
Основные понятия метода конечных элементов
1.2. Основные понятия метода конечных элементов
С точки зрения математики, метод конечных элементов является численным методом решения дифференциальных уравнений, встречающихся в физике и в технике. Дифференциальные уравнения используются для математического описания различных процессов, происходящих в сплошных средах, например: теплопроводности, распределения электромагнитных и акустических полей, движения жидкости и плазмы, перемещений и усилий деформируемых телах и многих других.
Область применения МКЭ достаточно широка [2]: летательные аппараты, автомобили, суда, подвижной состав железных дорог, стальные и железобетонные мосты; каркасы зданий; влияние землетрясений на плотины и дамбы; механика горных пород; пластичность и механика разрушения конструкционных материалов; динамика затопленных конструкций: композитные материалы; вязкие, дозвуковые и сверхзвуковые течения; флаттер; звуковая локация; акустические пола; электромагнитные поля; проектирование магнитов; газовая динамика плазмы; потоки в ядерных реакторах; движение ледников; тектонические движения плит; поверхностные и подземные водные потоки; проектирование нефте- и газохранилищ; биомеханика; распространение загрязнений в морских заливах; поверхностные волны; самовоспламенение.
Применительно к строительной механике метод конечных элементов - один из основных методов решения задач механики деформируемого упругого тела. Идея метода заключается в аппроксимации сплошной среды с бесконечным числом степеней свободы совокупностью простых элементов, имеющих конечное число степеней свободы и связанных между собой в узловых точках. В этих точках прикладывают некоторые фиктивные усилия взаимодействия, характеризующие действие распределенных внутренних напряжений, приложенных вдоль границ стыковки смежных элементов. На рис.1.2 приведен
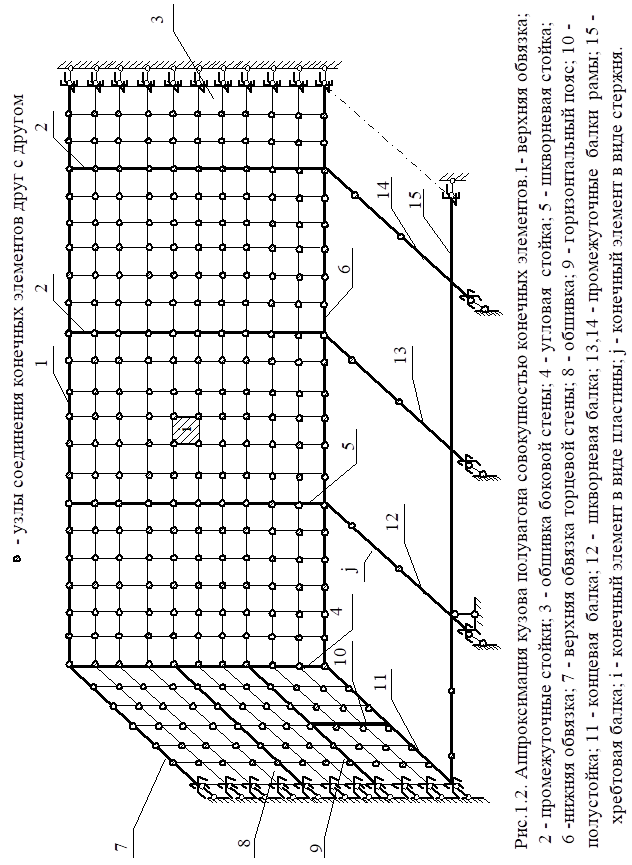
пример аппроксимации кузова полувагона совокупностью простых элементов (тонких пластин и стержней). Как видно из рисунка, использование МКЭ обеспечивает максимальное приближение расчетной схемы к исходной конструкции.
К самым общим чертам МКЭ относятся следующие:
1) физическая область задачи делится на подобласти, или конечные
элементы;
Рекомендуемые материалы
2) зависимая переменная (одна или несколько) аппроксимируется функцией специалъного вида на каждом конечном элементе и, следовательно, на всей области. Параметры этих аппроксимаций в последующем становятся неизвестными параметрами задачи. В задачах строительной механики аппроксимации подлежит поле перемещений точек конечного элемента или усилий в них, а неизвестными параметрами являются узловые перемещения или узловые усилия;
3) подстановка аппроксимаций в определяющие уравнения дает систему множества уравнений с неизвестными параметрами. Решая эти уравнения, определяет значения этих параметров и, соответственно, получают приближенное решение задачи.
Применительно к задачам строительной механики эта процедура за-ключается в составлении уравнений равновесия в узлах или записи условий равенства узловых перемещений. Решение этих уравнений дает возможность определить перемещения или усилия в каждом узле расчетной схемы. В дальнейшем через эти параметры определяются перемещения и усилия, напряжения внутри отдельных конечных элементов.
1.2.1. Типы конечных элементов. Основные уравнения МКЭ
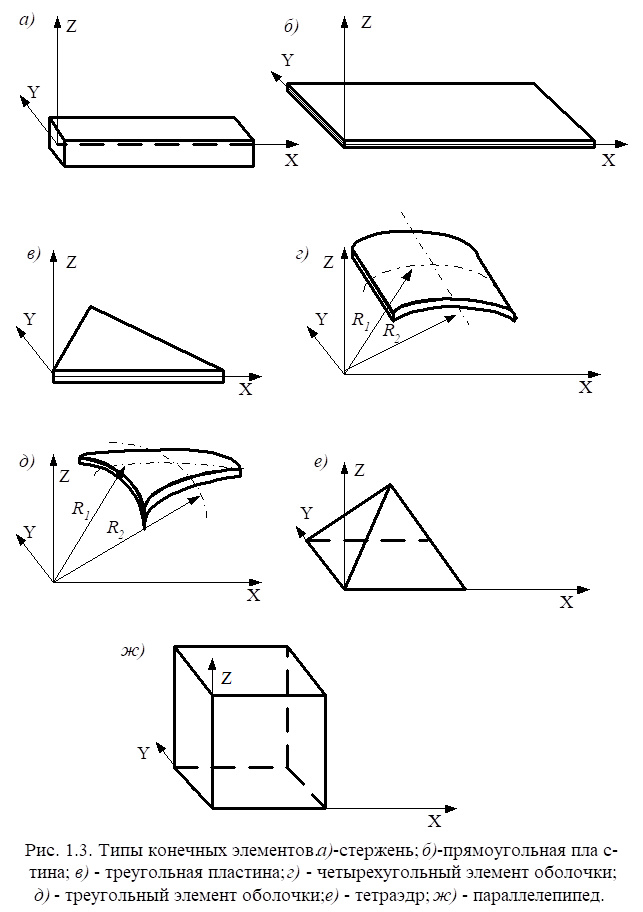
Идеализация, приводящая исходную конструкцию к совокупности конечных элементов, связанных между собой лишь в узловых точках, требует, чтобы напряженное состояние в каждом из элементов однозначно определялось через значения узловых перемещений (или узловых усилий). Это условие легче выполнить при наличии конечных элементов простой формы.
Наиболее часто в качестве конечных элементов используются стержни, элементы пластин в виде треугольных и прямоугольных полей для пластин и оболочек, в виде тетраэдров и параллелепипедов для массивных тел (рис. 1.3).
Расчет по МКЭ может быть произведен в форме метода сил, когда за неизвестные принимаются силы взаимодействия между конечными элементами в местах их соединения, или в форме метода перемещений, когда за неизвестные принимаются перемещения узлов соединяемых элементов. Может быть применен и смешанный метод.
В методе сил неизвестные силы должны обеспечить равенство перемещений конечных элементов в местах их соединения (узлах), а в методе перемещений неизвестные перемещения - равновесие узлов.
Наиболее широкое распространение получил МКЭ в форме метода перемещений. В связи с этим ниже рассматривается именно эта форма МКЭ.
При использовании МКЭ в форме метода перемещений в пределах конечного элемента строятся аппроксимирующие функции, образующие кинематически допустимые поля перемещений в пределах всей исследуемой области. Узловые перемещения определяются на основе вариационного принципа Лагранжа, в соответствии с которым из всех кинематически допустимых полей перемещений действительным полем перемещений является то, которое удовлетворяет условиям равновесия.
Вариационное уравнение Лагранжа имеет вид
 (1.9)
(1.9)
где: δЭ - полная потенциальная энергия упругой системы, которая складывается из потенциальной энергии деформации (П) и потенциальной энергии внешних сил (А); δ – знак вариации – изменения функции при бесконечно малом изменении одного из аргументов.
Таким образом, для того чтобы получить разрешающие уравнения МКЭ, необходимо располагать уравнением полной потенциальной энергии рассматриваемой упругой системы.
Полная потенциальная энергия системы определяется на основании известных соотношений теории упругости. Под действием объемных и поверхностных внешних сил отдельные точки конструкции получают перемещения, при которых несущие элементы деформируются, и в них возникают напряжения.
Перемещения, деформации, напряжения неодинаковы в различных точках конструкции и является функциями координат. Для удобства расчётов указанные величины, включая нагрузки, рассматриваются в проекциях на оси координат.
Введем следующие обозначения:
а) матрица – столбец объемных сил  (1.10)
(1.10)
где  проекции объемных сил на соответствующие декартовые оси координат , в которых располагается рассматриваемая конструкция;
проекции объемных сил на соответствующие декартовые оси координат , в которых располагается рассматриваемая конструкция;
б) матрица – столбец поверхностных сил  (1.11)
(1.11)
где  аналогично предыдущему проекции поверхностных сил;
аналогично предыдущему проекции поверхностных сил;
в) матрица – столбец перемещений  (1.12)
(1.12)
где  проекции перемещений точек на оси координат X,Y,Z . Эти проекции являются функциями, аргументами которых служат координаты x,y и z;
проекции перемещений точек на оси координат X,Y,Z . Эти проекции являются функциями, аргументами которых служат координаты x,y и z;
г) матрица – столбец деформаций  (1.13)
(1.13)
где  проекции линейных деформаций, а
проекции линейных деформаций, а  проекции угловых деформаций;
проекции угловых деформаций;
. д) матрица – столбец напряжений  (1.14)
(1.14)
где  проекции нормальных напряжений, а
проекции нормальных напряжений, а  касательных.
касательных.
Между деформациями и перемещениями существует дифференциальная зависимость, выражаемая уравнениями Коши
 (1.15)
(1.15)
где [d] – дифференциальный матричный оператор вида

