
Приведение масс
Лекция 4.
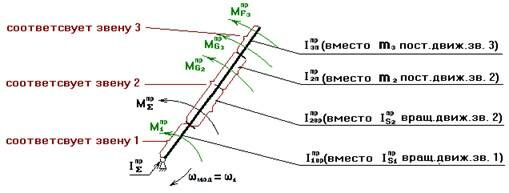 |

Приведение масс основано на равенстве кинетических энергий реальных звеньев и звена приведения одномассовой модели.
Если требуется определить какую-либо составляющую  , например
, например  , то записывают равенство:
, то записывают равенство:

2.4.2 Приведение сил.
Рекомендуемые материалы
АΣ – работа суммарного приведенного момента на его возможное перемещение.
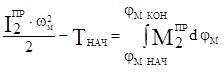
Т – Тнач = АΣ
 (1)
(1)
Приведение сил основано на равенстве секундных работ (мощностей) реальных сил и моментов, приложенных к звеньям механизма, на их возможных перемещениях и суммарного приведенного момента, приложенного к звену приведения, на его возможное перемещение.




передат передаточ
функция отношение

Вместо силы  – момент
– момент  .
.
Если необходимо определить какую-либо составляющую суммарного приведенного момента, например  , то необходимо записать равенство:
, то необходимо записать равенство:
§2.5 Вывод формулы для определения закона движения звена приведения в форме кинетической энергии (определение ωм).
из выражения (1) получаем, что wм равна
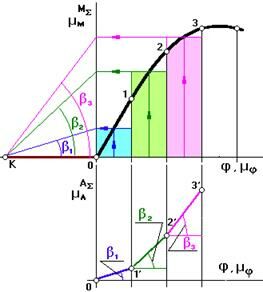
2.5.1 Определение АΣ(графический метод).
Для определения АΣ необходимо построить график  .
.
 определяется по вышеприведенным зависимостям.
определяется по вышеприведенным зависимостям.
График АΣ строится методом графического интегрирования
Суть метода: на продолжении оси абсцисс слева выбирается произвольный отрезок интегрирования ОК, чем он длиннее, тем более пологим будет график АΣ . Затем площадь под кривой М(φ1) на каждой итерации заменяется площадью равновеликого прямоугольника.

2.5.2 Определение закона движения звена приведения в дифференциальной форме (определение e звена приведения).
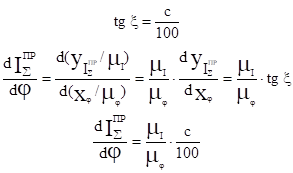
Чтобы избавиться от интеграла в (1), продифференцируем (1) по обобщенной координате φм, получим
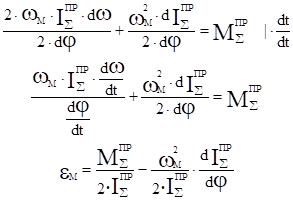
(3)
 2.5.3 Определение
2.5.3 Определение  графическим методом .
графическим методом .
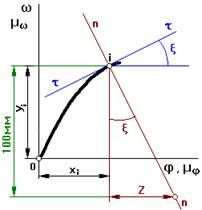
Строим график .
const var
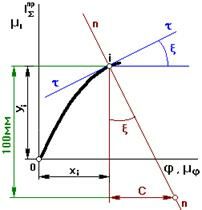
В соответствии с определением производной проведем касательную к кривой в точке i и определим тангенс угла наклона этой касательной. Для этого проведем нормаль через точку i. Тогда
2.5.4 Определение eмодели по известному графику wм=f(φ1).
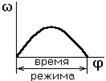
§2.6 Режимы работы машинного агрегата.


