Курсовая работа 75: Проектирование и исследование механизмов рулевой машины вариант А
-50%
Описание
Проектирование и исследование механизмов рулевой машины
Содержание
- Реферат …………………………………. ……………………………….……..…3
- Краткое описание механизмов рулевой машины…..………………….……. ....4
- Исходные данные……………………………………………………….……..…..6
- 1. Проектирование основного механизма рулевой машины и определение закона движения его начального звена...7
- 1.1 Проектирование кинематической схемы и определение длин звеньев механизма……7
- 1.2 Расчет кинематических передаточных функций скоростей……..……………..8
- 1.3 Построение графика суммарного приведенного момента………. ……………..9
- 1.4 Построение графика суммарной работы…………………….………………….11
- 1.5 Аналитический расчет суммарной работы………………... .…………………..11
- 1.6 Определение приведенного момента инерции звеньев………………………..12
- 1.7. Построение графика угловой скорости звена приведения в функции обобщенной координаты…….14
- 1.8 Построение графика времени в функции обобщенной координаты………….14
- 1.9 Построение графика углового ускорения звена приведения в функции обобщенной координаты..15
- 1.10 Построение индикаторной диаграммы……………..………………………...16
- 2. Силовой расчет механизма рулевой машины……..……………………………18
- 2.1 Исходные данные для силового расчета……………………..…………………18
- 2.2 Построение плана скоростей механизма ..……………………………………..18
- 2.3 Построение плана ускорений механизма……………………………………….19
- 2.4 Определение сил инерции…………………………………………..…..……….19
- 2.5 Определение главных моментов сил инерции…………………….………..….19
- 2.6 Определение реакций в кинематических парах………………….…….…..…..20
- 2.6.1 Группы звеньев 1 и 2………………………………………….………….…… 20
- 2.6.2 Звено 1………………………………………………………….………………..20
- 2.6.3 Звено 2………………………………………………………….…….….………21
- 2.6.4 Звено 3………………………………………………………….…….….………21