В результате матричной операции  получается матрица, элементами которой являются частные производные.
получается матрица, элементами которой являются частные производные.
Между напряжениями и деформациями также имеется линейная зависимость (при работе материала конструкции в пределах закона Гука). В матричной форме эта зависимость имеет вид:
 (1.16)
(1.16)
где [Еξ] – матрица упругости вида:
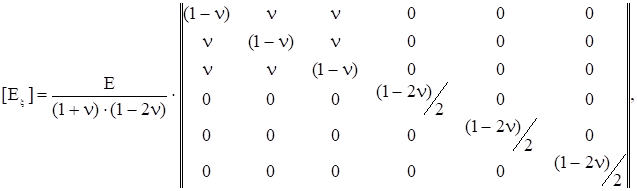
где Е – модуль упругости материала;
ν – коэффициент Пуассона.
Потенциальная энергия деформации, численно равная работе внутренних сил, определяется из следующих выражений:
 (1.17)
(1.17)
где Т – знак транспонирования – замены столбцов матрицы строками путем их поворота против часовой стрелки.
С учетом выражения (1.15)  (1.18)
(1.18)
В выражениях (1.16) (1.17) интеграл берется по объему V.
Потенциальная энергия внешних сил, численно равная работе этих сил на перемещениях U(x,y,z)
 (1.19)
(1.19)
В выражении (1.19) второй интеграл берется по поверхности тела S.
Полная потенциальная энергия всей конструкции равна сумме работ внешних и внутренних сил
 (1.20)
(1.20)
При определении полной потенциальной энергии конечного элемента задаются законом изменения перемещений Fik(x,y,z), позволяющим выразить перемещения любой точки через перемещения узлов и функцию координат. В матричной форме для i-того конечного элемента
 (1.21)
(1.21)
где  - транспонированная матрица – столбец узловых перемещений i-того конечного элемента;
- транспонированная матрица – столбец узловых перемещений i-того конечного элемента;
j – номер узлового перемещения;
n – количество степеней свободы (узловых перемещений) конечного элемента;
 матрица функций форм
матрица функций форм
конечного элемента.
Обычно функции формы принимают кусочно-полиноминальными, отличными от нуля в окрестности только одного узла [3].
С учетом выражения (1.21) полная потенциальная энергия конечного элемента

 (1.22)
(1.22)
Учитывая, что  не зависит от координат, этот вектор можно вынести за знак интеграла. Выражение (1.22) при этом преобразуется к виду:
не зависит от координат, этот вектор можно вынести за знак интеграла. Выражение (1.22) при этом преобразуется к виду:
 (1.23)
(1.23)
где  -матрица жесткости i-того конечного элемента (КЭ). Она определяет жесткостные свойства КЭ;
-матрица жесткости i-того конечного элемента (КЭ). Она определяет жесткостные свойства КЭ;
 - грузовой вектор i-того конечного элемента.
- грузовой вектор i-того конечного элемента.
Полная потенциальная энергия рассматриваемой системы (конструкции), состоящей из N конечных элементов, равна сумме энергий конечных элементов:
 (1.24)
(1.24)
Продифференцировав полную энергию Э по узловым перемещениям qj и используя принцип Лагранжа, получим:
 (1.25)
(1.25)
Сумма  является общей матрицей жесткости системы в целом. Как видно из приведенного выше выражения, она получается суммированием матриц жесткости отдельных конечных элементов. Вектор-столбец
является общей матрицей жесткости системы в целом. Как видно из приведенного выше выражения, она получается суммированием матриц жесткости отдельных конечных элементов. Вектор-столбец  составлен из векторов, элементами которых являются неизвестные узловые перемещения.
составлен из векторов, элементами которых являются неизвестные узловые перемещения.  грузовой вектор, элементами которого являются значения внешней нагрузки, приведенной к узловой. Как и общая матрица жесткости [C0], грузовой вектор Р получается суммированием грузовых векторов отдельных конечных элементов. С учетом принятых выше обозначений, выражение (1.25) можно записать в виде:
грузовой вектор, элементами которого являются значения внешней нагрузки, приведенной к узловой. Как и общая матрица жесткости [C0], грузовой вектор Р получается суммированием грузовых векторов отдельных конечных элементов. С учетом принятых выше обозначений, выражение (1.25) можно записать в виде:
 (1.26)
(1.26)
Уравнение (1.26) является основным разрешающим уравнением МКЭ. С физической точки зрения оно описывает равновесие узлов системы, а с математической – систему обыкновенных алгебраических уравнений. В приведенном виде (1.26) представляет собой тождество, так как не учтены условия закрепления конструкции. Чтобы получить единственное решение отличное от нуля, необходимо учесть связи наложенные на систему. Эта процедура выполняется вычеркиванием строк и столбцов в матрицах уравнения (1.26), которые соответствуют перемещениям, запрещенным связями. После этого матрицы «сжимаются» и производится решение уравнения (1.26).
Решение системы алгебраических уравнений производится методами линейной алгебры [3]. Наиболее распространенным является метод Гаусса.
После решения уравнения (1.26) и определения ранее неизвестных перемещений, производится формирование векторов узловых перемещений для каждого конечного элемента. При выполнении этой операции учитываются связи, наложенные на рассматриваемую систему. Далее определяются узловые усилия
 (1.27)
(1.27)
По найденным узловым усилиям и приложенным внешним нагрузкам строятся эпюры внутренних усилий (изгибающих и крутящих моментов, нормальных и поперечных усилий). Далее в наиболее опасных сечениях по формулам сопромата находятся напряжения.
Следует отметить, что изложенное выше отражает сущность МКЭ в самой общей форме.
1.2.2. Общие (глобальные) и местные (локальные) системы координат
Наиболее сложным и ответственным этапом решения задач по МКЭ является выбор функции формы перемещений при выводе матриц жесткости конечных элементов. Правильный и удачный их выбор обеспечивает простоту вычислений и достаточную точность [4].
В предыдущих выкладках полагалось, что функции формы получаются в декартовой системе координат, общей для всех конечных элементов рассматриваемой системы. При практической реализации МКЭ такой подход привел бы к необходимости вывода функций формы для однотипных конечных элементов в зависимости от их расположения в общей системе координат и, соответственно, получения различных матриц жесткости. Все это приводит к потере одного из самых важных свойств МКЭ - универсальности - при решении любых задач строительной механики и теории упругости,
Для устранения указанного обстоятельства, в МКЭ используют общую (глобальную) и местную (локальную) системы координат. Общая система координат принимается для всей расчетной схемы, состоящей из совокупности конечных элементов. Кроме этого, каждый конечный элемент располагается в собственной, местной (локальной) системе координат, строго ориентированной относительно конечного элемента [2].
Матрица жесткости конечных элементов выводится при использовании местной системы координат. Такой подход позволяет получить для всех однотипных элементов матрицы жесткости одного вида и создать библиотеку таких матриц для конечных элементов различных типов.
Общая матрица жесткости системы [С0] формируется из матриц жесткости отдельных конечных элементов, полученных в общей систем координат. Поэтому перед выполнением этого этапа расчета необходимо привести матрицы жесткости конечных элементов, полученные в местных системах координат, к общей системе координат. Эта операция выполняется с помощь так называемых матриц направляющих косинусов преобразования координат.
Матричная процедура приведения матриц жесткости из местной к общей системе координат имеет вид:
 (1.28)
(1.28)
где  - матрица жесткости i-того конечного элемента в общей системе координат;
- матрица жесткости i-того конечного элемента в общей системе координат;
 матрица жесткости этого КЭ в местной системе координат;
матрица жесткости этого КЭ в местной системе координат;
 - матрица направлявших косинусов (преобразования координат) i-того КЭ;
- матрица направлявших косинусов (преобразования координат) i-того КЭ;
 - матрица, транспонированная по отношению к исходной матрице [Т].
- матрица, транспонированная по отношению к исходной матрице [Т].
Структура и порядок вывода матриц преобразования координат рассмотрены в разделе 1.2.4.
С учетом выражения (1.28) уравнение (1.25) принимает вид:
 (1.29)
(1.29)
а общая матрица жесткости 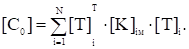
Матрицы преобразования координат используются и при вычислении грузовых векторов. В частности, вектор  в выражении (1.23) определяется следующим образом:
в выражении (1.23) определяется следующим образом:
 (1.30)
(1.30)
Корректировке подлежит и процедура определения вектора узловых усилий. Выражение (1.27) принимает вид;
 (1.31)
(1.31)
1.2.3. ВЫВОД МАТРИЦЫ ЖЕСТКОСТИ КОНЕЧНОГО ЭЛЕМЕНТА В ВИДЕ СТЕРЖНЯ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ
Рассмотрим вывод матрицы жесткости призматического элемента в виде стержня. Вначале получим матрицу жесткости при плоском изгибе в местной системе координат. Затем подучим матрицу жесткости с учетом деформаций изгиба и растяжения-сжатия.
Для призматического элемента балки примем следующие направления координатных осей: ось X совмещена с осью балки, а ось Y совпадает с главной центральной ось инерции поперечного сечения. Начало координат располагается в первом (левом) узле стержня (рис. 1.4).
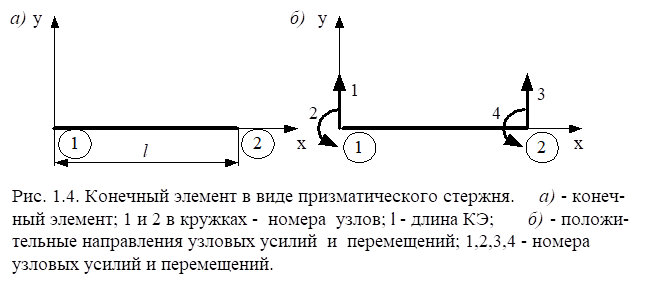
Рассматриваемый конечный элемент загружен усилиями взаимодействия со смежными элементами R1, R2, R3, R4, которые в дальнейшем будем рассматривать в качестве вектора узловых усилий  . Кроме этого введем в рассмотрение вектор узловых перемещений
. Кроме этого введем в рассмотрение вектор узловых перемещений  Положительные направления компонентов вектора узловых усилий и вектора узловых перемещений приведены на рис. 1.4.
Положительные направления компонентов вектора узловых усилий и вектора узловых перемещений приведены на рис. 1.4.
Из изложенного выше следует, что для получения матрицы жесткости необходимо располагать выражением потенциальной энергии деформации конечного элемента. Для этого, в свою очередь, необходимо знать поле перемещений, представленное в виде функции. Для стержней эта функция может быть получена путем решения дифференциального уравнения изгиба балки.
Уравнения изгиба балки имеет вид:
 (1.31)
(1.31)
где E – модуль упругости;
J – момент инерции поперечного сечения стержня;
v(x) – вертикальные перемещения сечения стержня на расстоянии х от начала стержня.
Решением уравнения (1.31) является выражение:
 (1.32)
(1.32)
где ai – (i=1…4) – произвольные параметры, подлежащие определению.
Параметры ai можно выразить через узловые перемещения qi. Для этого воспользуемся выражением (1.32):
 (1.33)
(1.33)
Из выражений (1.33) имеем
 (1.34)
(1.34)
С учетом (1.34) выражение (1.32) примет следующий вид:

(1.35)
Сгруппируем слагаемые в выражении (1.35) относительно узловых перемещений qi . В результате получим:
 (1.36)
(1.36)
Введем следующие обозначения:
 (1.37)
(1.37)
С учетом принятых обозначений, выражение (1.36) можно записать в виде:
 (1.38)
(1.38)
Эi(х) представляют собой так называемые одномерные функции Эрмита. Эти функции удовлетворяют следующим условиям:
 (1.39)
(1.39)
Из выражений (1.38) и (1.39) следует, что каждая i-я функция Эрмита определяет изгиб жестко заделанной балки, которая получила единичное смещение по i-тому направлению (qi=1). Эти четыре единичных состояния приведены на рис. 1.5.
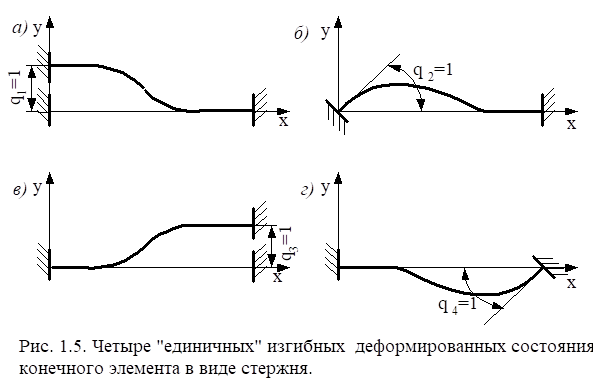
На этом рисунке а) и в) - деформированное состояние при узловых вертикальных линейных перемещениях; б) и г) – при угловых поворотах заделок левого и правого узлов.
Таким образом, выражение (1.38) представляет собой функцию, описывающую все возможные вертикальные перемещения сечений стержня.
Потенциальная энергия деформации стержня:
 (1.40)
(1.40)
После выполнения операции дифференцирования и интегрирования в выражении (1.40) получаем:
 (1.41)
(1.41)
Матрица жесткости конечного элемента получается путем использования принципа Лагранжа:
 (1.42)
(1.42)
где  - вариация, бесконечно малое изменение qi.
- вариация, бесконечно малое изменение qi.
Так как по смыслу  то
то  В этом выражении
В этом выражении  дает матрицу жесткости конечного элемента:
дает матрицу жесткости конечного элемента:
 (1.43)
(1.43)
Выражения (1.43) в матричной форме имеют вид:
 (1.44)
(1.44)
В выражении (1.44) матрица [К]i является искомой матрицей жесткости конечного элемента. Эта матрица связывает узловые перемещения  и узловые усилия
и узловые усилия  :
:
 . (1.45)
. (1.45)
Элементы матрица [K]i симметричны относительно главной диагонали. Физический смысл элементов матрицы жесткости виден из выражения (1.44) – любой элемент этой матрицы kij численно равен реактивному узловому усилию в жестко заделанном узле стержня по i-тому направлению при единичном смещении по j-тому направлению (qj=1).
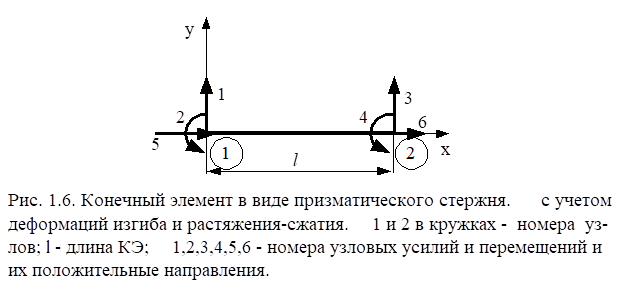
Рассмотрим вывод матрицы жесткости стержня при совместном учете деформаций изгиба и растяжения-сжатия. На рис. 1.6. показаны положительные направления узловых усилий и перемещений с учетом действия продольной нагрузки.
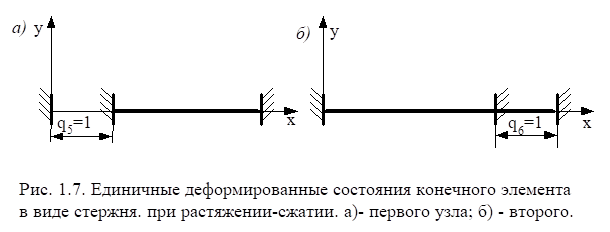
Введение продольной силы требует рассмотрения еще двух «единичных» состояний элемента, приведенные на рис. 1.7.
Перемещение сечения стержня на произвольном расстоянии х от начала координат по направлению оси х можно выразить через его узловые перемещения с помощью зависимости

где Эi(х) – функции, подобные функциям Эрмита. Они определяются из дифференциального уравнения растяжения-сжатия стержня
 (1.46)
(1.46)
где F – площадь сечения стержня.
Решением уравнения (1.46) является выражение 
где С и D – постоянные интегрирования, которые можно выразить через узловые перемещения q5 и q6.
При х=0, q5=С; при х=l, q6=q5+D*l, откуда  Тогда
Тогда
 или
или
 (1.47)
(1.47)
В выражении (1.47)