а) разгон б) торможение (выбег)
 |  | ||
в) безударный останов г)
рис. 2.6
а),б),в) – неустановившийся режим;
г) – установившийся режим.
2.6.1 Определение законов движения звена приведения одномассовой динамической модели при неустановившемся режиме работы машинного агрегата.
Угловая скорость определяется по (2).
Угловое ускорение определяется по (3).
Время режима определяется по формуле:

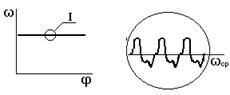
2.6.2 Определение законов движения для установившегося режима работы .
Отклонения угловой скорости от среднего уровня характеризуется коэффициентом неравномерности d
Коэффициент d определяется экспериментально и для различных машин имеет значения:
 машины ударного действия (прессы, молоты)
машины ударного действия (прессы, молоты)
 полиграфические машины (насосы)
полиграфические машины (насосы)
 электрогенераторы переменного тока
электрогенераторы переменного тока
 электрогенераторы постоянного тока
электрогенераторы постоянного тока
ЛЕКЦИЯ 5.
Для определения угловой скорости
,
где 
const var
Для того чтобы удерживать колебания угловой скорости wм в заданных пределах, определяемых коэффициентом неравномерности d, первая группа звеньев должна иметь 
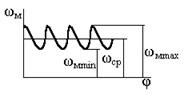
2.6.3 Вывод формулы для определения .
Изменение wм от wм_max до wм_min приводит к изменению кинетической энергии первой группы звеньев (ΔТI), которое равно:
 (2)
(2)
При установившемся режиме работы при определении wм формулу (1) напрямую использовать нельзя, т.к. неизвестно Тнач, поэтому задачу решают, используя метод Мерцалова (см. учебник).
§2.7 Определение реакций в кинематических парах рычажных механизмов без учета трения.
Данная задача может быть решена:
1. аналитическим способом;
2. графическим способом (см.ДЗ №2).
Аналитический способ:
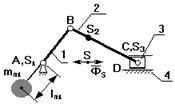
 Изобразим схему кривошипно-ползунного механизма.
Изобразим схему кривошипно-ползунного механизма.
Дано:
F3, G1, ФS1, MФ1, G2,
ФS2, МФ2, G3, ФS3,
wi, ei, vi, ai.
Определить:
М1 и Qij
Задачу начинают решать с того звена, к которому приложена известная сила или момент. Кроме того, введем понятие входной шарнир (проекции реакции Q на оси х и у положительны) и выходной шарнир (проекции реакции Q на оси - отрицательны).
Расстояние от входного шарнира до центра масс звена – р, а расстояние от выходного шарнира до центра масс звена – q.
Звено 1
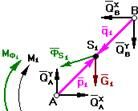
Шарнир А - входной
Шарнир В - выходной
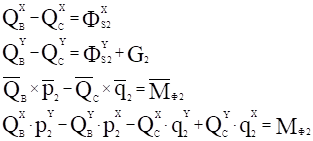
Звено 2
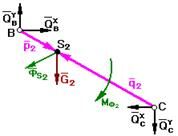
Шарнир В - входной
Шарнир С - выходной
 |
Звено 3
При решении задачи используется принцип Даламбера
3 звено:
2 звено:
1 звено:
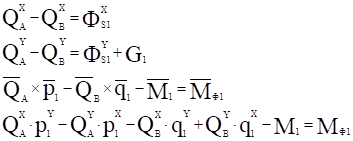
Составим систему уравнений в матричной форме:
| неизвестные | QAx | QAy | QBx | QBy | QCx | QCy | Q34 | M1 | ||||||
| F3+ФS3 | = | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | х | QAx | |||
| G3 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | QAy | |||||
| ФS2x | 0 | 0 | 1 | 0 | -1 | 0 | 0 | 0 | QBx | |||||
| ФS2y+G2 | 0 | 0 | 0 | 1 | 0 | -1 | 0 | 0 | QBy | |||||
| MФ2 | 0 | 0 | p2y | -p2x | -q2y | q2x | 0 | 0 | QCx | |||||
| ФS1x | 1 | 0 | -1 | 0 | 0 | 0 | 0 | 0 | QCy | |||||
| ФS2y+G2 | 0 | 1 | 0 | -1 | 0 | 0 | 0 | 0 | Q34 | |||||
| MФ1 | p1y | -p1x | -q1y | q1x | 0 | 0 | 0 | -1 | M1 | |||||
b A x
Эта система решается методом Гаусса.
§2.8 Учет трения при определении реакций в кинематических парах.
Трение является сложным физико-химическим процессом, сопровождающийся выделением тепла. Это вызвано тем, что перемещающиеся тела оказывают сопротивление относительному движению. Мерой интенсивности сопротивления относительному перемещению является сила (момент) трения.
Различают трение качения, трение скольжения, а также сухое, граничное и жидкостное трение.
Если суммарная высота микронеровностей взаимодействующих поверхностей:
· больше, чем высота слоя смазки, то - сухое трение.
· равна высоте слоя смазки, то - граничное трение.
· меньше, чем высота слоя смазки, то - жидкостное .
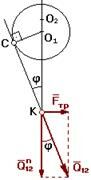
2.8.1 Учет трения в поступательной кинематической паре.
 Без учета трения реакция направлена по нормали к взаимодействующим поверхностям. При учете трения результирующая реакция Q21 отклоняется от общей нормали на угол трения j в сторону противоположную направлению движения.
Без учета трения реакция направлена по нормали к взаимодействующим поверхностям. При учете трения результирующая реакция Q21 отклоняется от общей нормали на угол трения j в сторону противоположную направлению движения.
без учета трения с учетом трения

