка А' звеньев 1 и 2 является центром окружности, проходящей через точки B' u B'', и лежит на пересечении перпендикуляра к середине хорды B'B'' с прямой ОВ'.
Принять lАS2 = lS2В .
В данной установке отсутствует кулачковый механизм. Проектирование кулачкового механизма провести по заданию №54.
Исходные данные
Таблица 1.| 1 | Угловые координаты в начальном положении механизма (рис. 55-1а): | |||
| ведущего коромысла 1 | j1' | град | 155 | |
| ведомого коромысла 3 | j3' | град | 90 | |
| 2 | Угловые координаты в конечном положении механизма: | |||
| ведущего коромысла 1 | j1" | град | 245 | |
| ведомого коромысла 3 | j3" | град | 180 | |
| 3 | Длина стойки | lOC | м | 1,60 |
| 4 | Отношение длин для звена 3 | lDC/lBC | - | 1,20 |
| 5 | Сила тяжести, действующая на звенья механизма: | |||
| коромысла 1 | G1 | Н | 490,5 | |
| шатуна 2 | G2 | Н | 686,7 | |
| коромысла 3 с колесом 5 | G3 | Н | 3924 | |
| 6 | Начальная сила сопротивления | P0 | Н | 2943 |
| 7 | Момент сил трения в кинематических парах механизма, приведенный к звену 1 | Mпртр | Н·м | 421,83 |
| 8 | Моменты инерции: | |||
| звена 2 | I2S | кг·м2 | 4,095 | |
| звена 3 с колесом 5 относительно оси С | I3C | кг·м2 | 313,92 | |
| 9 | Момент инерции вращающихся деталей (ротораБ редуктора, зубчатой передачи, муфты, коромысла 1), приведенный к валу О | Iпр0 | кг·м2 | 117,72 |
| 10 | Угловая координата для силового расчета (рис. 55-1а) | j1 | град | 30 |
| 11 | Числа зубьев колес | Z5 | - | 11 |
| Z6 | - | 18 | ||
| 12 | Модуль зубчатых колес | m | мм | 5 |
| 13 | Передаточное отношение планетарного редуктора | i16 | - | 13 |
| 14 | Число сателлитов в планетарном редукторе | K | - | 3 |
| Наименование параметра | Обозначение | Единица СИ | Числовые значения |
| Скорость вращения кулачкового вала | nк | об/мин | 1200 |
| Максимальный ход толкателя кулачкового механизма | hT | м | 0,010 |
| Максимально допустимый угол давления в кулачковом механизме | [q] | град | 30 |
| Угол рабочего профиля кулачка | φp | град | 120 |
| Радиус ролика | RP | м | 0,008 |
Рис.2
 Кулковыймеханизм (рис.54д), закон движения толкателя 18 которого в пределах рабочего угла поворота φPкулачка I7 представлен на рис.54е
Кулковыймеханизм (рис.54д), закон движения толкателя 18 которого в пределах рабочего угла поворота φPкулачка I7 представлен на рис.54еФайлы условия, демо
55a
К защите
Курсач
1
55_list-1.xmcd
list1.cdw
list1.cdw.bak
2
55-list-2.xmcd
list2-55a.cdw
list2-55a.cdw.bak
3
55-list-3.1.xmcd
55-list-3.2.xmcd
list3-55.dwg
list3-55.frw
list3-55a.cdw
4
list4.cdw
mashtab-list4.cdw
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
80
Размер
7,2 Mb
Преподаватели

Список файлов
55a
К защите
!!!.txt
Вопросы_к_защите.pdf
Курсач
1
55_list-1.xmcd
list-1.pdf
list-1.xls
list1.cdw
list1.cdw.bak
2
55-list-2.xmcd
list2-55a.cdw
list2-55a.cdw.bak
3
55-list-3.1.xmcd
55-list-3.2.xmcd
55.txt
list3-55.dwg
list3-55.frw
list3-55a.cdw
4
list4.cdw
mashtab-list4.cdw
рпз55a.doc
11x18x5_30_10_2023_13_49_17.dxf
55.rez#
KOMPAS - list2-55a.pdf
Vystuplenie.docx
ZubEx.exe — ярлык.lnk
11 декабря 2023 в 21:10
Отзывы
Отзыв
Как база для собственной работы хорошо, но надо конечно много дополнять и исправлять