 (1.48)
(1.48)
Чтобы определить матрицу жесткости, вновь воспользуемся выражением потенциальной энергии элемента, которое с учетом деформаций изгиба и растяжения-сжатия примет вид:
 (1.49)
(1.49)
Составляющая потенциальной энергии, обусловленная изгибом стержня, определена выше (1.41). Второе слагаемое в выражении (1.49) представляет собой потенциальную энергию Пр, связанную с растяжением-сжатием стержня.
После интегрирования
 . (1.50)
. (1.50)
Взяв частные производные от Пр по q5 и q6, получим:
 (1.51)
(1.51)
Выражения (1.51) нужно добавить к выражениям (1.43). С учетом этой операции, матричное выражение (1.44) примет следующий вид:
 (1.52)
(1.52)
Матрица [K]i имеет блочную структуру. Это обусловлено тем, что в приведенных выкладках не учитывалось влияние деформаций растяжения-сжатия на изгиб стержня (т.е. считалось, что деформации изгиба и растяжения-сжатия не зависят друг от друга). Такой подход допустим при малых деформациях стержня.
Принятая при выводе матрицы жесткости стержня нумерация узловых перемещений и усилий (рис. 1.4) и (рис. 1.6) приводит к некоторым неудобствам при формировании общей матрицы жесткости системы. С этой точки зрения, более удобной является нумерация, приведенная на рис.1.8.
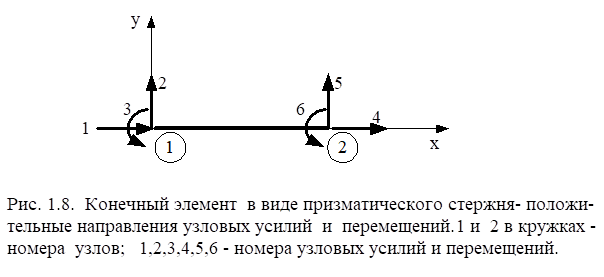
С учетом новой нумерации матрица жесткости стержня с шестью степенями свободы примет вид:
 (1.53)
(1.53)
Аналогично, с методической точки зрения, производится учет деформаций сдвига при выводе матрицы жесткости рассматриваемого конечного элемента, а также матрицы жесткости стержня с двенадцатью степенями свободы (пространственный стержень). Вывод и вид этих матриц приведен в [5] и другой многочисленной литературе по МКЭ.
В заключении по этому подразделу следует отметить, что функции формы (в данном случае функции Эрмита при изгибе и подобные им функции при растяжении-сжатии) получаются из дифференциальных уравнений изгиба и растяжения-сжатия стержня. Поэтому решение по МКЭ для стержневых систем получается точным - абсолютно таким же, как при решении задач другими методами строительной механики (методом сил или методом перемещений).
Для стержневых систем метод конечных элементов представляет собой метод перемещений в особой матричной форме, без построения эпюр в основной системе исходных «единичных» эпюр, удобной для реализации алгоритма на ЭВМ.
Рассмотренный метод получения матрицы жесткости стержня не является единственным. Элементы этих матриц, представляющие собой реактивные усилия в узлах, могут быть получены методом сил. В методе перемещений эти усилия используются в виде готовых к использованию выражений.
1.2.4. ВЫВОД МАТРИЦЫ НАПРАВЛЯЮЩИХ КОСИНУСОВ (ПРЕОБРАЗОВАНИЯ КООРДИНАТ) ДЛЯ СТЕРЖНЕВОГО КОНЕЧНОГО ЭЛЕМЕНТА С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ
Как отмечалось ранее, при формировании общей матрицы жесткости системы необходимо матрицы жесткости отдельных конечных элементов, полученные в местной системе координат, привести к общей системе координат. Эта операция выполняется с помощью матриц направляющих косинусов.
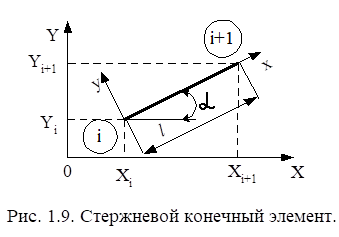
На рис. 1.9 приведен конечный элемент в виде стержня с шестью степенями свободы. На этом рисунке: Х, Y – общая (глобальная) система координат; х, y – местная (локальная) система координат; α – угол наклона стержня; l – длина конечного элемента; i и i+1, помещенные в кружках – номера узлов.
Установим связь между узловыми перемещениями в общей и местной системах координат. Эта связь определяется из чисто геометрических соображений путем проектирования компонентов узловых перемещений в общей системе координат на координатные оси местной системы координат и последующего суммирования проекций на соответствующие оси с учетом направления векторов.
На рис. 1.10: q1 и q2 – компоненты (проекции) результирующего линейного перемещения qл i – го узла конечного элемента; q2 – угловое перемещение i-того узла.
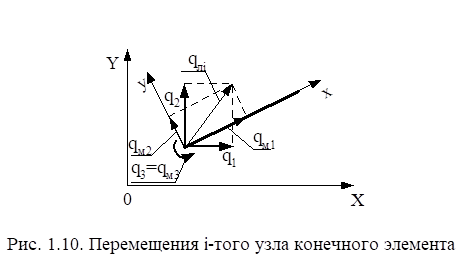
Очевидно, что результирующее линейное перемещение i-того узла qлi можно спроектировать на оси местной системы координат x и y. Полученные при этой операции проекции qм1 и qм2 являются компонентами перемещения qлi в местной системе координат. Угловое перемещение узла q3 не зависит от системы координат.
Компоненты перемещений qлi и q3 в местной системе координат (qм1 , qм2 и qм3) можно выразить через компоненты этих перемещений в общей системе координат (q1 , q2 и q3) [5]:
 (1.54)
(1.54)
Аналогичную процедуру можно выполнить и для второго узла (i+1):
 (1.55)
(1.55)
В матричной форме выражения (1.54) и (1.55) имеют следующий вид:
 (1.56)
(1.56)
или  (1.57)
(1.57)
где  - вектор узловых перемещений в местной системе координат;
- вектор узловых перемещений в местной системе координат;
 - вектор узловых перемещений в общей системе координат;
- вектор узловых перемещений в общей системе координат;
 - искомая матрица направляющих косинусов (преобразования координат).
- искомая матрица направляющих косинусов (преобразования координат).
Матрица [T] имеет блочную структуру вида
 (1.58)
(1.58)
где
 (1.59)
(1.59)
где k=cosα, m=sinα.
Элементы матрицы направляющих косинусов k и m можно вычислить по координатам узлов конечного элемента в общей системе координат (рис. 1.9):

 (1.60)
(1.60)
Аналогично рассмотренному выводятся матрицы направляющих косинусов для других типов конечных элементов.
1.2.5. ВЫВОД ГРУЗОВОГО ВЕКТОРА ДЛЯ КОНЕЧНОГО ЭЛЕМЕНТА В ВИДЕ СТЕРЖНЯ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ
Нагрузка на конструкцию, рассчитываемую по МКЭ, может быть приложена в узлах (узловая нагрузка) и внутри конечных элементов. Наиболее просто формируется общий грузовой вектор системы при наличии узловой нагрузки. В этом случае в общем грузовом векторе на место элемента, определяемом номером перемещения по которому действует внешнее усилие, записывается значение нагрузки с определенным знаком. Знак «плюс» соответствует случаю, когда направление усилия совпадает с положительным направлением перемещения, а знак «минус» - когда усилие действует в противоположном направлении.
Нагрузка приложенная внутри конечного элемента, приводится к узловой. Методика получения грузового вектора заложена в принципе Лагранжа, лежащего в основе вывода основного разрешающего уравнения МКЭ.
При выводе матрицы жесткости конечного элемента используется часть выражения полной потенциальной энергии системы, связанной с работой сил упругости. Второе слагаемое полной потенциальной энергии – работа внешних нагрузок – дает, при использовании принципа Лагранжа, грузовой вектор.
Аналогично процедуре вывода матрицы жесткости конечного элемента для получения грузового вектора необходимо вывести выражение работы внешней нагрузки и взять частные производные по узловым перемещениям.
На рис.1.11. приведен конечный элемент в виде стержня с шестью степенями свободы, загруженный различными видами нагрузок. Для простоты все виды сосредоточенных нагрузок приняты приложенными в одной точке с координатой Хс.
Работа внешней нагрузки, как известно, равна произведению силы на перемещение (или момента на угол поворота).
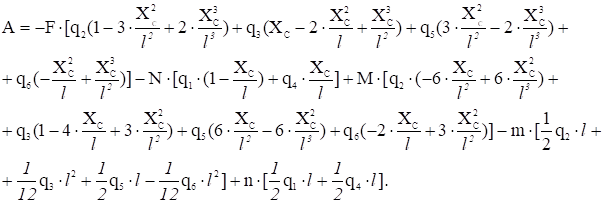
В рассматриваемом случае
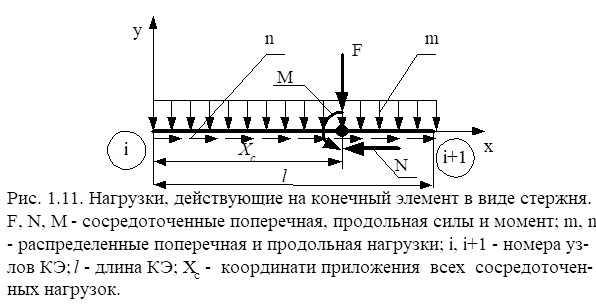
 (1.61)
(1.61)
где первое слагаемое – работа силы F, второе – работа продольной силы N, третье – работа момента M, четвертое и пятое – работа распределенных сил m и n; v(x) и U(x) функции форм перемещений (1.36) и (1.47).
После подстановки функций v(x) и U(x) в (1.61), с учетом нумерации перемещений, приведенной на рис. 1.8. , и интегрирования получим
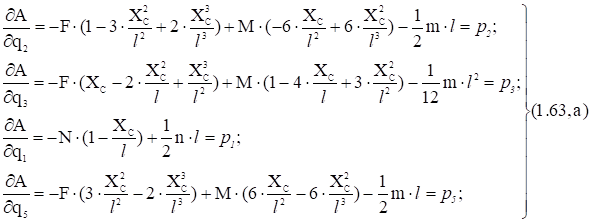 |
 (1.62)
(1.62)  (1.63,б)
(1.63,б)
Таким образом, грузовой вектор
 (1.64)
(1.64)
С помощью выражений (1.63) нагрузка, приложенная внутри конечного элемента, приводится к узловой.
Приведенный вывод грузового вектора является иллюстрацией общего подхода к получению таких векторов для других типов конечных элементов.
Перед формированием общего грузового вектора системы в целом, грузовой вектор, рассчитанный в местной системе координат, должен быть приведен к общей системе координат с помощью матричной операции:
 (1.65)
(1.65)
где  - грузовой вектор i-того конечного элемента в общей системе координат, а
- грузовой вектор i-того конечного элемента в общей системе координат, а  - в местной.
- в местной.
1.2.6. ОСНОВНЫЕ ОПЕРАЦИИ ПРИ ПРАКТИЧЕСКОЙ РЕАЛИЗАЦИИ МЕТОДА КОНЕЧНЫХ ЭЛЕМЕНТОВ
Процедура МКЭ при расчёте напряжённо-деформированного состояния различных конструкций включает в себя следующие основные операции:
- идеализацию рассчитываемой конструкции в виде совокупности конечных элементов;
- нумерацию узлов и конечных элементов;
- нумерацию узловых перемещений;
- задание условий закрепления конструкции;
- определение геометрических характеристик конечных элементов и параметров, определяющие упругие свойства материала;
- определение координат узлов системы;
- вычисление матриц жесткости конечных элементов в местной системе координат;
- вычисление матриц направляющих косинусов для элементов, у которых локальная система координат не совпадает с глобальной;
- приведение матриц жёсткости конечных элементов из местной (локальной) к общей (глобальной) системе координат;
- формирование общей матрицы жёсткости рассчитываемой системы;
- вычисление грузовых векторов конечных элементов в местной системе координат;
- приведение грузовых векторов к общей системе координат;
- формирование общего грузового вектора системы;
- учёт граничных условий (условий закрепления конструкции);
- решение основного разрешающего уравнения МКЭ и определение неизвестных ранее узловых перемещений;
- формирование с учётом граничных условий и найденных перемещений векторов узловых перемещений конечных элементов в общей системе координат;
- приведение векторов узловых перемещений конечных элементов к местной системе координат;
- вычисление векторов реактивных узловых усилий;
- определение параметров напряжённого состояния конечных элементов.
- анализ напряжённо-деформированного состояния с точки зрения выполнения условий прочности и жёсткости.
Рассмотрим отдельные операции изложенного, выше алгоритма применительно к расчёту машиностроительных конструкций, к которым относятся узлы и детали вагонов.
Идеализация рассчитываемой конструкции в виде совокупности конечных элементов является первым шагом на пути к решению задачи по МКЭ. Этот шаг не имеет теоретического обоснования, искусство разбиения конструкции на конечные элементы зависит от имеющихся инженерных навыков. Несовершенное разбиение приводит к значительным погрешностям расчёта даже в том случае, когда остальные этапы МКЭ выполнены с достаточной точностью.
Использование слишком мелких элементов, как правило, повышает точность, но приводит к увеличению общей трудоёмкости расчёта. В связи с этим, в местах, где ожидается резкое изменение напряжений, рекомендуемся мелкая разбивка на элементы. Там, где ожидаемые напряжения изменяются сравнительно слабо, можно использовать более крупные конечные элементы.
При расчёте вагонных конструкций признаками для более мелкой разбивки на конечные элементы являются места резкого изменения жесткостных свойств конструкции и наличия концентраторов напряжений: узлов соединения стержневых элементов, пластин различной толщины, пластин и стержневых элементов (например, обшивки и стоек), оконные и дверные вырезы в стенах пассажирских и рефрижераторных вагонов , места соединения цилиндрической части котлов цистерн с днищем и т.д.
Выбор типа, формы элемента и числа его узловых точек зависит от характеристик рассматриваемой задачи и требуемой точности решения. При решении плоских задач (плоское напряжённое состояние) аппроксимация конструкции производится треугольными, четырехугольными плоскими конечными элементами и стержнями с ограниченным числом степеней свободы. Если решается пространственная задача, то используется тетраэдры, прямоугольные параллелепипеды, неправильные шестиугольники (для аппроксимации объемных тел), пространственные стержни (с двенадцатью степенями свободы), пластинки и оболочки.
Выбор типа и формы конечных элементов влияет на точность результатов расчёта. Например, использование конечных элементов в виде пространственных треугольных и четырехугольных пластин при расчёте котлов цистерн приводит к существенным погрешностям расчёта за счет «сломов» в местах соединения отдельных конечных элементов. В этом случае целесообразно использовать оболочечные конечные элементы.
Важной операцией МКЭ является нумерация узлов расчётной схемы. Эта операция была бы тривиальной, если бы номера узлов не влияли на эффективность вычислений, необходимых для получения решения [6]. Использование МКЭ приводит к системе линейных алгебраических уравнений, большое число коэффициентов которой равны нулю. Рассмотрение матрицы коэффициентов системы показывает, что все ненулевые коэффициенты и некоторые нулевые находятся между двумя линиями, параллельными главной диагонали (рис.1.12). Расстояние между главной диагональю и этими линиями называется шириной полосы матрицы.

