Курсовая работа 77: Проектирование и исследование механизмов рулевого гидропривода вариант В
-50%
Описание
Проектирование и исследование механизмов рулевого гидропривода
Содержание
- Реферат
- 1. Определение закона движения механизма
- 1.1. Постановка задача
- 1.2. Синтез основного механизма
- 1.2.1. Исходные данные
- 1.2.2. Определение размеров механизма
- 1.3. Определение параметров динамической модели
- 1.3.1. Расчет кинематических передаточных функций
- 1.3.2. Приведение сил
- 1.3.3. Приведение масс
- 1.4. Построение диаграммы суммарной работы
- 1.5. Построение диаграммы угловой скорости звена приведения в функции обобщенной координаты
- 1.6. Построение диаграммы времени и определения времени цикла
- 1.7. Построение диаграммы угловой скорости в функции времени
- 1.8. Построение диаграаммы углового ускорения звена приведения
- 2. Кинетостатический силовой расчет механизма
- 2.1. Постановка задача
- 2.2. Исходные данные
- 2.3.1. Построение плана скоростей
- 2.3.2. Построение плана ускорений
- 2.4. Определение главных векторов и главных моментов сил инерции
- 2.4.1. Главные векторы сил инерции
- 2.4.2. Главные моменты сил инерции
- 2.5. Кинетостатический силовой расчет механизма аналитическим методом
- 2.5.1. Уравнения силовой равновесия в проекциях на оси координат: звено 3
- 2.5.2. Уравнения силовой равновесия в проекциях на оси координат: звенья 2-3
- 2.5.3. Уравнения силовой равновесия в проекциях на оси координат: звено 1
- 2.5.4. Определение реакций в КП, момента сопротивления
- 2.5.5. Определение относительного расхождения
- 3. Проектирование цилиндрической эвольвентной зубчатой передачи и планетарного редуктора
- 3.1. Проектирование зубчатой передачи
- 3.1.1. Постановка задачи
- 3.1.2. Исходные данные
- 3.1.3. Геометрический расчет зацепления
- 3.1.3.1 Определение радиусов делительных окружностей
- 3.1.3.2. Определение радиусов основных окружностей
- 3.1.3.3. Определение минимальных значений коэффициентов смещения
- 3.1.3.4. Определение углов зацепления
- 3.1.3.5. Определение коэффициента воспринимаемого смещения
- 3.1.3.6. Определение коэффициента уравнительного смещения
- 3.1.3.7. Определение радиусов начальных окружностей
- 3.1.3.8. Определение межосевого расстояния
- 3.1.3.9. Определение радиусов окружностей вершин
- 3.1.3.10. Определение радиусов окружностей впадин
- 3.1.3.11. Определение высоты зубьев
- 3.1.3.12. Определение толщины зубьев под дугами делительных окружностей
- 3.1.3.13. Определение угла профиля на окружностях вершин зубьев колес
- 3.1.3.14. Определение толщины зубьев под дугами окружностей вершин
- 3.1.3.15. Определение размеров, необходимых для построения станочного зацепления
- 3.1.3.16. Определение качественных показателей зубчатой передачи
- 3.1.4. Выбор коэффициентов смещения
- 3.1.5. Результаты расчета зубчатой передачи
- 3.1.6. Построение схемы станочного зацепления и схемы эвольвентного зацепления
- 3.1.6.1. Определение радиуса граничных точек
- 3.1.6.2. Определение координат профиля зуба шестерни
- 3.1.6.3. Определение координат переходной кривой зуба шестерни
- 3.2. Проектирование планетарного редуктора
- 3.2.1. Постановка задача
- 3.2.2. Исходные данные
- 3.2.3. Подбор чисел зубьев
- 3.2.3.1. Условиесоосности
- 3.2.3.2. Условие сборки
- 3.2.3.3. Условие соседства
- 3.2.3.4. Условия работоспособности зубчатой передачи
- 3.2.3.5. Проверка обеспечения передаточного отношения с требуемой точностью
- 3.2.3.6. Построение схемы планетарного механизма
- 4. Проектирование кулачкового механизма
- 4.1. Постановка задача
- 4.2. Исходные данные
- 4.3. Определение предварительных параметров кулачка.