- 2.7 Определение неизвестной внешней силы…………………….…..…….……….22
- 2.8 Расчет погрешности в определении движущей силы …….………….………...22
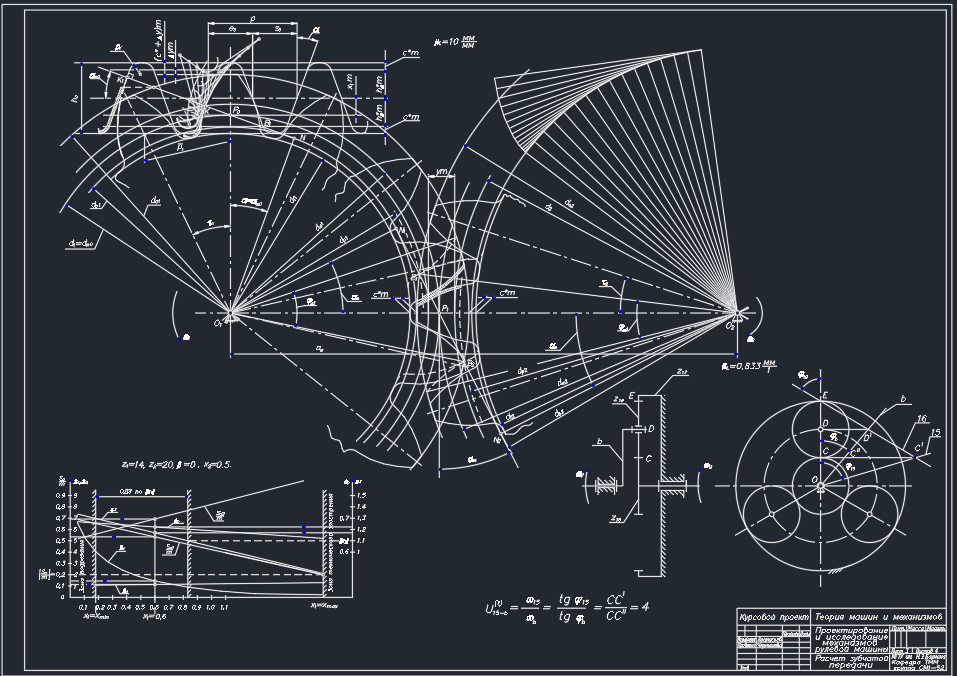
- 3. Проектирование зубчатых механизмов..…………………………………………23
- 3.1 Исходные данные для проектировани…………………………………………..23
- 3.2 Геометрический расчет эвольвентной зубчатой передачи…..………….….…23
- 3.3 Выбор коэффициента смещения по качественным показателям………..……24
- 3.4 Результаты расчета зубчатой передачи…………………………………………26
- 3.5 Построение станочного и зубчатого зацеплений ……………………………...27
- 3.6 Проектирование планетарного редуктора……………..………………….……27
- 3.6.1 Исходные данные………………………………………………………………27
- 3.6.2 Расчет числа зубьев колес…………………………………………………..…27
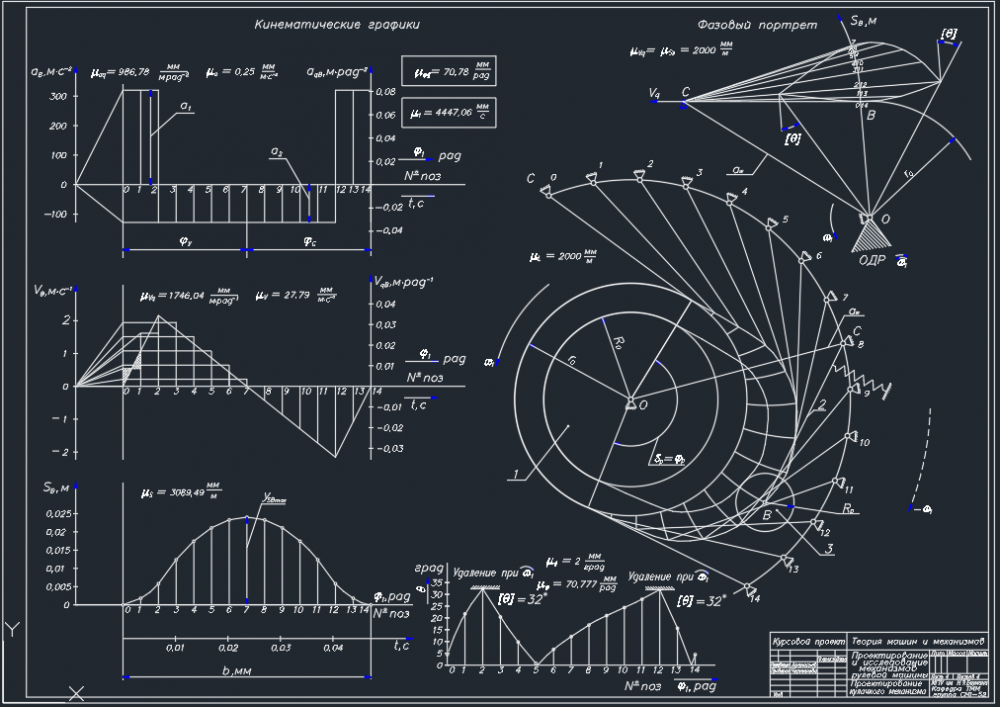
- 4. Проектирование кулачкового механизма…………….…………………………..29
- 4.1 Построение кинематических диаграмм движения кулачка и расчет масштабов построения..29
- 4.2 Определение основных размеров механизма…………..……………………....30
- 4.3 Построение центрового и конструктивного профилей кулачка…………..…..30
- 4.4 Построение графика угла давления ……………………………..…………..….31
- Заключение……………………………………………………………..…………….32
- Список используемой литературы……………………………………..…………...33
Реферат
Расчетно-пояснительная записка к курсовому проекту “Проектирование и исследование механизмов рулевой машины” содержит 28 листов машинописного текста, рисунков, таблиц. В состав курсового проекта входят: данная расчетно-пояснительная записка и 4 листа формата А1 с необходимыми графическими расчетами и зависимостями.В расчетно-пояснительной записке проведено проектирование механизма рулевой машины, исследовано его движение и определены управляющие силовые воздействия, проведено проектирование эвольвентной цилиндрической зубчатой передачи, проектирование однорядного планетарного редуктора и проектирование кулачкового механизма.