Все коэффициенты вне этой полосы равны нулю. Наличие большого количества нулей вне ширины ленты и симметрия матриц относительно главной диагонали позволяют сократить потребность в большом объеме машинной памяти, так как достаточно хранить элементы, лежащие в заштрихованной на рис.1.12. области. Уменьшение ширины полосы приводит к сокращению размеров требуемой машинной памяти, а также к сокращению времени вычислений. Ширина полосы В вычисляется по формуле [6]:
B=(R + 1)Q, (1.66)
где R - максимальная по элементам величина наибольшей разности между номерами узлов в отдельном конечном элементе;
Q - число неизвестных перемещений (число степеней свободы) в каждом узле.
Из формулы (1.66) следует общее правило нумерации узлов: эту операцию нужно выполнять так, чтобы разность между номерами узлов в одном конечном элементе была минимальной. Практически это достигается нумерацией узлов в направлении наименьшего размера тела (конструкции).
Нумерации конечных элементов является более простой операцией. Единственным ограничением в этом случае является обеспечение удобства ввода исходной информации о геометрических и физических параметрах конечных элементов в ЭВМ. Обычно в программах ввода (для сокращение объема вводимой информации) используются повторители - операторы цикла. Поэтому желательно последовательно нумеровать однотипные конечные элементы, имеющие одинаковые геометрические и физические параметры.
Нумерация узловых перемещений производится в строгой последовательности, обусловленной принятой ранее нумерацией узлов системы и нумерацией перемещений при получении матриц жесткости конечных элементов.
Одним из ответственных моментов выбора расчётной схемы по МКЭ, влияющими на достоверность результатов расчета, является определение условий закрепления конструкции. В отличие от строительных конструкций, элементы вагонов не имеют ярко выраженной связи с землёй. Сложность выбора условий закрепления вагонных конструкций обусловлена следующими факторами:
- при движении вагона происходит изменение месторасположения точек контакта взаимодействующих друг с другом элементов конструкции (например: пятник -подпятник, скользуны, корпуса букс - буксовые челюсти, фрикционные клинья -колонки боковин тележки, корпуса автосцепок двух сцепленных вагонов);
- отдельные виды нагрузок представляют собой самоуравновешенные силы (усилия распора сыпучим грузом, гидростатическое давление жидкости в котлах цистерн);
- имеет место определённое сочетание нагрузок, обусловленное конкретным режимом работы вагона.
Влияние ошибок при выборе условий закрепления элементов вагонов огромно - может оказаться, что полученные результаты расчёта полностью (и количественно, и качественно) не отвечают реальной картине напряжённо-деформированного состояния конструкции. В связи с этим, при сложном характере загружения рекомендуется использовать принцип суперпозиции – производить расчет на отдельные виды нагружения и суммировать, с учётом знака деформации, результаты расчёта.
Определение геометрических характеристик конечных элементов является наиболее трудоемкой задачей при использовании МКЭ. Это касается, в большей мере, вычисления характеристик стержневых конечных элементов. Для сокращения трудоемкости рассматриваемой операции рекомендуется использование специализированных программ.
Вычисление координат узлов расчетной схемы тривиально, однако требует определенного внимания. Большинство программных комплексов, реализующих МКЭ, предусматривает контроль правильности ввода информации о координатах узлов, а также расчет части координат в самой программе.
Остальные этапы расчета конструкций по МКЭ достаточно подробно рассмотрены в предыдущих подразделах. Исключение составляют операции формирования общей матрицы жесткости системы и грузового вектора, а также вопросы решения основного уравнения МКЭ.
Как отмечалось ранее, элементами общей матрицы жесткости являются реактивные узловые усилия, возникающие при единичных узловых перемещениях. В частности элемент сij матрицы [Co] (1.26) представляет собой суммарное (с учетом всех конечных элементов, соединенных в узле) реактивное усилие по i-тому направлению при единичном смещении по j-тому направлению.
Практически, процесс формирования общей матрицы жесткости представляет собой помещение элементов матриц жесткости отдельных конечных элементов на соответствующие места (элементы) общей матрицы жесткости, определяемые индексами i и j – номерами перемещений. Там, где происходит наложение реактивных усилий нескольких конечных элементов друг на друга, они суммируются.
Для удобства формирования общей матрицы жесткости, перемещения в узле нумеруются последовательно. В связи с этим реактивные усилия в матрицах жесткости отдельных конечных элементов можно разбить на блоки, соответствующие узлам, и процесс формирования осуществлять поблочно.
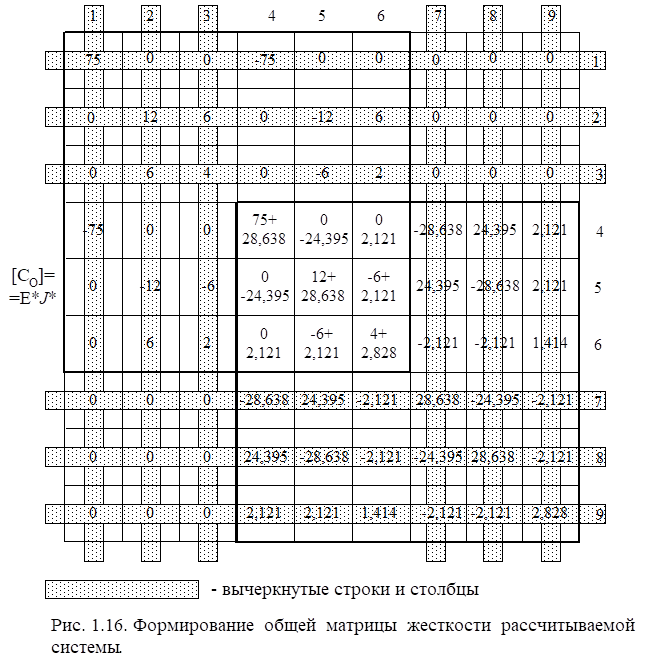
На рис.1.13 приведен пример, иллюстрирующий изложенный выше порядок формирования общей матрицы жесткости.
Расчетная схема (рис.1.13) представляет собой три стержневых элемента, соединенных между собой в узлах 1,2,3. Нагрузка Р, приложенная в узле 3, действует в плоскости чертежа (плоская задача). Каждый узел имеет три степени свободы, а вся рассматриваемая система – девять степеней (без учета условий закрепления). Таким образом, общая матрица жесткости имеет размерность 9 х 9.
