Курсовая работа: Переориентация КЛА по векторному критерию минимального расхода и быстродействия (моменты инерции 150, 100, 200)
Описание
Переориентация КЛА по векторному критерию минимального расхода и быстродействия (моменты инерции 150, 100, 200)
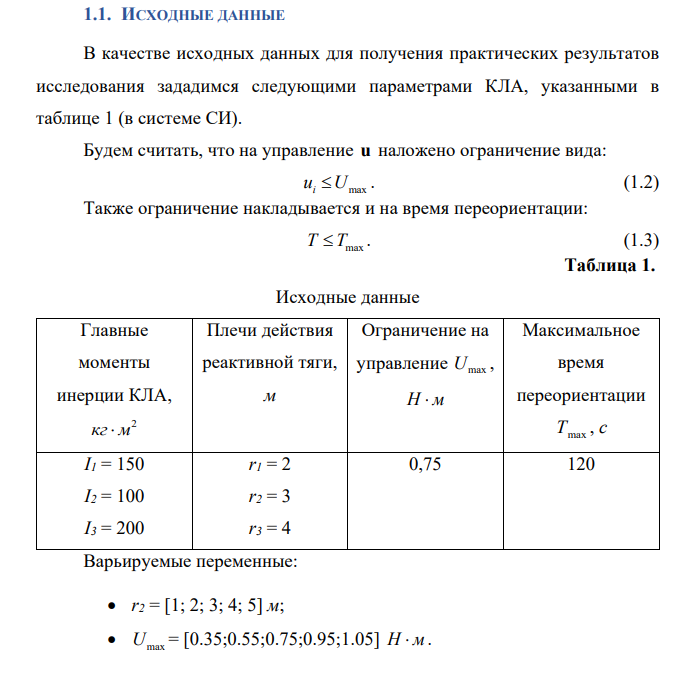
В настоящее время актуальным является вопрос исследования модели системы с несколькими критериями и, как следствие, необходимость поиска решения, максимально приближенного к идеальному, так как в любой многокритериальной системе существует противоречие: улучшение параметров системы приводит к улучшению лишь части критериев, другая часть, как правило, ухудшается, что делает идеальную точку недостижимой. В данной работе необходимо рассмотреть задачу переориентации космического летательного аппарата (КЛА), обеспечивающую оптимизацию управления по вектору критериев: быстродействию и минимальному суммарному вектору тяги. Для решения задачи требуется составить нелинейную высокоразмерную динамическую модель; выбрать структуру управления, позволяющую достичь максимальной эффективности по обоим критериям; определить (идеальную) утопическую точку и используя метод многокритериальной оптимизации на основе утопической точки, найти компромиссное решение.
![]()
![]()
В настоящее время актуальным является вопрос исследования модели системы с несколькими критериями и, как следствие, необходимость поиска решения, максимально приближенного к идеальному, так как в любой многокритериальной системе существует противоречие: улучшение параметров системы приводит к улучшению лишь части критериев, другая часть, как правило, ухудшается, что делает идеальную точку недостижимой. В данной работе необходимо рассмотреть задачу переориентации космического летательного аппарата (КЛА), обеспечивающую оптимизацию управления по вектору критериев: быстродействию и минимальному суммарному вектору тяги. Для решения задачи требуется составить нелинейную высокоразмерную динамическую модель; выбрать структуру управления, позволяющую достичь максимальной эффективности по обоим критериям; определить (идеальную) утопическую точку и используя метод многокритериальной оптимизации на основе утопической точки, найти компромиссное решение.
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
7
Размер
3,21 Mb
Список файлов
52596dУляшов А.С. ОУММС АК4-81.pdf
22 апреля 2021 в 19:50
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















