Курсовая работа: Разработать структурно-конструктивную схему производственной установки
Описание
Задание к курсовому проектированию по курсу ЭМС. Вариант 7.
Разработать:
- структурно-конструктивную схему производственной установки;
- электрические принципиальные схемы управления ЭП;
- логическую программу управления ЭП круглопильного (восьмипильного) станка с учётом выполнения функциональных возможностей и состава силовой части электрооборудования.
Произвести расчёт и выбор электроприводов и электрооборудования в соответствии с требованиями, по нижеприведённым исходным данным.
Состав силовой части электрооборудования агрегата:
М1 – двигатель механизма резания, 3х-фазный, асинхронный, с к.з.р., нереверсивный;
М2 – двигатель привода цепного конвейера подачи бруса, 3х-фазный, асинхронный с к.з.р., реверсивный;
М3 – двигатель ленточного конвейера удаления отходов пиления, нереверсивный, 3х-фазный, асинхронный с к.з.р.;
М4 – двигатель привода ленточного конвейера удаления досок, нереверсивный, 3х-фазный, асинхронный с к.з.р.;
М5 – электрогидротолкатель (ЭГТ) тормоза механизма резания, 3х-фазный, асинхронный с к.з.р., нереверсивный.
Функциональные возможности электрической принципиальной схемы управления и логической программы управления LOGO!:
1. дистанционное управление всеми электроприводами;
2. наличие ключа управления выбора режима работы электроприводов;
3. режимы работы: I – наладка; II – работа;
4. при выборе режима работы I – возможность раздельной работы приводов;
5. при выборе режима работы II – возможность зависимой (сблокированной) работы приводов;
6. при работе в режиме II – невозможность включения М2 при неработающем М1, невозможность включения М1 при неработающих М3 и М4;
7. наличие одной ступени автоматического ограничения пускового тока за счёт включения пусковых сопротивлений в цепи статора во время пуска привода М1;
8. шунтирование пусковых сопротивлений в статорной цепи М1 в функции тока;
9. наличие комбинированного двухступенчатого способа торможения привода М1: первая ступень – динамическое торможение в функции времени, вторая ступень – механическое торможение;
10. включение М1 только при разблокированном механическом тормозе (включенном М5) при любом режиме работы;
11. работа всех приводов в режиме S1;
12. возможность включения обратного хода привода подачи бруса (М2) в «толчковом» режиме в любом режиме работы;
13. наличие кнопки общего останова всех электроприводов;
14. невозможность включения и автоматический останов в процессе работы, привода М1 при нарушении целостности двухстороннего охранного ограждения;
15. невозможность включения и автоматический останов в процессе работы, привода М2 при нарушении целостности одностороннего охранного ограждения;
16. максимально-токовая защита электропривода М1 при помощи токовых реле;
17. защита от перегрузки электропривода М1 при помощи тепловых реле;
18. наличие контрольной световой сигнализации включенного состояния электроприводов и наличие напряжения в схеме управления;
19. наличие электрических видов защит электроприводов М2, М3, М4, М5 с учётом режима работы электропривода и рекомендаций по обеспечению безопасных условий работы персонала.
Исходные данные для расчёта мощности электродвигателей производственной установки:
Привод цепного конвейера подачи бруса: подача конвейера = 1 – 25 м3/ч: 2 – 15 м3/ч: 3 – 20 м3/ч; длина конвейера = 1 – 20 м: 2 – 15 м: 3 – 25 м; конвейер со скользящими цепями.
Привод ленточного конвейера удаления досок: мощность электродвигателей данных механизмов определяется по нагрузочным диаграммам электроприводов, выданных преподавателем, осуществляющим руководство курсовым проектированием.
Привод механизма резания: диаметр пилы = 1 – 630 мм: 2 – 500 мм: 3 – 710 мм; скорость подачи бруса = 1 – 0,1 м/с: 2 – 0,2 м/с: 3 – 0,15 м/с; параметры бруса = 1 – 6000х200х200 мм: 2 – 6000х150х150 мм: 3 – 4000х200х150 мм.
Привод ленточного конвейера удаления отходов пиления: мощность электродвигателя данного механизма определяется по нагрузочной диаграмме электропривода, выданной преподавателем, осуществляющим руководство курсовым проектированием.
Привод электрогидравлического толкателя тормоза механизма резания: требуемое усилие на расжатие колодок тормоза = 1 – 600 Н: 2 – 2000 Н: 3 – 1600 Н.