Матрицы жесткости конечных элементов, учитывающие деформации изгиба и растяжения-сжатия (1.53), имеют размерность 6 х 6. Блок I этих матриц представляет реактивные усилия в первом узле при единичных перемещениях в этом же узле; блок II – реактивные усилия в первом узле при единичных смещениях во втором узле; блок III – усилия во втором узле при единичных перемещениях в первом узле и блок IV – реактивные усилия во втором узле при единичных перемещениях в этом же узле.
Матрицы жесткости конечных элементов на рис.1.17 имеют разную штриховку. Из рисунка видно, что блоки матриц жесткости отдельных конечных элементов помещаются на место общей матрицы жесткости, определяемое номерами перемещений по горизонтали и вертикали в блоке и в общей матрице (индексы реактивных усилий в указанных массивах одинаковы). Следуя этому принципу, блоки матрицы жесткости первого конечного элемента, имеющие нумерацию узловых перемещений 1,2,3,4,5,6 по горизонтали и вертикали помещаются на элементах общей матрицы жесткости с этими же номерами; блоки матрицы жесткости второго конечного элемента – на места с номерами 4,5,6,7,8,9 по вертикали и горизонтали, при этом блок I2 накладывается на блок IV1 первого конечного элемента. Блок I3 (перемещения 1,2,3) матрицы жесткости третьего конечного элемента помещается в верхнем левом углу общей матрицы жесткости, накладываясь на блок I1; блок II3 – в верхнем правом углу общей матрицы (перемещения 7,8,9 по горизонтали и 1,2,3 по вертикали); блок III3 – в нижнем левом углу (перемещения 1,2,3 по горизонтали и 7,8,9 по вертикали); блок IV3 – в нижнем правом углу (перемещения 7,8,9 по горизонтали и вертикали).
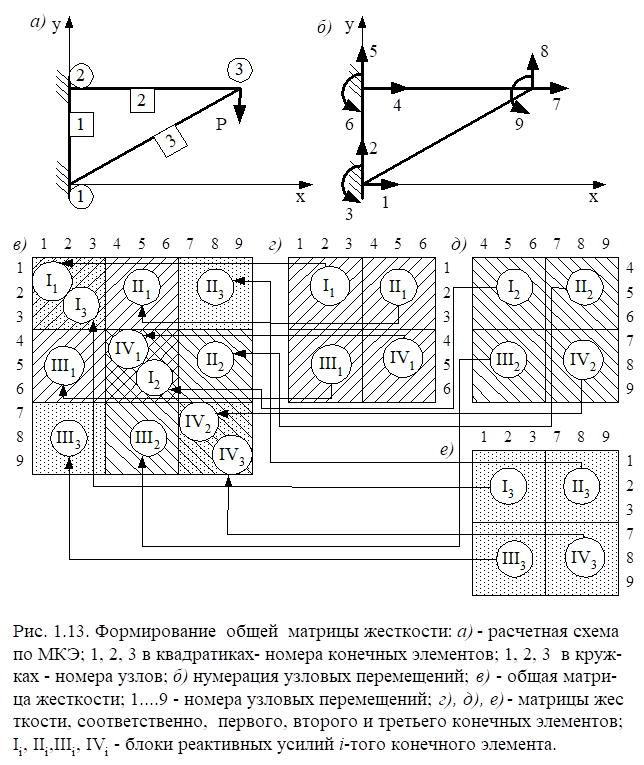
Наложение (суммирование) блоков реактивных усилий происходит при соединении в узле нескольких конечных элементов (двух и более).
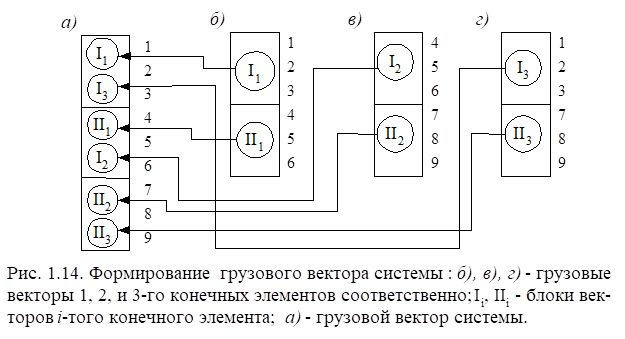
Грузовой вектор системы формируется из грузовых векторов отдельных конечных элементов по принципу, аналогичному формированию общей матрицы жесткости. Применительно к рассматриваемому примеру грузовой вектор (матрица-столбец) системы имеет размерность 9 х 1, а конечных элементов – 6 х 1. На рис.1.14 приведена схема формирования грузового вектора системы, в которой приведенные к узловым нагрузки представлены в виде блоков. Нагрузки, приложенные непосредственно в узле, суммируются с приведенной узловой нагрузкой, действующей по соответствующим направлениям перемещений.
Из рис.1.14 видно, что элементы грузовых векторов конечных элементов занимают свое место в грузовом векторе системы в соответствии с номерами перемещений. Там, где блоки накладываются друг на друга, производится их сложение.
После формирования общей матрицы жесткости и грузового вектора системы производится учет условий закрепления конструкции путем вычеркивания строк и столбцов, соответствующих перемещениям, запрещенными связями. Далее, как отмечалось, производится сжатие указанных матриц и решение системы разрешающих алгебраических уравнений МКЭ.
Достаточно простая логика формирования матрицы [Co] и вектора  позволяет автоматизировать эти операции при использовании ЭВМ.
позволяет автоматизировать эти операции при использовании ЭВМ.
Разрешающие уравнения МКЭ часто имеют очень высокий порядок (десятки тысяч). Эти системы являются симметричными, положительно определенными, разряженными и, как указывалось ранее, для их решения используются как прямые, так и итерационные методы [3]. При выборе метода учитывают объем оперативной и внешней памяти ЭВМ, используемой для расчетов по МКЭ, и объем вычислений.
Для малых задач (десятки и сотни уравнений) обычно используются прямые методы с использованием только оперативной памяти ЭВМ, а для решения больших задач (тысячи уравнений) – прямые методы с организацией обмена между оперативной и внешней памятью ЭВМ. Для решения уникальных задач (десятки тысяч уравнений) используются итерационные методы.
1.2.7. ЧИСЛЕННЫЙ ПРИМЕР РАСЧЕТА КОНСТРУКЦИИ ПО МКЭ
Рассмотрим численный пример расчета стержневой системы по МКЭ, расчетная схема которой приведена на рис.1.15. Рама состоит из двух стержней, изготовленных из стали. Сечения стержней одинаковы и представляют собой прямоугольник размерами 0,2 х 0,4 м (по оси Z – 0,2 м, а по оси Y – 0,4 м). Модуль упругости стали Е=2,1*108кН/м2; Момент инерции сечения в плоскости изгиба (относительно оси Z)
 м4; площадь сечения F=0,2*0,4=0,08 м2.
м4; площадь сечения F=0,2*0,4=0,08 м2.
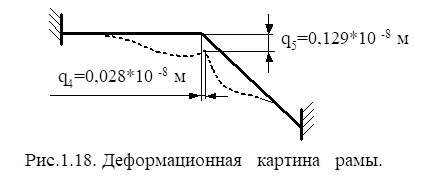
На горизонтально расположенный стержень действуют: распределенная поперечная нагрузка интенсивностью m; распределенная продольная нагрузка интенсивностью n; сосредоточенная сила F2 и сосредоточенный момент М3. Сосредоточенные сила и момент приложены в одной точке, расположенной на расстоянии 0,3 м от начала стержня. В узле соединения стержней приложены сосредоточенные сила F1 и момент М2. Посередине наклонного стержня действует сосредоточенный момент М1.
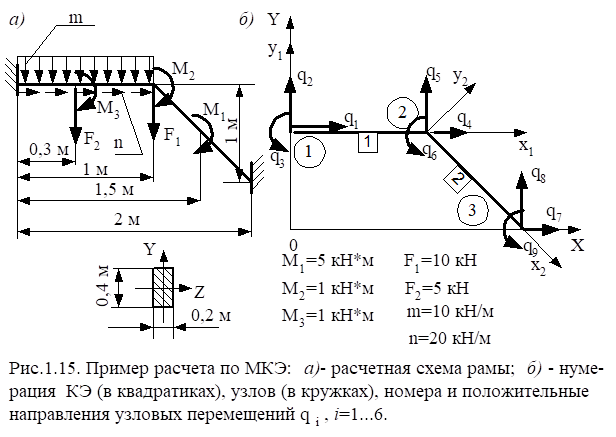
В соответствии с общим порядком расчета конструкций по МКЭ, разбиваем раму на два конечных элемента, производим нумерацию узлов и конечных элементов (рис.1.15,б). Нумерация и положительные направления перемещений узлов рамы (рис.1.15,б) соответствуют принятым при выводе матрицы жесткости стержня с шестью степенями свободы выражение (1.53).
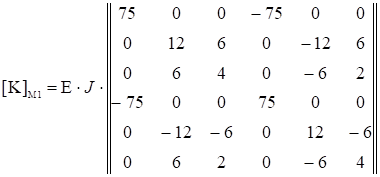
По выражению (1.53) рассчитываем матрицы жесткости [K]M1 первого и [K]M2 второго конечных элементов в местных системах координат (X1Y1 - для первого КЭ и X2Y2 - для второго) при этом общий множитель  выносим за матрицы:
выносим за матрицы:
| 1 2 3 4 5 6
4 5 6 7 8 9 |

