Курсовой проект ТММ Проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой (Вариант 4А)
Описание

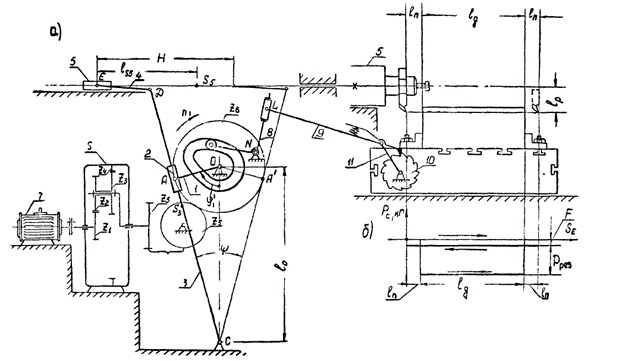 Рис. 2 Кинематическая схема станка
Рис. 2 Кинематическая схема станка При проектировании и исследовании механизмов привода подачи станка считать известными параметры, приведенные в Таблице 1.
Исходные данные
Таблица 1 Исходные данные| Наименование параметра | Обозначение | Размерность | Числовое значение |
| 1. Максимальная длина хода ползуна | H | м | 0,43 |
| 2. Длина перебега резца в долях от хода Н | Lп | м | 0,05Н |
| 3. Число оборотов кривошипа | n1 | об/мин | 71 |
| 4. Число оборотов электродвигателя | nэд | об/мин | 1420 |
| 5. Коэффициент изменения скорости ползуна | Kv | - | 1,40 |
| 6. Межосевое расстояние между опорами кривошипа и кулисы | Loc | м | 0,45 |
| 7. Сила резания | Pmax | H | 1800 |
| 8. Сила трения между ползуном и направляющими | F | H | 180 |
| 9. Вес ползуна | G5 | H | 720 |
| 10. Вес кулисы | G3 | Н | 180 |
| 11. Момент инерции кулисы относительно оси, проходящей через её центр тяжести | Is3 | 1,1 | |
| 12. Момент инерции шатуна относительно оси, проходящей через её центр тяжести | Is4 | 0,04 | |
| 13. Отношение расстояния от точки С до центра тяжести кулисы к длине кулисы | CS3/CD | - | 0,5 |
| 14. Отношение длины шатуна к длине кулисы | DE/CD | - | 0,34 |
| 15. Отношение расстояния от точки D до центра тяжести шатуна к длине шатуна | DS4/DE | - | 0,354 |
| 16. Координата центра тяжести ползуна | Ls5 | м | 0,18 |
| 17. Вылет резца | Lp | м | 0,10 |
| 18. Коэффициент неравномерности вращения кривошипа | - | ||
| 19. Маховой момент ротора электродвигателя | GDд^2 | 11,52 | |
| 20. Маховой момент зубчатых механизмов, приведенный к валу электродвигателю | GD^2 | 38,42 | |
| 21. Угловая координата для силового расчёта | ф1 | ⸰ | 120 |
| 22. Максимальный подъём толкателя | h | м | 0,043 |
| 23. Длина толкателя | Lbn | м | 0,135 |
| 24. Максимально допустимый угол давления толкателя | aдоп | ⸰ | 30 |
| 25. Максимальное соотношение между величинами ускорений толкателя | v=a1/a2 | - | 3 |
| 26. Число зубьев колеса 5 | z5 | - | 13 |
| 27. Число зубьев колеса 6 | z6 | - | 18 |
| 28. Модуль зубчатых колёс 5,6 | m | мм | 13 |
| 29. Число сателлитов в планетарном редукторе | K | - | 3 |
| 30. Параметры исходного контура реечного инструмента | a0 xи xc | ⸰ - - | 20 1 0,25 |
Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движении в горизонтальном направлении.
Для движения ползуна с резцовой головкой используется шестизвенный кривошипно- кулисный механизм с качающей 11 кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, шатуна 4 и ползуна 5. Диаграмма сил сопротивления движению ползуна 5 показана на Рис. 2б. Ход ползуна И выбирается в зависимости от длины 𝑙д, обрабатываемой поверхности с учетом перебегов 𝑙п, в начале и конце рабочего хода.
Длина хода ползуна может изменяться при наладке станка для обработки конкретных деталей. Средняя скорость резания (скорость поступательного движения при рабочем ходе) выбирается в зависимости от условий обработки.
Во время перебегов в конце холостого и в начале рабочего ходов осуществляется перемещение стола на величину подачи с помощью ходового винта. Поворот винта производится посредством храпового механизма, состоящего из колеса 10, рычага 11 с собачкой, тяги 9 и качающегося толкателя 8 (Рис. 2а). Поворот толкателя 8 осуществляется от дискового кулачка, который выполнен в виде паза в теле зубчатого колеса 2.
