Курсовая работа 115: Проектирование и исследование механизмов ковочного манипулятора вариант Д
-50%
Описание
Проектирование и исследование механизмов ковочного манипулятора
Аннотация
Расчетно-пояснительная записка состоит из 37 страниц машинописного текста, 6 рисунков, 28 диаграмм и 1 таблицы.Расчетно-пояснительная записка содержит динамический расчет механической системы манипулятора. Расчет включает определение закона движения схвата манипулятора, силовой расчет основного механизма, расчет и исследование зубчатой передачи и планетарного механизма, расчет кулачкового механизма.
Оглавление
- 1.Техническое задание………………………………………………………3
- 2.Кинематический расчет механизмов манипулятора.....…...……………5
- 2.1.Кинематический расчет в естественных координатах..........................5
- 2.2.Переход в цилиндрические координаты.................................................8
- 2.2.1.Законы движения....................................................................................8
- 2.2.2.Построение графиков.............................................................................9
- 3.Силовой расчёт механизма……………………………………………….11
- 3.1.Исходные данные.....................................................................................11
- 3.2.Определение сил тяжести........................................................................12
- 3.3.Определение векторов центров масс......................................................12
- 3.4.Определение главных векторов и главных моментов сил инерции....12
- 3.5.Кинетостатический расчет механизма...................................................13
- 3.6.Построение графиков сил и моментов в кинематических парах........15
- 4. Проектирование зубчатой передачи……………………………………18
- 4.1. Геометрический расчёт эвольвентной зубчатой передачи внешнего зацепления………18
- 4. 2.Исполнительные размеры зубчатого колеса…………………………20
- 4. 3.Качественные показатели зубчатой передачи……………………….22
- 4. 4.Построение станочного зацепления и зубчатой передачи…………………..23
- 5.Проектирование планетарного механизма……………………………..27
- 5.1.Условия подбора чисел зубьев………………………………………..27
- 5.2.Подбор зубьев по методу сомножителей…………………………….28
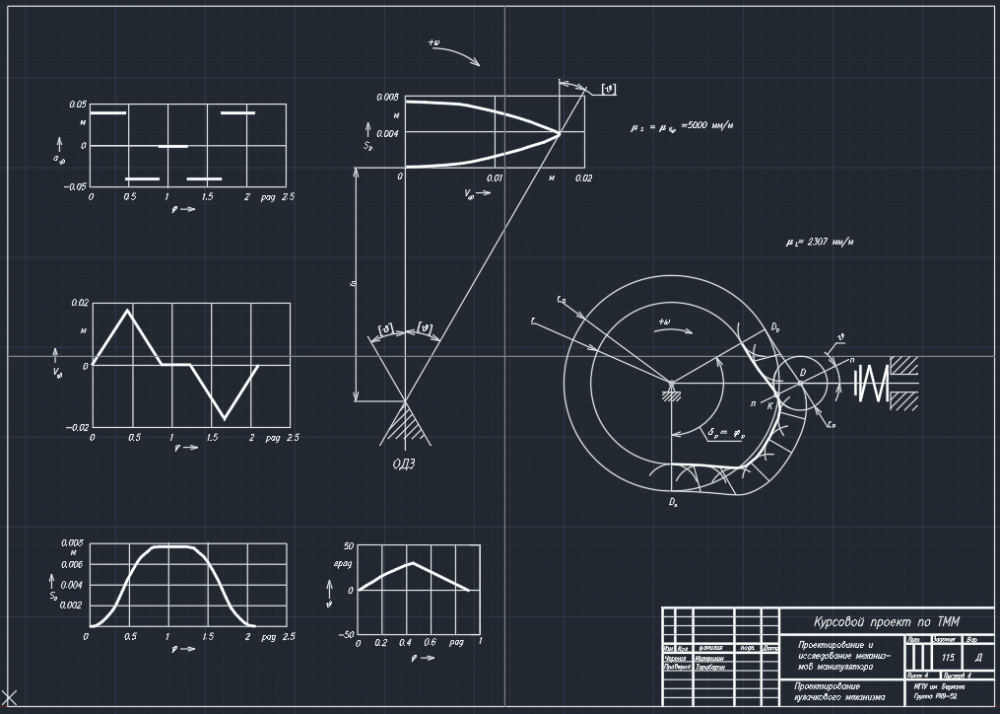
- 6.Проектирование кулачкового механизма………………………………31
- 6.1.Построение кинематических диаграмм движения толкателя………………..32
- 6.2.Определение основных размеров механизма………………………..36
- 6.3.Построение конструктивного профиля кулачка……………………..36
- 6.4.Построение диаграммы углов давления……………………………...36
- Заключение.………………………………………………………………...37
- Список литературы………………………………………………………...37
1. Техническое задание
Проектирование и исследование механизмов ковочного манипулятораМанипулятор предназначен для автоматизации технологических операций. Стол 1 манипулятора (см. рис.) получает вращение от Z3 , Z4 и зубчатую передачу с колесами Z5 , Z6 . Звено 2 относительно стола 1 перемещается вертикально, а рука 3 со схватом 4 относительно звена 2 – горизонтально.
