НИР: НИРС на тему:"Исследование автоколебаний в нелинейных системах" вариант 27
Описание
Термин «Автоколебания» был введен еще в 1928 году Андроновым А.А .В его основополагающей работе была описана теория нелинейных колебаний в системах с одной степенью свободы.
Режим автоколебаний является в большинстве случаев основным режимом работы в нелинейных системах. К такому классу систем чаще всего относятся системы, содержащие в цепи обратной связи (регуляторе) различные позиционные звенья, которые характеризуются простой реализацией на аппаратном уровне, высокой надежностью в работе и невысокой стоимостью. В первую очередь к ним относятся двух- и трехпозиционные датчики (реле температуры, давления, уровня, расхода и др.) различных типов и модификаций, которые широко используются в промышленности для организации автоматического регулирования. Отличительной особенностью всех таких звеньев является то, что они характеризуются однозначной нечетной характеристикой (например, двух- и трехпозиционные реле как идеальные, так и имеющие зоны нечувствительности, звенья с “насыщением” и с зоной нечувствительности и др.)
Аннотация.
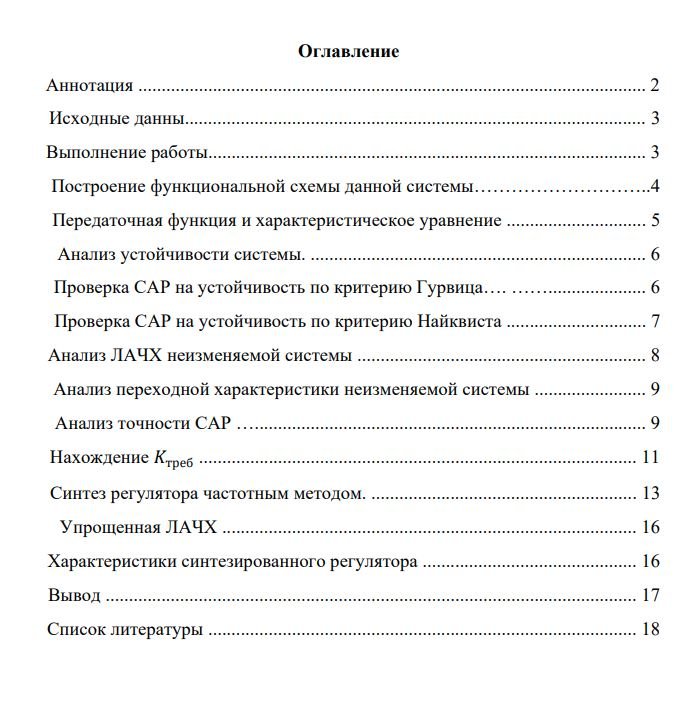
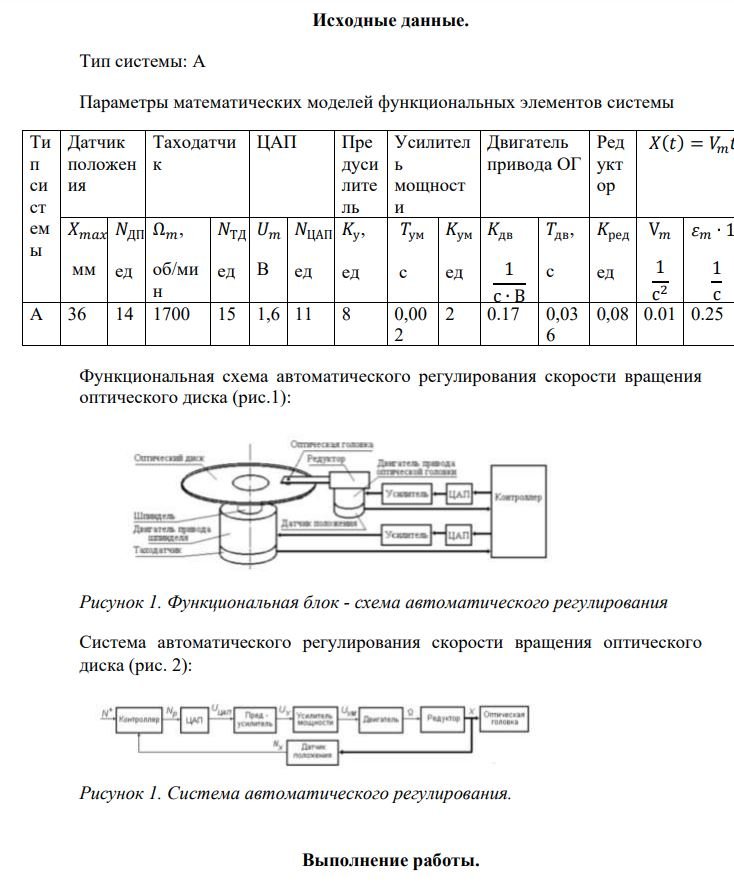
Первая часть выполнения научно – исследовательской работы основывается на динамическом расчете контура управления и стабилизации угловой скорости шпинделя оптического диска контура автоматического позиционирования ОГ. В ходе выполнения данного анализа необходимо сформировать функциональную блок-схему системы автоматического регулирования позиционирования оптической головки , и, пренебрегая нелинейностями характеристик функциональных элементов системы и дискретным характером процессов в отдельных точках системы, сформировать линейные модели элементов ее неизменяемой части и вычислить числовые значения параметров этих модулей с учетом требуемых условий. Также необходимо определить передаточные функции элементов системы и составить структурную схему системы с учетом управляющего воздействия. Исходную структурную схему преобразуем к эквивалентной с единичной обратной связью методом структурных преобразований. Определим передаточные функции разомкнутой, замкнутой системы и передаточную функцию ошибки по управляющему воздействию. По полученным передаточным функциям необходимо построить дифференциальные уравнения системы и получить выражения характеристических полиномов для системы в разомкнутом и замкнутом состояниях. Проанализировать также устойчивость неизменяемой системы, используя алгебраический критерий Гурвица и частотный критерий Найквиста. Также определим показатели динамического качества и статической точности по реакциям системы на тестовые ступенчатое и линейно возрастающее входное воздействие
![]()
![]()
![]()
![]()