Краткое описание механизмов рулевой машины
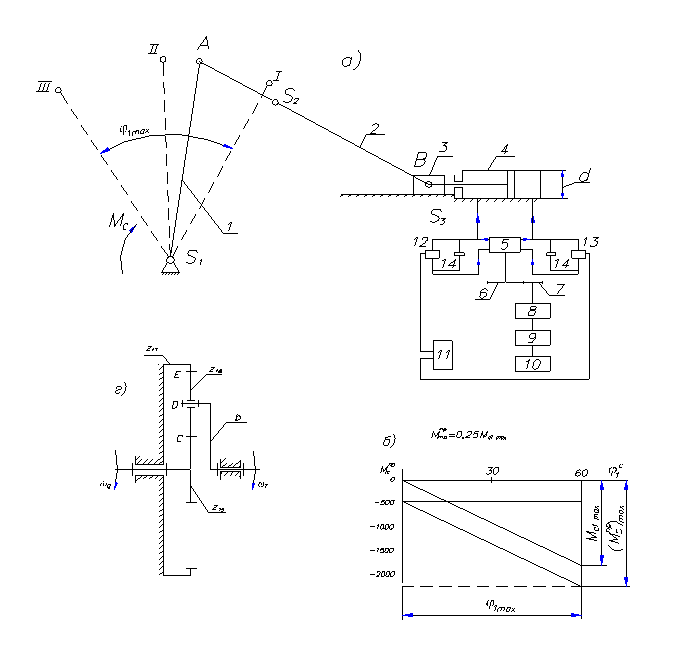
Рулевая машина (рис.1a) предназначена для поворота руля летательного аппарата с целью изменения траектории его полета. Основным механизмом является коромыслово-ползунный механизм ОАВ, на валу О которого закреплен руль летательного аппарата. Поворот руля (вместе со звеном 1) осуществляется с помощью шатуна 2 ведущим звеном 3, с которым жестко связан поршень, перемещающийся в цилиндре 4.Подача масла в левую и правую полости цилиндра 4 производится шестереноч-
ным насосом 5.
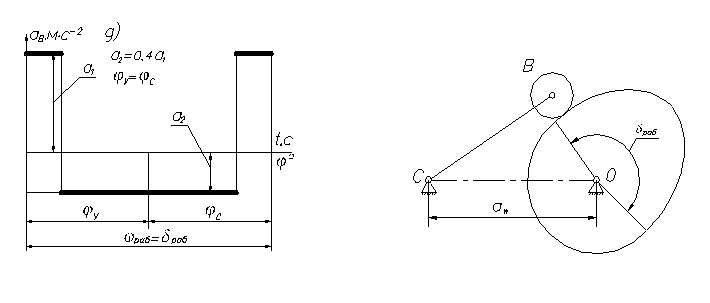
Вращение шестерни насоса передается от электродвигателя 9 через планетарный редуктор 8(схема редуктора на рис.1г) и пару зубчатых колес 7 и 6. Вал электро-
двигателя 9 приводится во вращение от специального источника питания 10.
Регулирование подачи масла в каждую из рабочих полостей цилиндра производится с помощью автомата управления 11, воздействующего на клапаны 12 и 13: при необходимости изменения траектории полета аппарата автомат управления 11 подает сигнал, и соответствующий клапан(12 или 13) открывается, давая возможность части масла поступать обратно в насос; при этом давление масла в соответствующей полости цилиндра уменьшается.
Предохранительные клапаны14 служат для сброса избыточного количества масла обратно в насос в случае, если давление в цилиндре 4 превысит расчетное. При повороте руля летательного аппарата (звено 1) на угол из одного крайнего положения (I) в другое (III) (рис.1а) на звено 1 действует момент сопротивления , зависимость которого от угла представлена графиком (,) (рис.1б).
В механизмах управления рулевой машины отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию (рис.1д). На (рис.1д) приведен график изменения ускорения толкателя от угла поворота кулачка.
