Статья: Высокоточный привод линейного перемещения
Описание
Предлагается разработать конструкцию силового привода линейного перемещения высокой точности позиционирования (рис. 1) с применением шагового двигателя и роликовинтовой передачи на выходном звене. Механизмы линейных перемещений широко используются в робототехнике, оптико-механических и авиационных приборах. Линейные актуаторы представляют собой механизмы, преобразующие электрическую энергию во вращательное движение с помощью электродвигателя, и затем в поступательное движение с помощью винтового механизма. Использование в качестве винтового механизма роликовинтовой передачи позволит существенно сократить габариты.
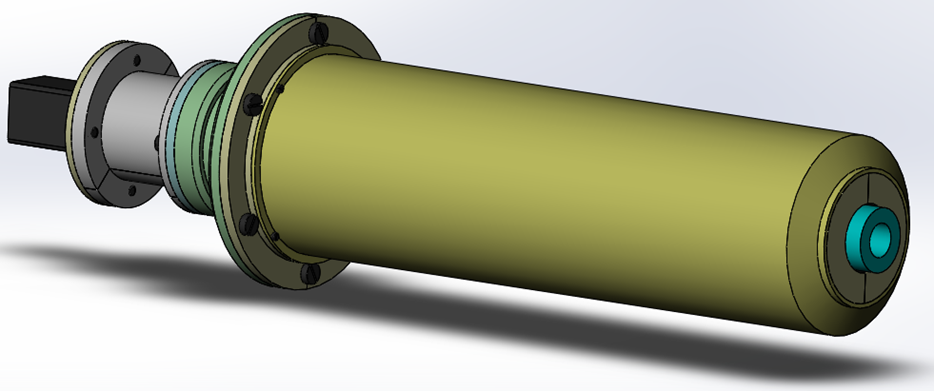
Рис. 1. Привод линейного перемещения
В качестве электродвигателя используется шаговый двигатель. Данные типы двигателей уже давно и успешно применяются в самых разнообразных устройствах.
Шаговый двигатель имеет целый ряд преимуществ по сравнению с другими синхронными электромашинами:
- угол поворота ротора определяется числом импульсов, которые поданы на двигатель;
- двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны);
- прецизионное позиционирование и повторяемость;
- возможность быстрого старта/остановки/реверсирования;
- высокая надежность, связанная с отсутствием щеток;
- однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи;
- возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора, что в свою очередь снижает массогабаритные характеристики привода, уменьшает количество звеньев кинематической цепи и снижает себестоимость конечного изделия.
Однако, шаговым двигателям свойственен нежелательный эффект, называемый резонансом. Эффект проявляется в виде внезапного падения момента на некоторых скоростях. Это может привести к пропуску шагов и потере синхронности. Эффект проявляется в том случае, если частота шагов совпадает с собственной резонансной частотой системы ротор двигателя - нагрузка.
Существуют методы борьбы с резонансом на уровне алгоритма работы драйвера. Если резонансная частота точно известна, то ее можно проходить, меняя режим работы. Однако самой эффективной мерой для борьбы с резонансом является применение микрошагового режима. В микрошаговом режиме с шагом 1/32 от основного при каждом микрошаге сообщается всего около 0.1% от энергии полного шага. Поэтому в микрошаговом режиме явление резонанса практически незаметно.
Характеристики статьи
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

 drawing
drawing


