 № перемещений
№ перемещений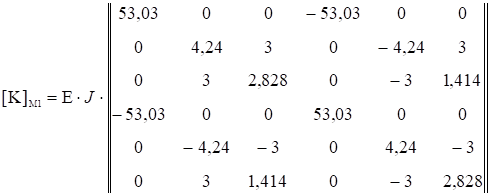

Местная система координат X1Y1 первого конечного элемента совпадает с общей (глобальной) системой координат XY (рис.1.15). В связи с этим матрица направляющих косинусов [T]1=1, а матрица жесткости этого конечного элемента как в местной , так и в общей системе координат одинакова:
[K]о1=[T]1Т*[K]м1*[T]1=1*[K]м1*1=[K]м1.
Местная система координат X2Y2 второго конечного элемента не совпадает с глобальной системой координат (расположена под углом к оси Х (рис. 1.15)). Поэтому полученную матрицу [К]м2 нужно привести к общей системе координат.
Направляющие косинусы для второго конечного элемента равны (1.60):


где X2, Y2, X3, Y3 – координаты узлов 2 и 3 второго конечного элемента;
l2 – длина этого элемента.
Матрица направляющих косинусов [T]2 , в соответствии с (1.58) и (1.59), имеет вид:
 .
.
Транспонированная матрица направляющих косинусов, полученная путем замены столбцов строками
 .
.
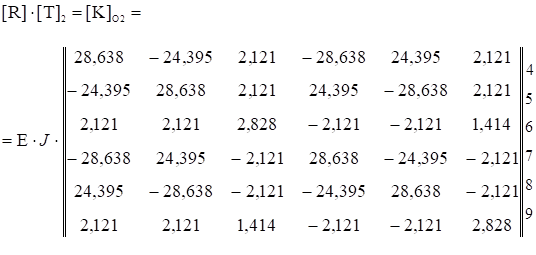
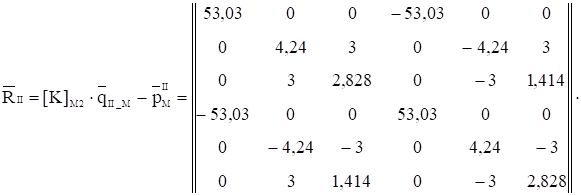
Далее необходимо выполнить матричную операцию приведения матрицы жесткости второго КЭ к общей системе координат:

где  - матрица жесткости второго КЭ в общей системе координат.
- матрица жесткости второго КЭ в общей системе координат.
Следует отметить, что матрицы переместительному закону не подчиняются – при перемножении их нельзя менять местами – нужно перемножать матрицы в том порядке, в котором они записаны.
Перемножая  получаем
получаем
 .
.
Перемножим 
|
4 5 6 7 8 9 перемещений |
После вычисления матриц [К]О1 и [К]О2 необходимо сформировать общую матрицу жесткости рассматриваемой системы. Без учета связей, наложенных на раму, общая матрица жесткости [Со] имеет размерность 9 х 9 (по числу узловых перемещений). В соответствии с методикой, изложенной в подразделе 1.2.6., формируем матрицу [Со], ориентируясь на номера узловых перемещений - помещаем элементы матриц [К]О1 и [К]О2 в матрицу [Со] (рис.1.16). Положение элементов матриц жесткости отдельных конечных элементов в общей матрице жесткости рассчитываемой системы определяется номерами узловых перемещений по горизонтали и вертикали. Например, элемент k32, расположенный в третьей строке и втором столбце матрицы жесткости [К]О1 первого КЭ, помещается в третью строку и второй столбец общей матрицы жесткости [Со]. На рисунке 1.16. области матрицы [Со], в которые попадают элементы матриц [К]О1 и [К]О2 , выделены более жирными линиями. Как видно из рисунка, в области матрицы [Со] с номерами 4, 5, и 6 строк и столбцов, соответствующих перемещениям второго узла (общего для обоих КЭ), происходит наложение матриц первого и второго конечных элементов друг на друга. Элементы указанных матриц в этой области складываются.
Следующей процедурой МКЭ является учет связей , наложенных на систему. Узлы 1 и 3 рамы жестко защемлены. Следовательно, перемещения 1, 2, 3, 7, 8 и 9 (рис.1.15) отсутствуют.
Учет условий закрепления конструкции, как отмечалось ранее, производится вычеркиванием строк и столбцов матрицы [Со], соответствующих перемещениям, запрещенными связями. Таким образом, нужно вычеркнуть строки и столбцы общей матрицы жесткости с номерами 1, 2, 3, 7, 8 и 9. На рисунке 1.16 показаны вычеркнутые строки и столбцы.
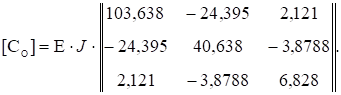
После вычеркивания указанных строк и столбцов общая матрица жесткости «сжимается».
С учетом условий закрепления, матрица [Со] примет вид:
Как отмечалось, первый конечный элемент загружен вертикальными распределенной нагрузкой интенсивностью m, сосредоточенной силой F2, продольной распределенной нагрузкой интенсивностью n, сосредоточенным моментом М3, которые действуют внутри КЭ. Эти нагрузки приводятся к узловым по формулам (1.63):
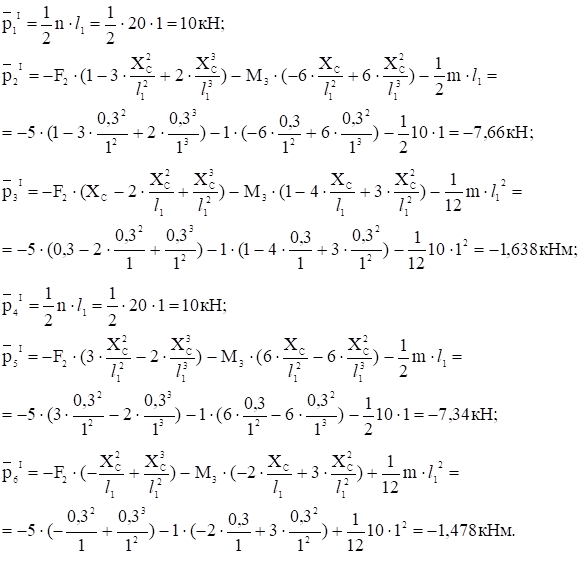
Таким образом, грузовой вектор первого конечного элемента:
 .
.
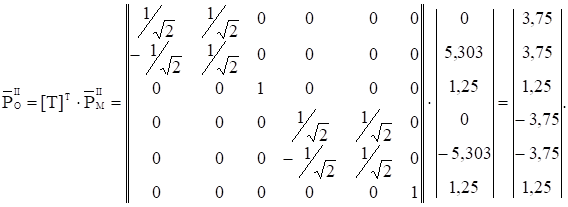
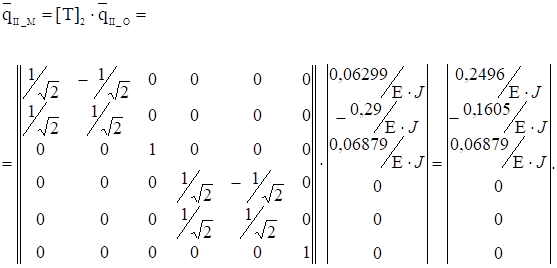
Определим элементы грузового вектора второго конечного элемента, загруженного сосредоточенным моментом М1 (рис.1.15).
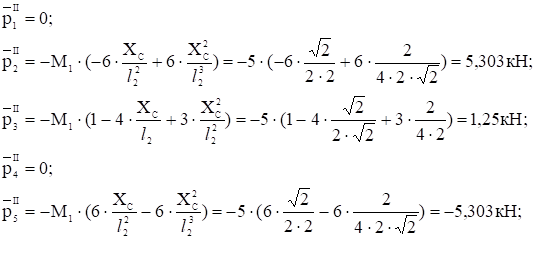

Грузовой вектор второго конечного элемента получен в местной системе координат х2y2 , расположенной под углом 45о к общей системе координат XY.
 .
.
Этот вектор необходимо привести к общей системе координат.
Как отмечалось выше, местные оси координат первого конечного элемента х1y1 совпадают с глобальной системой координат XY. В связи с этим [T]1=1 и 
Кроме нагрузки, приложенной внутри конечных элементов, во втором узле приложена вертикальная сосредоточенная сила F1 по направлению перемещения q5 и сосредоточенный момент М2 по направлению перемещения q6. При формировании общего грузового вектора для системы в целом, эти нагрузки суммируются с приведенной узловой нагрузкой, действующей по соответствующим направлениям перемещений. Правило знаков в этом случае следующее: если направление действия усилия и положительного направления перемещения совпадают, то нагрузка записывается с знаком плюс, а если не совпадает – то с знаком минус.
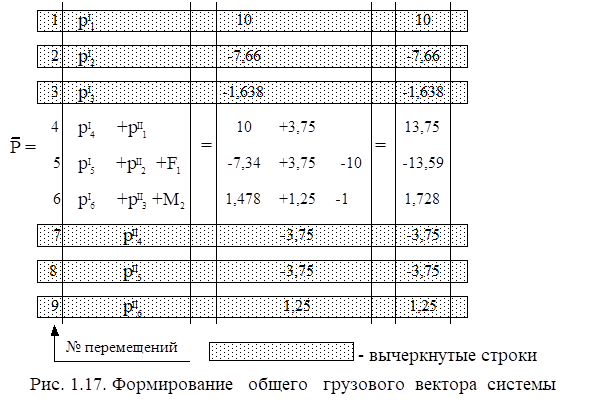
Как и при формировании общей матрицы жесткости, формирование грузового вектора системы производится в соответствии с номерами перемещений. На рис.1.17 приведены процедуры формирования грузового вектора и учета условий закрепления конструкции.
Учитывая условия закрепления конструкции (т.е. вычеркивая элементы вектора, соответствующие запрещенным перемещениям), получаем грузовой вектор системы