Исходные данные
Таблица 1| Наименование параметра | Обозна- чение | Размер- ность | Число-вые знатче-ния | Размер-ность СИ | Число-вые значе- ния СИ |
| Линейные координаты точки В ползуна 3 | SB I SB II SB III | м м м | 0,344 0,224 0,134 | м м м | 0,344 0,224 0,1341 |
| Углы поворота ведомого коромысла 1 по отношению к его начальному (I) положению | j II - j I j III - j II | град град | 30 60 | рад рад | 0,5236 1,0472 |
| Эксцентриситет | м | 0,08 | м | 0,08 | |
| Отношение расстояния от точки А до центра масс S2 шатуна к длине шатуна | | - | 0,33 | - | 0,33 |
| Веса звеньев: коромысла 1 шатуна 2 ползуна 3 | G1 G2 G3 | кгс кгс кгс | 12 2,7 3,6 | Н Н Н | 120 27 36 |
| Моменты инерции звеньев относительно осей, проходящих через их центры масс: звена 1 звена 2 | J1S J2S | кг×м×с2 кг×м×с2 | 0,058 0,0052 | кг×м2 кг×м2 | 0,58 0,052 |
| Диаметр цилиндра | d | м | 0,036 | м | 0,036 |
| Максимальная величина момента сопротивления, приложенного к звену 1 | Мс1 max | кгc×м | 180 | Н×м | 1800 |
| Угловая координата звена 1 для силового расчета (рис.75д) | град | рад | | ||
| Числа зубьев колес 6 и 7 | z6 z7 | - - | 20 14 | ||
| Модуль зубчатых колес 6 и 7 | m | мм | 2,5 | - | - |
| Передаточное отношение планетарного редуктора | | - | 4 | - | 4 |
| Число сателлитов в планетарном редукторе | K | - | 3 | - | 3 |
| Параметры исходного производящего контура | | град - - | 20 1 0,25 | ||
| Число оборотов кулачка | n | об/мин | 600 | об/с | 10 |
| Угол рабочего профиля кулачка | | град | 170 | рад | 2,9671 |
| Перемещение толкателя (перемещение точки В). | h | м | 0,024 | м | 0,024 |
| Длина рычага толкателя | | м | 0,075 | м | 0,075 |
| Максимально допустимый угол давления в кулачковом механизме | | град | 32 | рад | 0,5585 |
Чертежи
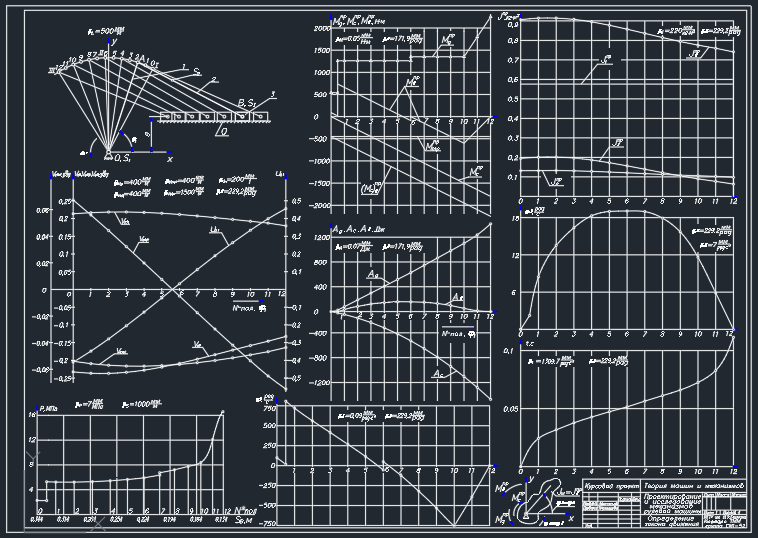
Лист 1 - Определение закона движения ![]()
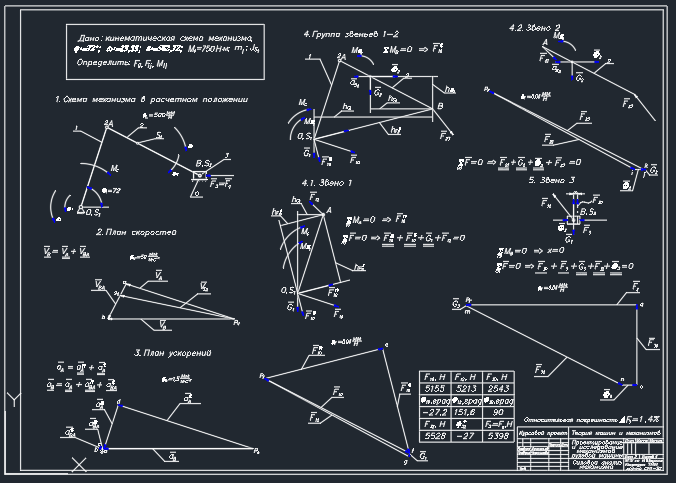
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
697
Качество
Идеальное компьютерное
Размер
2,62 Mb
Преподаватели
Список файлов
Вариант 1
Лист1.dwg
Лист2.dwg
Лист3.dwg
Лист4.dwg
Определение размеров.mcd
РПЗ.DOC
Вариант 2
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg
РПЗ.DOC
Вам все понравилось? Получите кэшбэк - 40 рублей на Ваш счёт при покупке. Поставьте оценку и напишите положительный комментарий к купленному файлу. После Вы получите деньги на ваш счет.
 polosatik
polosatik
18 ноября 2015 в 18:14
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