Регулирование подачи стола производится путем изменения длины рычага LМ, что позволяет изменять количество зубьев, захватываемых собачкой, и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектировании кулачкового механизма необходимо обеспечить заданный закон движения толкателя (Рис. 3) и осуществить подачу во время заднего перебега резца (в конце холостого и начале рабочего ходов) в соответствии с циклограммой, приведенной на Рис. 4.
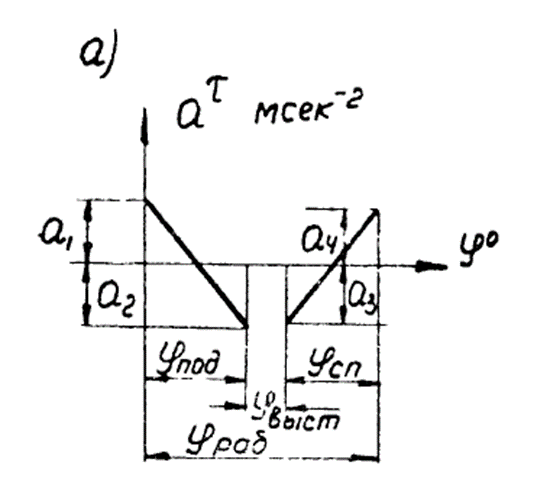
Рис. 3 Законы изменения ускорения толкателя кулачкового механизма
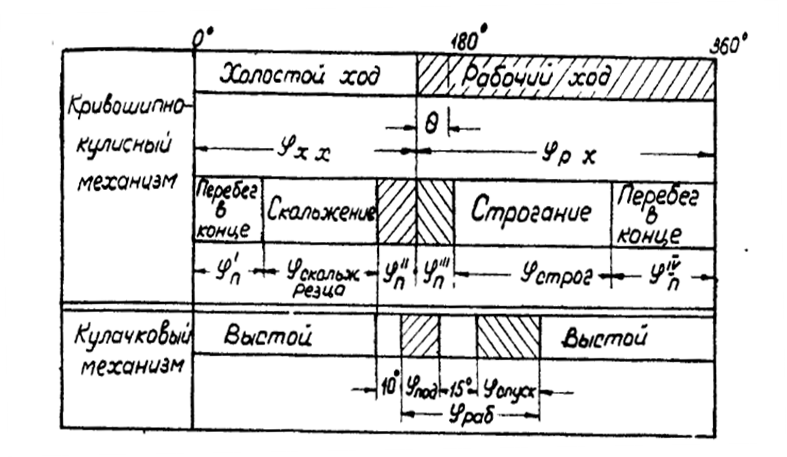
Рис. 4 Циклограмма работы механизмов станка
Дополнительная информация
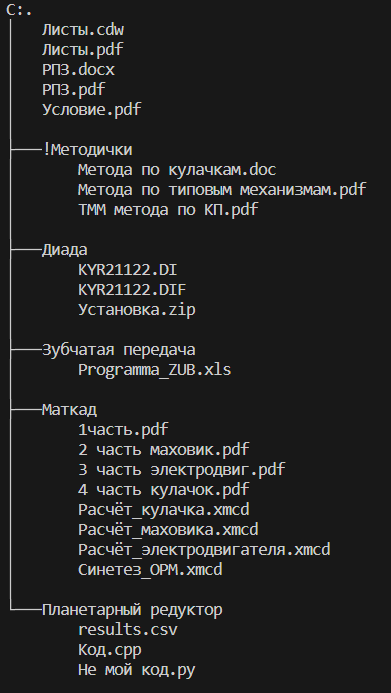
В архив входит:- РПЗ (Word, PDF)
Расчёты оформлены как вордовские формулы, все рисунки выполнены в электронном виде.
- Чертежи (4 листа) (Компас V20/21, PDF)
- Расчёты в Mathcad 15
Синтез рычажного механизма, Выбор электродвигателя, Расчёт маховика, Расчёт кулачка с качающейся кулисой
- Скрипт расчёта планетарного редуктора c выводом результатов в Excel таблицу (Python/С++)
- Скрипт для расчёта зубчатой передачи (Excel)
- Diada
Заполненные исходные данные, полученные результаты и ссылка на установку с инструкцией прямо на ПК
- Папка с методичками
Ключевые слова: Поперечно-строгальный станок, качающаяся кулиса, кривошипно-ползунный механизм, закон движения звена приведения, кинематические передаточные функции, кинетостатический силовой расчёт, эвольвентная зубчатая передача, планетарный двухрядный редуктор, кулачковый механизм, качающийся толкатель.Показать/скрыть дополнительное описание
Описание Защищено на отл Сащенко Д.В. в 2022 г. Оформление по ГОСТ В архив входит: - РПЗ (Word, PDF) Расчёты оформлены как вордовские формулы, все рисунки выполнены в электронном виде. - Чертежи (4 листа) (Компас V20/21, PDF) - Расчёты в Mathcad 15 Синтез рычажного механизма, Выбор электродвигателя, Расчёт маховика, Расчёт кулачка с качающейся кулисой - Скрипт расчёта планетарного редуктора c выводом результатов в Excel таблицу (Python/С++) - Скрипт для расчёта зубчатой передачи (Excel) - Diada Заполненные исходные данные, полученные результаты и ссылка на установку с инструкцией прямо на ПК - Папка с методичками Техническое задание Рис. 1 Общий вид станка Рис.