![]()
![]()
СОДЕРЖАНИЕ
ВВЕДЕНИЕ…………...……………………………………………………….……..…8
1 РАСЧЁТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПО НАГРУЗОЧНОЙ ДИАГРАММЕ МЕТОДОМ ЭКВИВАЛЕНТНОГО ТОКА (МОЩНОСТИ, МОМЕНТА)……………………….………………………………………………...….9
1.1Определение режима работы электропривода по нагрузочной диаграмме……………………………………………………………………….…..…..9
1.2 Расчёт эквивалентного тока (мощности, момента)………………..…………..9
4 РАСЧЁТ И ОБОСНОВАНИЕ ВЫБОРА АППАРАТУРЫ ……..………….……..22
4.1 Расчёт и обоснование выбора аппаратуры управления электрическими цепями ………………………………………………………………………….……...22
4.2 Расчет и обоснование выбора аппаратуры сигнализации……………...……25
4.3 Расчёт и обоснование выбора аппаратуры защиты……………………….….25
4.4 Расчёт и обоснование выбора аппаратуры контроля параметров…………..29
4.5 Расчёт и обоснование выбора проводов и кабелей…………………………..29
ЗАКЛЮЧЕНИЕ………………………………………………………….…………….31
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ……………………..…………..32
Разработать:
- структурно-конструктивную схему производственной установки;
- электрические принципиальные схемы управления ЭП;
- логическую программу управления ЭП круглопильного (восьмипильного) станка с учётом выполнения функциональных возможностей и состава силовой части электрооборудования.
Произвести расчёт и выбор электроприводов и электрооборудования в соответствии с требованиями, по нижеприведённым исходным данным.
Состав силовой части электрооборудования агрегата:
М1 – двигатель механизма резания, 3х-фазный, асинхронный, с к.з.р., нереверсивный;
М2 – двигатель привода цепного конвейера подачи бруса, 3х-фазный, асинхронный с к.з.р., реверсивный;
М3 – двигатель ленточного конвейера удаления отходов пиления, нереверсивный, 3х-фазный, асинхронный с к.з.р.;
М4 – двигатель привода ленточного конвейера удаления досок, нереверсивный, 3х-фазный, асинхронный с к.з.р.;
М5 – электрогидротолкатель (ЭГТ) тормоза механизма резания, 3х-фазный, асинхронный с к.з.р., нереверсивный.
Функциональные возможности электрической принципиальной схемы управления и логической программы управления LOGO!:
1. дистанционное управление всеми электроприводами;
2. наличие ключа управления выбора режима работы электроприводов;
3. режимы работы: I – наладка; II – работа;
4. при выборе режима работы I – возможность раздельной работы приводов;
5. при выборе режима работы II – возможность зависимой (сблокированной) работы приводов;
6. при работе в режиме II – невозможность включения М2 при неработающем М1, невозможность включения М1 при неработающих М3 и М4;
7. наличие одной ступени автоматического ограничения пускового тока за счёт включения пусковых сопротивлений в цепи статора во время пуска привода М1;
8. шунтирование пусковых сопротивлений в статорной цепи М1 в функции тока;
9. наличие комбинированного двухступенчатого способа торможения привода М1: первая ступень – динамическое торможение в функции времени, вторая ступень – механическое торможение;
10. включение М1 только при разблокированном механическом тормозе (включенном М5) при любом режиме работы;
11. работа всех приводов в режиме S1;
12. возможность включения обратного хода привода подачи бруса (М2) в «толчковом» режиме в любом режиме работы;
13. наличие кнопки общего останова всех электроприводов;
14. невозможность включения и автоматический останов в процессе работы, привода М1 при нарушении целостности двухстороннего охранного ограждения;
15. невозможность включения и автоматический останов в процессе работы, привода М2 при нарушении целостности одностороннего охранного ограждения;
16. максимально-токовая защита электропривода М1 при помощи токовых реле;
17. защита от перегрузки электропривода М1 при помощи тепловых реле;
18. наличие контрольной световой сигнализации включенного состояния электроприводов и наличие напряжения в схеме управления;
19. наличие электрических видов защит электроприводов М2, М3, М4, М5 с учётом режима работы электропривода и рекомендаций по обеспечению безопасных условий работы персонала.
Исходные данные для расчёта мощности электродвигателей производственной установки:
Привод цепного конвейера подачи бруса: подача конвейера = 1 – 25 м3/ч: 2 – 15 м3/ч: 3 – 20 м3/ч; длина конвейера = 1 – 20 м: 2 – 15 м: 3 – 25 м; конвейер со скользящими цепями.
Привод ленточного конвейера удаления досок: мощность электродвигателей данных механизмов определяется по нагрузочным диаграммам электроприводов, выданных преподавателем, осуществляющим руководство курсовым проектированием.
Привод механизма резания: диаметр пилы = 1 – 630 мм: 2 – 500 мм: 3 – 710 мм; скорость подачи бруса = 1 – 0,1 м/с: 2 – 0,2 м/с: 3 – 0,15 м/с; параметры бруса = 1 – 6000х200х200 мм: 2 – 6000х150х150 мм: 3 – 4000х200х150 мм.
Привод ленточного конвейера удаления отходов пиления: мощность электродвигателя данного механизма определяется по нагрузочной диаграмме электропривода, выданной преподавателем, осуществляющим руководство курсовым проектированием.
Привод электрогидравлического толкателя тормоза механизма резания: требуемое усилие на расжатие колодок тормоза = 1 – 600 Н: 2 – 2000 Н: 3 – 1600 Н.