 Fтр=Qn12.tg j
Fтр=Qn12.tg j
tg j= f
Fтр=Qn12.f
Коэффициент трения f определяется экспериментально и зависит от многих факторов.
2.8.2 Учет трения во вращательной кинематической паре.
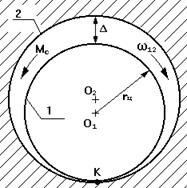
1 - цапфа
rц - радиус цапфы
Δ - зазор
r - радус круга трения;
r = О1С
Из ΔО1СК à = sin j à О1С = О1К sin j
= sin j à О1С = О1К sin j
Mc= Q12.О1С = Q12. rц.sin j
При малых углах j sin j ≈ tg j = f . Тогда :
Mc= Q12. rц.f
При учете трения во вращательной КП результирующая реакция отклоняется от общей нормали на угол трения j и проходит касательно к кругу трения радиуса r
ЛЕКЦИЯ 6.
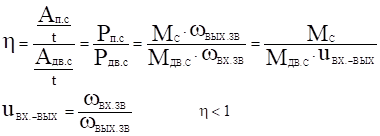
2.8.3 Краткие сведения по определению КПД (h) машинного агрегата.
 КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.
КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.
 |
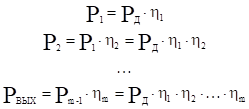
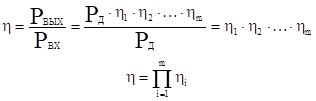
а) определение КПД при последовательном соединении механизмов.
Pвход = Рд
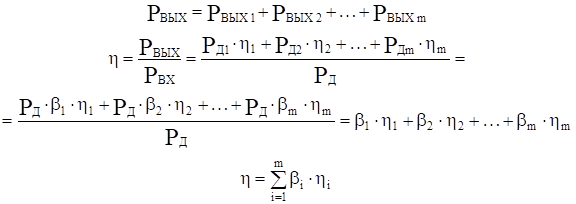
б) определение КПД при параллельном соединении механизмов.
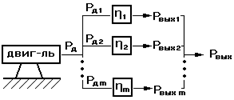 |