При повороте стола 1 на угол j4=180° рука 3 выдвигается (при этом координата X1 центра схвата изменяется согласно рис. 115б), а двигатель 6 сначала включается для разгона, а затем переключается в режим торможения.Момент на валу двигателя при торможении в 2 раза больше, чем при разгоне.
Раскрытие схвата происходит после радиального выдвижения руки от кулачкового механизма, состоящего из кулачка 8 и толкателя 9 (рис 115в). Закон движения толкателя дан на рис. Толкатель 9 является ползуном коромысло-ползунного мезанизма схвата, в котором два коромысла 11 и 11* и два шатуна 10 и 10* (см. рис.). Для изменения угла y между коромыслами от 60° до 120° при раскрытии схвата ползун-толкатель 9 перемещается кулачка 8 на величину H.
![]() Исходные данные
Исходные данные ![]()
 Исходные данные
Исходные данные 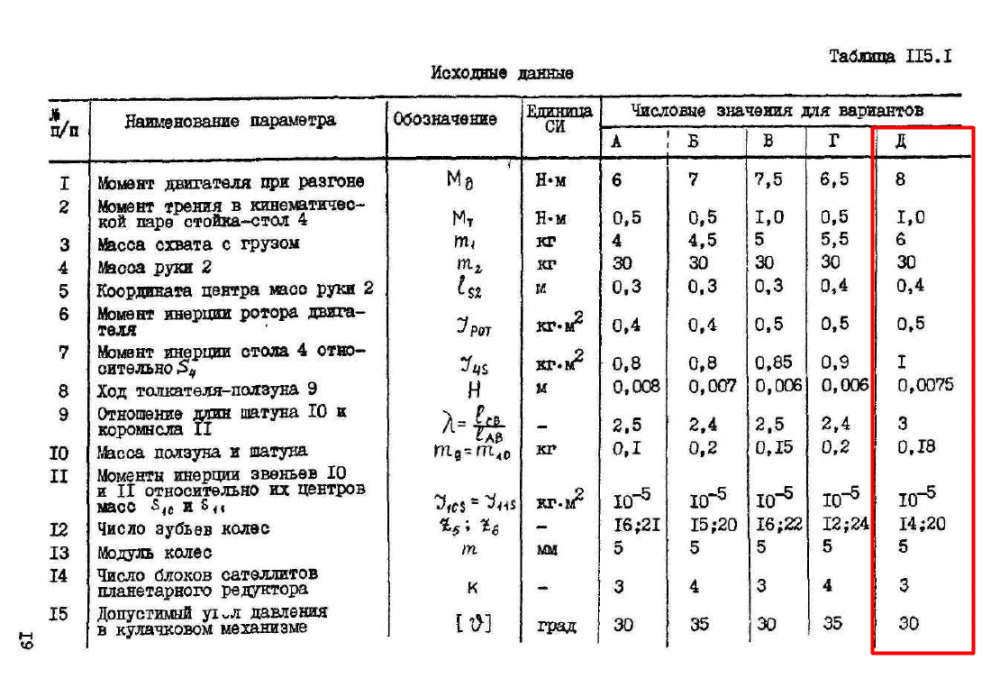
| №п/п | Наименование параметра | Числовое значение | Единица СИ |
| 1 | Момент трения в кинематичес-кой паре стойка-стол 1 | 1 | H*м |
