
Временные характеристики систем
7. Временные характеристики систем. Качество переходного процесса. Типовые переходные процессы. Переходные характеристики систем.
Временные характеристики систем.
Временная характеристика системы представляет собой изменение выходной величины во времени при подаче на ее вход типового апериодического воздействия. В качестве последнего используют единичное ступенчатое воздействие, или единичный импульс. При единичном ступенчатом воздействии (рис. 1-5, а) входная величина мгновенно возрастает от нуля до единицы и далее остается неизменной. Единичное ступенчатое воздействие, или единичная ступенчатая функция 1(t) описывается выражением:
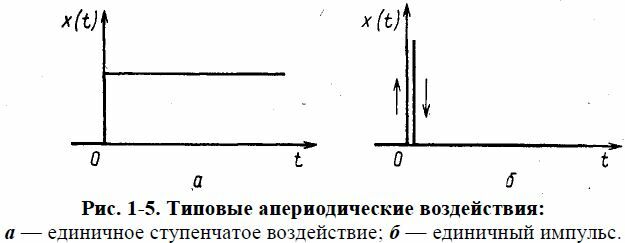
Импульс, величина которого равна бесконечности, длительность — нулю, а площадь — единице (рис. 1-5,б) называется единичным импульсом. Его аналитическое выражение называют единичной импульсной функцией, или дельта-функцией, и обозначают через δ(t).
Дельта-функцию при условии, что  записывают так:
записывают так:
Переходная характеристика — это частный случай временной характеристики при подаче на вход элемента или системы единичного ступенчатого возмущения. Ее обозначают через h(t). Таким образом, если xвх(t)=1(t), то xвых(t)=h(t).
Рекомендуемые материалы
Импульсная переходная характеристика — это временная характеристика при подаче на вход элемента или системы единичного импульса. Ее аналитическим выражением является импульсная переходная функция, или весовая функция (функция веса) w(t). Следовательно, xвых(t)= w(t) при xвх(t)= δ(t). Между переходной и весовой функциями линейных звеньев наблюдается зависимость, аналогичная вышеприведенной:
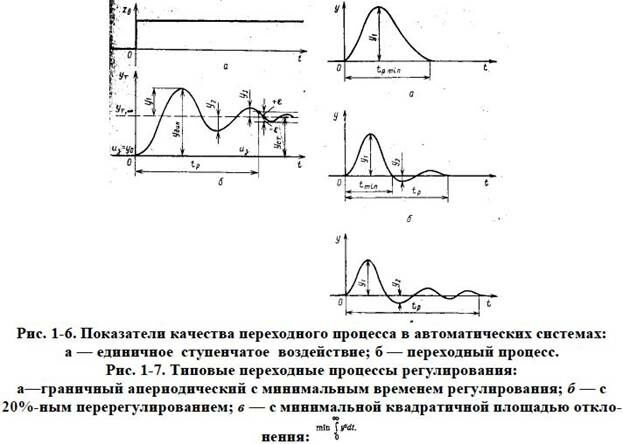
Качество переходного процесса определяется по показателям, которые характеризуют отклонение реального процесса от желаемого; они показывают насколько точно и как быстро после нанесения единичного ступенчатого воздействия (при нулевых начальных условиях) в системе устанавливается равновесное состояние. Качество переходного процесса количественно оценивается следующими показателями (рис. 1-6).
Статическая ошибка регулирования уст есть рассогласование между установившимся значением регулируемой величины после переходного процесса и ее заданным значением

или в относительных единицах

Динамическая ошибка регулирования yдин есть максимальное отклонение регулируемой величины в переходном процессе от ее заданного значения

или в относительных величинах

Время регулирования tp есть отрезок, в течение которого регулируемая величина достигает нового установившегося значения с некоторой заранее установленной точностью ±ε.
Перерегулирование представляет собой максимальное отклонение регулируемой величины от установившегося значения, выраженное в процентах, от уст

При расчетах автоматических систем регулирования технологических процессов перерегулирование переходного процесса оценивают также выраженным в процентах отношением второй и первой амплитуд колебаний, направленных в противоположные стороны.
Интегральная квадратичная ошибка регулирования представляет собой квадрат площади между кривой переходного процесса и новым установившимся состоянием системы:

Чем меньше статическая и динамическая ошибки, время регулирования и т. д., тем выше качество переходного процесса.
Типовые переходные процессы. Из устойчивых переходных процессов в качестве оптимального с точки зрения требований технологии выбирают один из трех типовых процессов:
7. Планирование производства и составление графика - лекция, которая пользуется популярностью у тех, кто читал эту лекцию.
- граничный апериодический процесс с минимальным временем регулирования tp, min (рис. 1-7,а);
- процесс с 20%-ным перерегулированием (рис. 1-7,6);
- процесс с минимальной квадратичной площадью отклонения (рис. 1-7, в)
Граничный апериодический процесс характеризуется отсутствием перерегулирования, минимальным общим временем регулирования и наименьшим по сравнению с другими типовыми переходными процессами воздействием регулятора на объект (это наименьшее воздействие вызывает наибольшее отклонение регулируемой величины от заданного значения). Такой переходный процесс используется в качестве оптимального при значительном влиянии регулирующего воздействия на другие технологические величины объекта при отклонении основной регулируемой величины для того, чтобы свести их отклонение к минимуму.
Процесс с 20%-ным перерегулированием характеризуется большей величиной регулирующего воздействия, чем в предыдущем случае, и меньшим отклонением регулируемой величины; при этом время регулирования несколько возрастает. Этот процесс выбирается в качестве оптимального в случаях, когда допустимо некоторое перерегулирование.
Процесс с минимальной квадратичной площадью отклонения регулируемой величины обладает значительным (до 40%) перерегулированием, большим временем регулирования и наименьшей величиной максимального динамического отклонения регулируемой величины. Он имеет место при большей по сравнению с описанными выше процессами величине регулирующего воздействия и применяется в качестве оптимального, если величина динамического отклонения параметра должна быть минимальной.



