- 4.3.1. Построение диаграммы первой передаточной функции
- 4.3.2. Построение диаграммы функции положения
- 4.4. Определение размеры и эксцентриситета установка кулачка вала
- 4.5. Построение центрового и конструктивного профилей кулачка
- 4.6. Уточнение параметров расчитанного кулачка
- 4.6.1. Построение диаграммы функции положения
- 4.6.2. Построение диаграммы первой передаточной функции
- 4.6.3. Построение диаграммы второй передаточной функции
- 4.6.4. Построение диаграммы зависимости функции положения от первой передаточной функции
- 4.7. Построение диаграммы угла давления
- Заключение
- Литература
Техническое задание
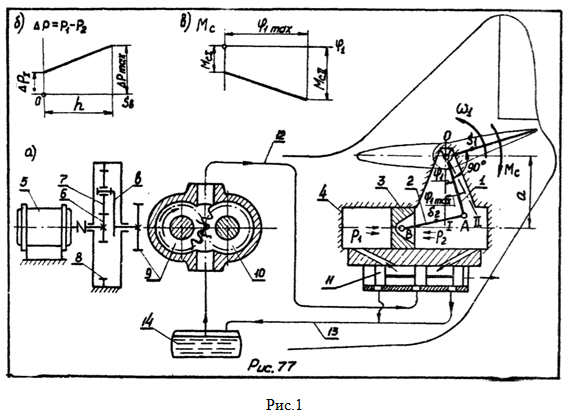
Гидравлический привод (рис. 1а) преобразует электрический сигнал управления в требуемое движения руля высоты летательного аппарата; он состоит из электродвигателя 5, планетарного редуктора 6-7-8-в, шестеренного насоса 9-10, гидродвигателя (гидроцилиндра) с рычажным (коромыслово-ползунным) механизмом 1-2-3-4 и золотникового устройства 11, регулирующего давление и расход жидкости в цилиндре 4.При перемещении (по сигналу управления) золотника 11 из среднего (нейтрального) положения вправо рабочая жидкость нагнетается насосом по напорной гидролинии 12 через открытое рабочее (дросселирующее) окно в левую полость цилиндра, а из правой полости по гидролинии 13 сливается в бак 14, откуда опять поступает в насос; поршень 3 перемещается вправо под действием перепада давлений рабочей жидкости в цилиндре. При движении управляющего золотника из среднего положения влево поршень 3 также перемещается влево.
График зависимости перепада давлений в гидроцилиндре от перемещений поршня (в пределах от 0 до максимальной величины ) дан на рис. 1б; величина начального перепада давлений должна быть определена по условию безударного останова механизма после поворота руля на заданный угол из положения Ⅰ в положение Ⅱ. Руль жёстко связан с выходным звеном 1 рычажного механизма; нагрузка на него задана в виде зависимости момента сопротивления от угла поворота на рис. 1в.
При проектировании и исследовании механизмов гидропривода считать известными параметры, приведённые в таблице 1.
В рулевом гидроприводе отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
Исходные данные
Таблица 1| Наименование параметра | Обозначение | Размерность | Числовые значения |
| Максимальный угол поворота звена 1 (рис. 77а) | | град | 25 |
| Ход поршня, соответствующий величине | h | м | 0,045 |
| Отношение длин звеньев | | - | 1,15 |
| Диаметр цилиндра 4 | d | м | 0,036 |
| Веса звеньев 1, 3 | G1 | кгс | 30 |
| G3 | кгс | 0,35 | |
| Вес единицы длины звена 2 | q | кгс/см | 0,08 |
| Расстояние от оси вращения О до центра масс S1 звена Ⅰ | lOS1 | м | 0,13 |
| Отношение расстояния от точки А до центра масс S2 шатуна к длине шатуна | | - | 0,5 |
| Момент инерции звена Ⅰ относительно оси, проходящей через его центр масс | | кгс·м·сек2 | 0,28 |
| Максимальный перепад давлений в цилиндре (в положении Ⅱ механизма) | | кгс/см2 | 120 |
| Момент сопротивления, приложенный к звену Ⅰ: в положении Ⅰ, в положении Ⅱ | МСⅠ МСⅡ | кгс·м кгс·м | 20 160 |
| Угловая координата звена Ⅰ для силового расчета механизма | ϕ1 | град | 20 |
| Числа зубьев колес 9, 10 | z9=z10 | - | 10 |
| Модуль зубчатых колес 9, 10 | m | мм | 4.5 |
| Число оборотов вала электродвигателя | nд | об/мин | 2800 |
| Число оборотов выходного вала редуктора | nв | об/мин | 700 |
| Число сателлитов редуктора | к | - | 3 |
| Параметры исходного производящего контура | | - | 1,0 |
| c* | - | 0,25 | |
| α | град | 20 |
- Момент инерции J2S звена 2 подсчитать по формуле J2S = , где m - масса звена, l - длина звена;
- При определении закона движения рычажного механизма угол разделить на интервалы .