Основное уравнение МКЭ в рассматриваемой задаче имеет вид:
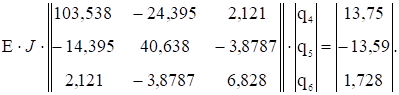
Записывая это уравнение в обычном виде, получаем систему алгебраических уравнений:

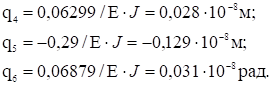
решением которых являются следующие значения перемещений:
Деформационная картина рамы имеет вид, приведенный на рис.1.18.
Следующей операцией алгоритма расчета конструкции по МКЭ является формирование векторов узловых перемещений в общей системе координат для каждого конечного элемента. С учетом найденных выше узловых перемещений и условий закрепления
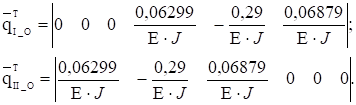
Для расчета вектора узловых усилий, вектор  необходимо привести к местной системе координат x2y2. Вектор
необходимо привести к местной системе координат x2y2. Вектор  , так как оси XY и x1y1 совпадают. Вектор узловых усилий второго конечного элемента в местной системе координат:
, так как оси XY и x1y1 совпадают. Вектор узловых усилий второго конечного элемента в местной системе координат:
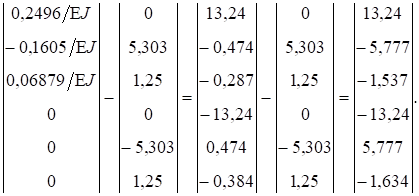
Вектор узловых усилий первого конечного элемента, в соответствии с матричным выражением (1.27):
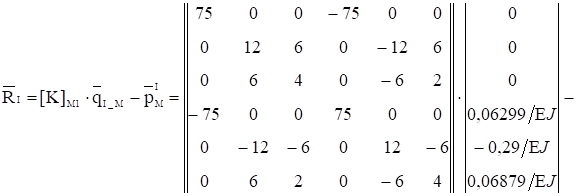
Таким образом, реакции в первом узле равны: 
Во втором узле первого конечного элемента: 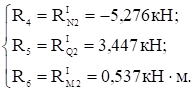
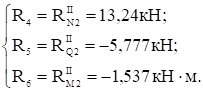
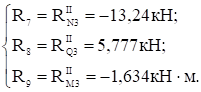
Определим узловые усилия для второго КЭ:
| Узловые усилия второго КЭ: а) узел №2 | |
| б) узел №3 | |
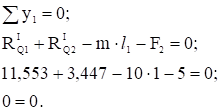
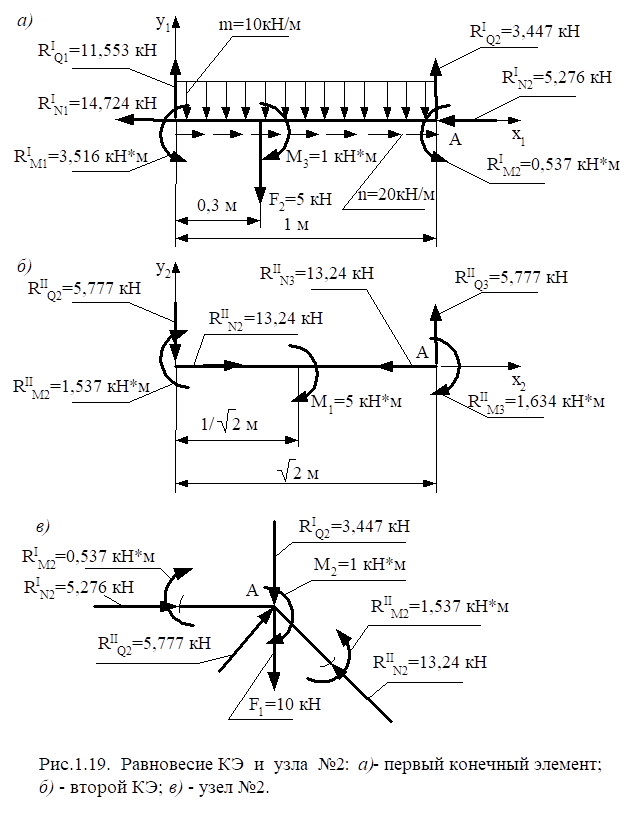
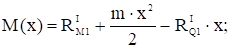
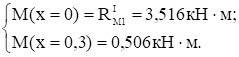
В качестве проверки рассмотрим равновесие конечных элементов и узла №2 (рис.1.19). В приведенных ниже выражениях:  сумма всех сил на ось хi равна нулю;
сумма всех сил на ось хi равна нулю;  сумма всех сил на ось yi равна нулю;
сумма всех сил на ось yi равна нулю;  сумма моментов относительно точки “А” (рис.1.19) равна нулю.
сумма моментов относительно точки “А” (рис.1.19) равна нулю.
Первый конечный элемент:

Второй конечный элемент:


Узел №2:

Таким образом, конечные элементы и узлы расчетной схемы находятся в равновесии, что свидетельствует о правильности полученного решения.
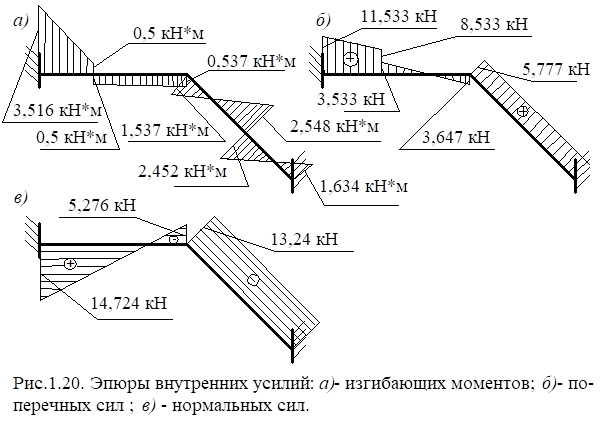
Далее построим эпюры внутренних усилий – изгибающих моментов М, поперечных Q и нормальных сил N.
Первый конечный элемент (эпюра М):
| а) участок длиной 0,3 м (рис.1.19)
|
|
| б) участок длиной 0,7 м |
|
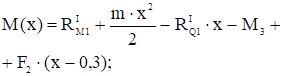
В приведенных выше выражениях х – расстояние от узла №1 до рассматриваемого сечения первого КЭ.
Второй конечный элемент (эпюра М):
| а) участок до момента М1(рис.1.19)
|
|
| б) участок после момента М1
|
|



В приведенных выше выражениях х – расстояние от узла №2 до рассматриваемого сечения второго КЭ.
Первый конечный элемент (эпюра Q):
| а) участок длиной 0,3 м (рис.1.19)
|
|
| б) участок длиной 0,7 м |
|


В приведенных выше выражениях х – расстояние от узла №1 до рассматриваемого сечения первого КЭ.
Второй конечный элемент (эпюра Q): 
Первый конечный элемент (эпюра N):
|
х – расстояние от узла №1 до рассматриваемого сечения первого КЭ. |
|

Второй конечный элемент (эпюра N): 
Эпюры внутренних усилий приведены на рис.1.20.
Результаты расчета конструкции по МКЭ полностью совпадают с результатами расчетов по методу сил и методу перемещений. Для стержневых систем МКЭ является точным методом, так как матрица жесткости КЭ получена на основании функций форм, являющихся решением дифференциальных уравнений изгиба и растяжения-сжатия стержня.
Заключительным этапом расчета является определение напряжений в наиболее нагруженных сечениях рамы.
Анализ эпюр внутренних усилий показывает, что наиболее нагруженными сечениями в рассматриваемой конструкции являются:
- сечение первого КЭ, расположенное у левой заделки (узел №1 рис.1.16);
- сечение второго КЭ, расположенное в месте действия момента М1.
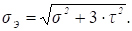
Нормальные напряжения в наиболее удаленных волокнах сечений рамы с учетом деформаций изгиба и растяжения-сжатия
где М – изгибающий момент в рассматриваемом сечении; знак  зависит от вида деформации волокон сечения. Для растянутых волокон – знак плюс, а для сжатых – минус;
зависит от вида деформации волокон сечения. Для растянутых волокон – знак плюс, а для сжатых – минус;
W – момент сопротивления сечения.  где h – расстояние от центра тяжести сечения до наиболее удаленных волокон. В рассматриваемом случае
где h – расстояние от центра тяжести сечения до наиболее удаленных волокон. В рассматриваемом случае 
N – нормальное усилие в рассматриваемом сечении. Правило знаков аналогично указанному выше;
F – площадь сечения, м2.
Касательные напряжения при сдвиге от действия поперечных сил  где Q – поперечная сила в рассматриваемом сечении.
где Q – поперечная сила в рассматриваемом сечении.
Эквивалентные напряжения, рассчитываемые по энергетической теории прочности
Для сечения, расположенного у левой заделки (верхние волокна)

Касательные напряжения в этом сечении

а эквивалентные 
Люди также интересуются этой лекцией: 31 Радиопротекторы и средства, способствующие выведению радионуклеидов из организма.
Нормальные напряжения в сечении, расположенного во втором КЭ в месте действия момента М1

Касательные напряжения в этом сечении

а эквивалентные 
При расчетах по допускаемым напряжениям полученные значения напряжений сопоставляются с допускаемыми по нормам проектирования.
Рекомендуемые лекции
- Главные лимфатические протоки
- Разработка и создание новых услуг
- 9.7 Искусство эпохи Возрождения
- 15 Химико-токсикологический анализ веществ, изолируемых из объекта настаиванием с водой, с последующим диализом а также требующих или нетребующих особых методов изолирования
- 31 Радиопротекторы и средства, способствующие выведению радионуклеидов из организма



