| 2 | Масса схвата с грузом | 6 | кг |
| 3 | Масса руки 3 | 30 | кг |
| 4 | Координата центра масс руки 3 | 0,4 | М |
| 5 | Момент инерции стола 1 относительно S4 | 1 | Кг*м2 |
| 6 | Ход толкателя-ползуна 9 | 0,0075 | М |
| 7 | Число зубьев колёс | 14;20 | - |
| 8 | Модуль колёс | 5 | Мм |
| 9 | Число блоков сателлитов плане-тарного редуктора | 3 | - |
| 10 | Допустимый угол давления в кулачковом механизме | 30 | град |
Чертежи
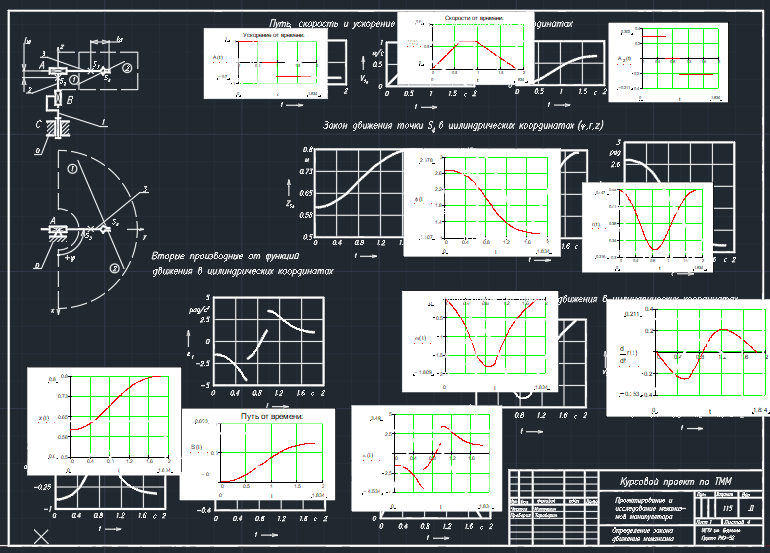
Лист 1 - Определение закона движения ![]()
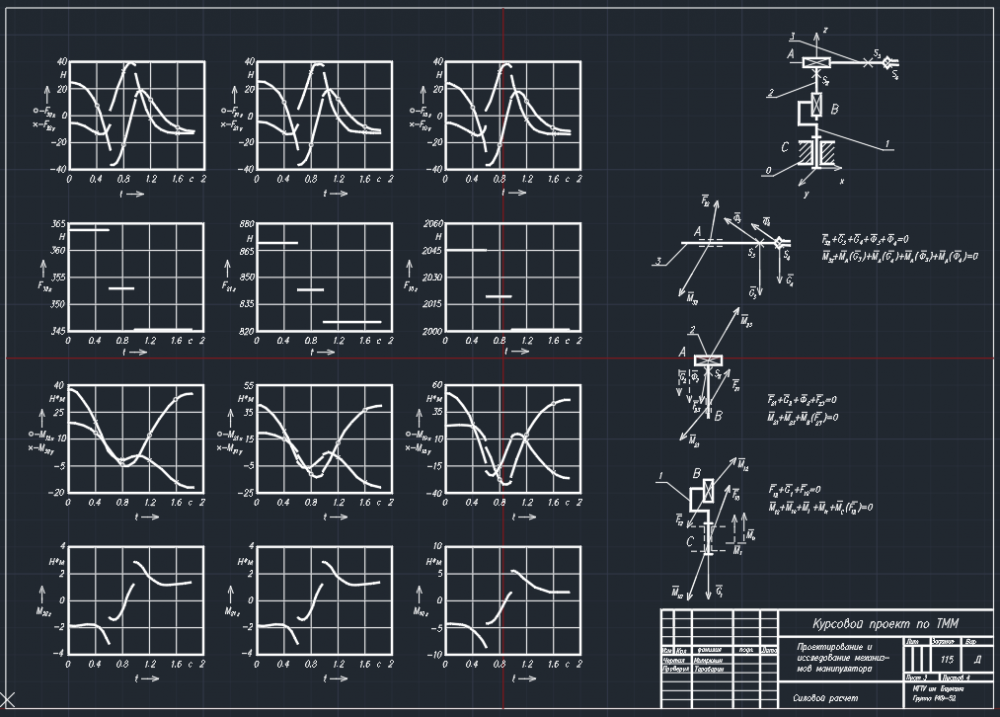
Лист 2 - Силовой расчет ![]()
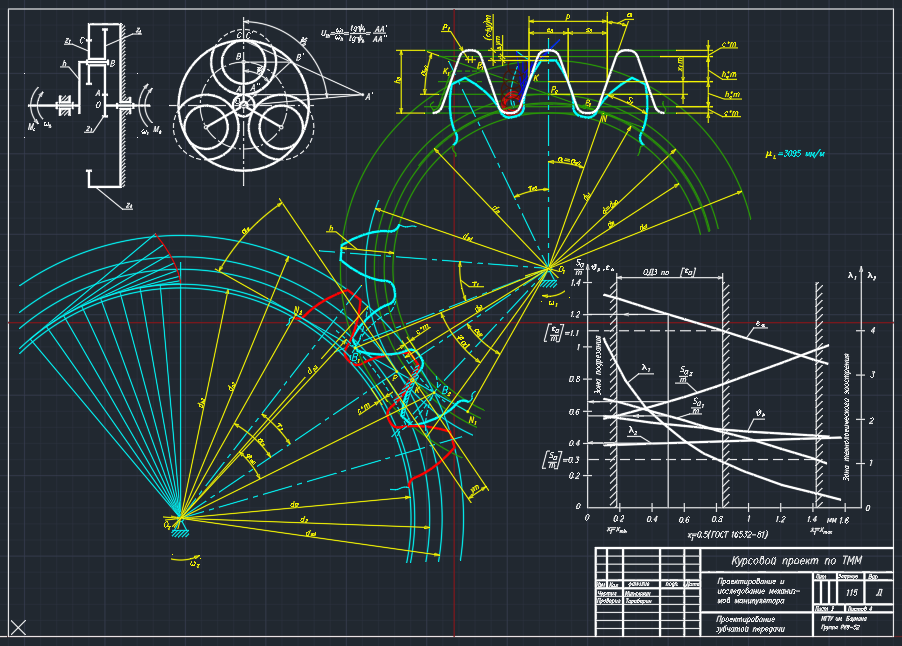
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
308
Качество
Идеальное компьютерное
Размер
3,44 Mb
Список файлов
Титульный лист. Реферат. Содержание. Техническое задание. Исходные данные.doc
РПЗ.xmcd
Заключение. Список литературы.doc
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:19
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
Проектирование и исследование механизмов четырехтактного двигателя внутреннего сгорания
Есть множество недочетов, пришлось много исправлять. Но очень помогло, что многие расчеты очень подробно расписаны.
Отзыв
Построение эпюр внутренних силовых факторов
Все сделано качественно. Особо удобно, что решение напечатано, а не написано от руки.

Отзыв
Расчет соединений
Очень здорово, всё понятно, даже человеку, пропустившему разбор этих тем. Подписаны страницы - источники по методичке. Суперски помогло в выполнении собственного варианта.
Отзыв
Исследование характеристик искусственного освещения
норма освещенности для ламп странная, по моей информации она должна быть одинаковая, так как устанавливается для человека, для сверки правильности своих мыслей пойдет, но есть нюансы

Отзыв
6 Задач
Полезно, жаль что купил когда уже половину сделал, времени бы сэкономилось


