2 Кинематическая схема станка Поперечно-строгальный станок предназначен для строгания поверхностей. Станок имеет следующие основные узлы: станица 1, ползун 2 с резцовой головкой, стол 4 (Рис. 1). Привод состоит из зубчатой передачи 𝑧5, 𝑧6, планетарного редуктора 6 и электродвигателя 7 (Рис. 2а) Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движении в горизонтальном направлении. Для движения ползуна с резцовой головкой используется шестизвенный кривошипно- кулисный механизм с качающей 11 кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, шатуна 4 и ползуна 5. Диаграмма сил сопротивления движению ползуна 5 показана на Рис.
2б. Ход ползуна И выбирается в зависимости от длины 𝑙д, обрабатываемой поверхности с учетом перебегов 𝑙п, в начале и конце рабочего хода. Длина хода ползуна может изменяться при наладке станка для обработки конкретных деталей. Средняя скорость резания (скорость поступательного движения при рабочем ходе) выбирается в зависимости от условий обработки. Во время перебегов в конце холостого и в начале рабочего ходов осуществляется перемещение стола на величину подачи с помощью ходового винта. Поворот винта производится посредством храпового механизма, состоящего из колеса 10, рычага 11 с собачкой, тяги 9 и качающегося толкателя 8 (Рис. 2а). Поворот толкателя 8 осуществляется от дискового кулачка, который выполнен в виде паза в теле зубчатого колеса 2.
Регулирование подачи стола производится путем изменения длины рычага LМ, что позволяет изменять количество зубьев, захватываемых собачкой, и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектировании кулачкового механизма необходимо обеспечить заданный закон движения толкателя (Рис. 3) и осуществить подачу во время заднего перебега резца (в конце холостого и начале рабочего ходов) в соответствии с циклограммой, приведенной на Рис. 4. Рис. 3 Законы изменения ускорения толкателя кулачкового механизма Рис. 4 Циклограмма работы механизмов станка При проектировании и исследовании механизмов привода подачи станка считать известными параметры, приведенные в Таблице 1.
Исходные данные Таблица 1 Исходные данные Наименование параметраОбозначениеРазмерностьЧисловое значение 1. Максимальная длина хода ползуна Hм0,43 2. Длина перебега резца в долях от хода НLп м0,05Н 3. Число оборотов кривошипаn1 об/мин71 4. Число оборотов электродвигателяnэд об/мин1420 5. Коэффициент изменения скорости ползунаKv -1,40 6. Межосевое расстояние между опорами кривошипа и кулисыLoc м0,45 7. Сила резанияPmaxH1800 8. Сила трения между ползуном и направляющимиFH180 9. Вес ползунаG5H720 10. Вес кулисыG3 Н180 11. Момент инерции кулисы относительно оси, проходящей через её центр тяжести Is3 1,1 12. Момент инерции шатуна относительно оси, проходящей через её центр тяжестиIs4 0,04 13.
Отношение расстояния от точки С до центра тяжести кулисы к длине кулисыCS3/CD -0,5 14. Отношение длины шатуна к длине кулисыDE/CD -0,34 15. Отношение расстояния от точки D до центра тяжести шатуна к длине шатунаDS4/DE -0,354 16. Координата центра тяжести ползунаLs5 м0,18 17. Вылет резцаLp м0,10 Таблица 1 Продолжение 18. Коэффициент неравномерности вращения кривошипа - 19. Маховой момент ротора электродвигателяGDд^2 11,52 20. Маховой момент зубчатых механизмов, приведенный к валу электродвигателюGD^2 38,42 21. Угловая координата для силового расчётаф1 ⸰120 22. Максимальный подъём толкателяhм0,043 23. Длина толкателя Lbnм0,135 24. Максимально допустимый угол давления толкателяaдоп ⸰30 25.
Максимальное соотношение между величинами ускорений толкателяv=a1/a2 -3 26. Число зубьев колеса 5z5-13 27. Число зубьев колеса 6z6-18 28. Модуль зубчатых колёс 5,6mмм13 29. Число сателлитов в планетарном редуктореK-3 30. Параметры исходного контура реечного инструмента a0 xи xc⸰ - -20 1 0,25 Демо РПЗ Маткад Чертежи Ключевые слова: Поперечно-строгальный станок, качающаяся кулиса, кривошипно-ползунный механизм, закон движения звена приведения, кинематические передаточные функции, кинетостатический силовой расчёт, эвольвентная зубчатая передача, планетарный двухрядный редуктор, кулачковый механизм, качающийся толкатель. .
Файлы условия, демо
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов
 gg007361
gg007361

