Чертежи
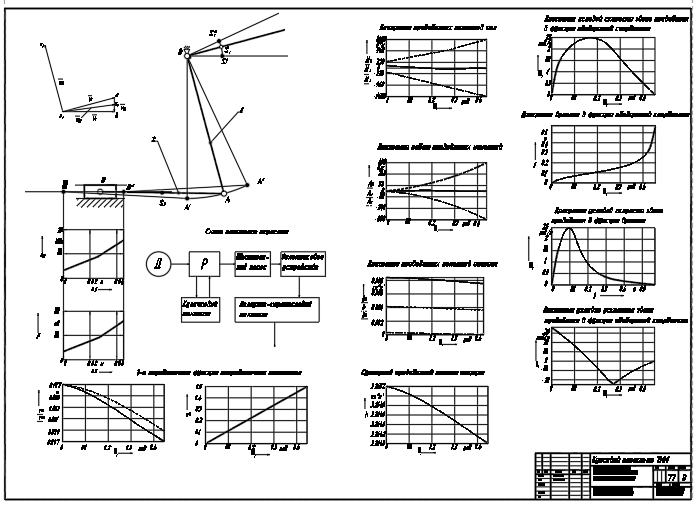
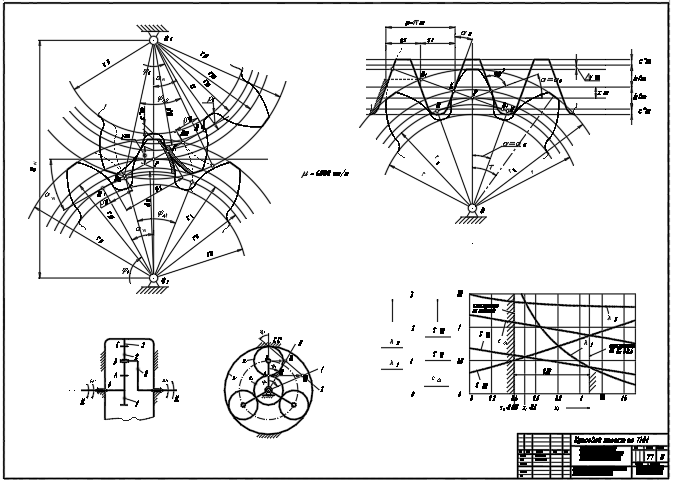
Лист 1 - Определение закона движения ![]()
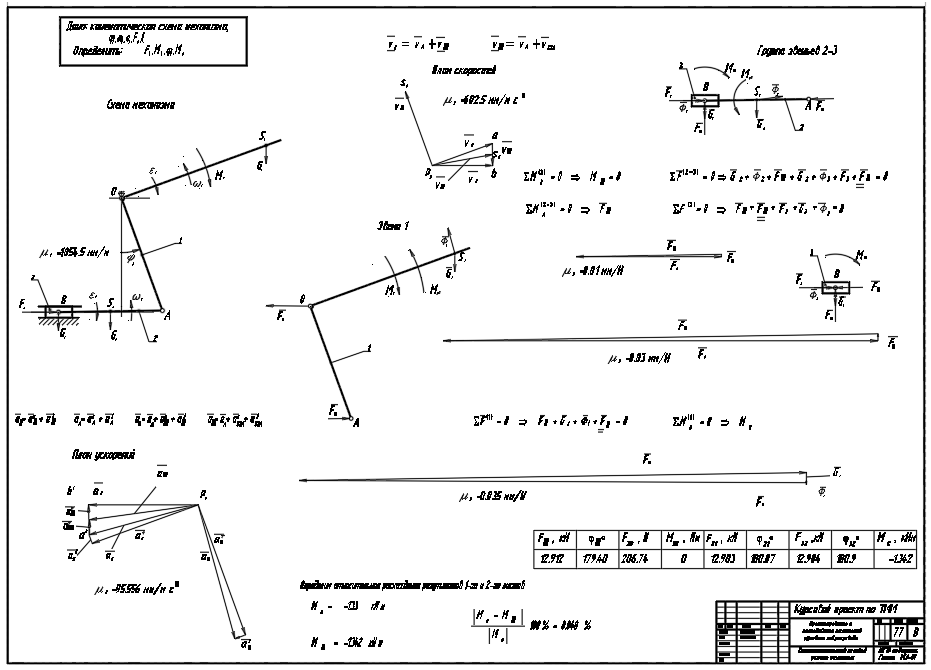
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()

Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
483
Качество
Идеальное компьютерное
Размер
4,24 Mb
Преподаватели

Список файлов
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg
РПЗ.xmcd
РПЗ.pdf

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:16
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!