| № участка | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ,с |
| Р, кВт | 3,6 | 4,8 | 4,6 | 4,6 | 4,4 | 4,5 | 4,4 | 4,3 | 4,3 | 4 | 18000 |
| t, c | 1800 | 1860 | 1860 | 1860 | 1680 | 1800 | 1980 | 1620 | 1620 | 1920 |
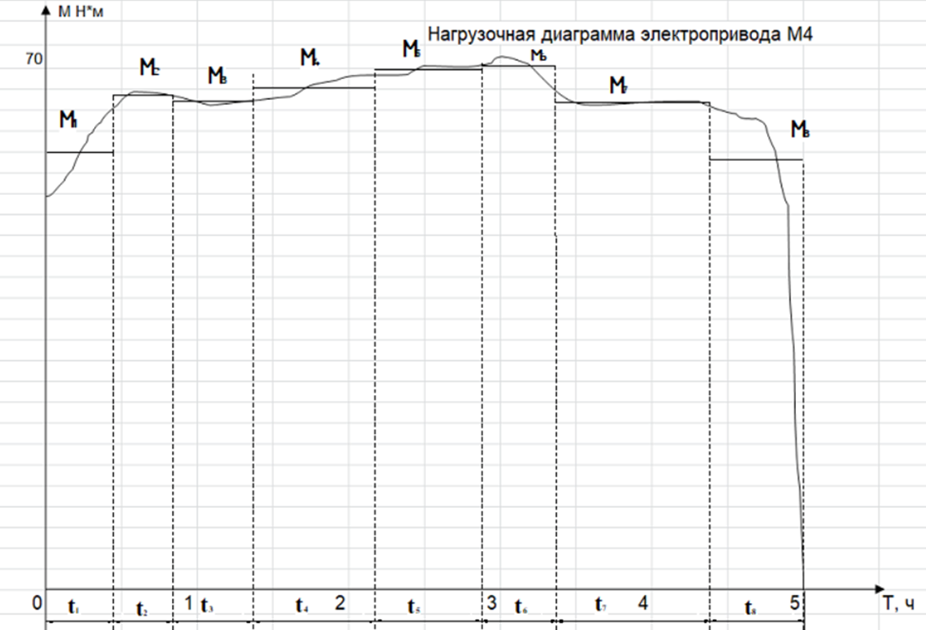
| № участка | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | ,с |
| Р, кВт | 58,8 | 66,8 | 66,4 | 67,2 | 69,8 | 70 | 64,4 | 58,0 | 18000 |
| t, c | 1620 | 1620 | 1920 | 2880 | 2400 | 1800 | 3780 | 1980 |
ВВЕДЕНИЕ…………...……………………………………………………….……..…8
1 РАСЧЁТ МОЩНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПО НАГРУЗОЧНОЙ ДИАГРАММЕ МЕТОДОМ ЭКВИВАЛЕНТНОГО ТОКА (МОЩНОСТИ, МОМЕНТА)……………………….………………………………………………...….9
1.1Определение режима работы электропривода по нагрузочной диаграмме……………………………………………………………………….…..…..9
1.2 Расчёт эквивалентного тока (мощности, момента)………………..…………..9
- Предварительный выбор электродвигателя….……………………………..…11
- 1.4 Проверка электродвигателя на перегрузочную способность……………..…11
- 1.5 Окончательный выбор электродвигателя.……………………………………14
- РАСЧЁТ И ВЫБОР ТИПА ЭЛЕКТРОДВИГАТЕЛЕЙ ПРОИЗВОДСТВЕННОЙ УСТАНОВКИ………………………………………….……………….……………..15
4 РАСЧЁТ И ОБОСНОВАНИЕ ВЫБОРА АППАРАТУРЫ ……..………….……..22
4.1 Расчёт и обоснование выбора аппаратуры управления электрическими цепями ………………………………………………………………………….……...22
4.2 Расчет и обоснование выбора аппаратуры сигнализации……………...……25
4.3 Расчёт и обоснование выбора аппаратуры защиты……………………….….25
4.4 Расчёт и обоснование выбора аппаратуры контроля параметров…………..29
4.5 Расчёт и обоснование выбора проводов и кабелей…………………………..29
ЗАКЛЮЧЕНИЕ………………………………………………………….…………….31
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ……………………..…………..32
Характеристики курсовой работы
Предмет
Просмотров
21
Качество
Идеальное компьютерное
Размер
527,57 Kb
Список файлов
primer (3).docx

Если нужен другой вариант работы или отдельная задача из любой работы, пишите в комментарии
23 июня 2025 в 15:32
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора

Отзыв
Архитектура гражданских и промышленных зданий
Огромное спасибо! Сдала на 5
Отзыв
Отзыв
Отзыв
Архитектура гражданских и промышленных зданий
Зачет 30 из 30 🫰
Отзыв
Расчетное задание
Спасибо большое за работу! Сначала возникла проблема с файлом, но ее быстро решили!

