Режим автоколебаний является в большинстве случаев основным режимом работы в нелинейных системах. К такому классу систем чаще всего относятся системы, содержащие в цепи обратной связи (регуляторе) различные позиционные звенья, которые характеризуются простой реализацией на аппаратном уровне, высокой надежностью в работе и невысокой стоимостью. В первую очередь к ним относятся двух- и трехпозиционные датчики (реле температуры, давления, уровня, расхода и др.) различных типов и модификаций, которые широко используются в промышленности для организации автоматического регулирования. Отличительной особенностью всех таких звеньев является то, что они характеризуются однозначной нечетной характеристикой (например, двух- и трехпозиционные реле как идеальные, так и имеющие зоны нечувствительности, звенья с “насыщением” и с зоной нечувствительности и др.)
Аннотация.
Первая часть выполнения научно – исследовательской работы основывается на динамическом расчете контура управления и стабилизации угловой скорости шпинделя оптического диска контура автоматического позиционирования ОГ. В ходе выполнения данного анализа необходимо сформировать функциональную блок-схему системы автоматического регулирования позиционирования оптической головки , и, пренебрегая нелинейностями характеристик функциональных элементов системы и дискретным характером процессов в отдельных точках системы, сформировать линейные модели элементов ее неизменяемой части и вычислить числовые значения параметров этих модулей с учетом требуемых условий. Также необходимо определить передаточные функции элементов системы и составить структурную схему системы с учетом управляющего воздействия. Исходную структурную схему преобразуем к эквивалентной с единичной обратной связью методом структурных преобразований. Определим передаточные функции разомкнутой, замкнутой системы и передаточную функцию ошибки по управляющему воздействию. По полученным передаточным функциям необходимо построить дифференциальные уравнения системы и получить выражения характеристических полиномов для системы в разомкнутом и замкнутом состояниях. Проанализировать также устойчивость неизменяемой системы, используя алгебраический критерий Гурвица и частотный критерий Найквиста. Также определим показатели динамического качества и статической точности по реакциям системы на тестовые ступенчатое и линейно возрастающее входное воздействие


Файлы условия, демо
Характеристики НИР
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаВариант
Просмотров
28
Размер
1,69 Mb
Список файлов
Исследование автоколебаний в нелинейных системах.pdf

Друзья, спасибо за доверие! Если вам понравилась работа – поставьте 5⭐ и напишите отзыв. Это поможет другим студентам, а мне даст силы делать ещё больше качественных материалов для вас 🔥
 anhyeuem
anhyeuem
17 марта 2021 в 14:02
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