где bi – коэффициенты распределения мощности.
b1 + b2 + b3 +… + bm = 1
Каждый b определяется назначением специалиста.
Глава3. Основные сведения о виброзащите машинного агрегата.
Вибрации нашли полезные применения в технике. Примерами этого являются различные вибромассажеры, вибротранспортеры и т.д. Однако работа с инструментом, основанном на вибрации, приводит к профессиональным травмам и заболеваниям. Основные мероприятия, связанные с выявлением источника вибрации, с целью последующего снижения его виброактивности или полного его устранения, называют виброзащитой.
Виброзащита осуществляется по следующим основным направлениям:
1. Уменьшение активности источника с помощью статического уравновешивания механизмов (полного или частичного), а также уравновешивания роторов.
2. Изменение конструкции объекта: установка гасителей колебаний, демпферов, виброизоляторов.
§3.1 Статическое уравновешивание рычажных механизмов.
 Если
Если  , то такой механизм называется статически уравновешенным.
, то такой механизм называется статически уравновешенным.
Если  , то такой механизм называется моментно-уравновешенным.
, то такой механизм называется моментно-уравновешенным.
Рассмотрим случай, когда необходимо уравновесить статически,
т.е. . Этого можно добиться только тогда, когда  , т.к.
, т.к.
 S à A
S à A
Когда центр масс совмещен с А, то он становиться неподвижным. Этого добиваются с помощью двух противовесов, один из которых устанавливается на продолжении шатуна, а другой на продолжении кривошипа.
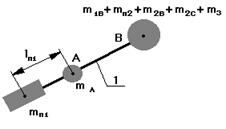
Для того чтобы рассчитать массы противовесов, применяют метод замещающих масс, суть которого заключается в том, что масса каждого звена условно разноситься по двум точкам. При этом должны выполняться следующие условия:
 разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
m = mA + mB
lAB = lAS + lBS
mA lAS = mB lBS
Сосредоточим массу 3-го звена в т.С
 Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
mпр2.lпр2 = (m2C + m3C).lBC
При этом либо задаются массой противовеса и определяют lпр2, либо задаются lпр2 и определяют массу противовеса.
mпр1.lпр1 = (m1B + mпр2+ m2В+ m2C+ m3C).lAB
 |
После всех указанных мероприятий, центр масс переместиться в точку А, однако невсегда конструктивно возможно установить противовес на продолжении шатуна и ограничиваются установкой противовеса на звене 1. В этом случае центр масс системы смещают на линию АС, и этот центр масс перемещается с постоянным ускорением: а = const
В этом случае механизм – частично статически уравновешанный, его нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создает опрокидывающий момент, что недопустимо.
 В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
§3.2 Балансировка ротора (лаб. раб. №9).
Ротор – тело любой геометрической формы, имеющее свое основное движение – движение вращения (коленвал, колесо турбины и т.д.).
Пусть в силу каких-либо причин центр масс ротора смещен от оси вращения О на постоянную величину е.
1. w=0 à на опоры действует только сила тяжести G=mg.
2. w=соnst

 1) 2)
1) 2)
 Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Из рассмотрения данного треугольника следует, что при вращении ротора на его опоре возникает знакопеременная нагрузка Q12, которая достигает максимума, когда ФS и G направлены вниз, и минимума, когда эти вектора направлены по вертикали в разные стороны.
Состояние ротора , характеризующегося таким распределением масс, при котором на его опорах возникает знакопеременная нагрузка, называется неуравновешанностью ротора.
Причины вызывающие неуравновешанность ротора:
1. неточность изготовления ротора;
2. неточность сборки;
3. различные включения при отливке частей ротора;
4. перепады температур.
Мерой неуравновешенностью ротора является дисбаланс ( ) – вектор, направленный по ФS и отличающийся от него в w2 раз:
) – вектор, направленный по ФS и отличающийся от него в w2 раз:

 ,[г.мм]
,[г.мм]
Вам также может быть полезна лекция "21 Характеристика предшественников полевых культур".
Для того чтобы определить величину и направление D, в рассмотрение вводят плоскость дисбаланса, в которой этот вектор расположен, и угол дисбаланса.
Мероприятие, связанное с определением величины и направления D, с целью его последующего уменьшения, называется уравновешиванием ротора.
Существуют 3 вида неуравновешанности:
1. статическая;
2. моментная;
3. динамическая (общий случай).

















