Курсовая работа 55: Проектирование и исследование опорного механизма вариант А
-50%
Описание
Проектирование и исследование опорного механизма
Реферат
Расчетно-пояснительная записка к курсовому проекту «Проектирование и исследование опорного механизма шасси самолета» содержит 49 страниц машинописного текста, 30 рисунков, 9 таблиц.В расчетно-пояснительной записке проведено:
- проектирование опорного механизма шасси самолета, исследовано его движение;
- кинетостатический силовой расчет основного рычажного механизма;
- проектирование цилиндрической эвольвентной зубчатой передачи;
- проектирование двурядного планетарного механизма;
- проектирование кулачкового механизма с поступательно движущимся толкателем.
Оглавление
| 1. | Определение закона движения механизма | 8 |
| 1.1. | Постановка задачи | 8 |
| 1.2. | Синтез основного механизма | 8 |
| 1.2.1. | Исходные данные | 8 |
| 1.2.2. | Определение размеров механизма | 9 |
| 1.3. | Определение параметров динамической модели | 10 |
| 1.3.1 | Определение функций положения механизма | 11 |
| 1.3.2. | Определение первых кинематических передаточных функций | 12 |
| 1.3.2.1. | Вывод зависимости первых кинематических передаточных функций от угла | 12 |
| 1.3.2.2 | Построение первых кинематических передаточных функций механизма | 14 |
| 1.3.3. | Приведение масс | 15 |
| 1.3.4 | Приведение сил | 16 |
| 1.4. | Построение диаграмм работы | 17 |
| 1.5. | Построение диаграмм угловой скорости звена приведения | 18 |
| 1.6. | Построение диаграммы времени | 18 |
| 1.7. | Построение диаграммы углового ускорения звена 1 | 19 |
| 2. | Силовой расчет механизма | 20 |
| 2.1. | Постановка задачи | 20 |
| 2.2. | Исходные данные | 20 |
| 2.3. | Построение планов скоростей | 20 |
| 2.4. | Построение плана ускорений | 21 |
| 2.5. | Определение главных векторов и главных моментов сил инерции | 22 |
| 2.6. | Кинетостатический силовой расчет механизма графическим методом | 22 |
| 2.7. | Определение относительного расхождения | 26 |
| 3. | Проектирование цилиндрической эвольвентной зубчатой передачи и планетарного редуктора | 27 |
| 3.1. | Проектирование зубчатой передачи | 27 |
| 3.1.1. | Постановка задачи | 27 |
| 3.1.2. | Исходные данные | 27 |
| 3.1.3. | Геометрический расчет зацепления | 27 |
| 3.1.3.1 | Определение радиусов делительных окружностей | 27 |
| 3.1.3.2 | Определение радиусов основных окружностей | 27 |
| 3.1.3.3 | Определение минимальных значений коэффициента смещения | 27 |
| 3.1.3.4 | Определение узла зацепления | 28 |
| 3.1.3.5 | Определение коэффициента вспомогательного смещения | 28 |
| 3.1.3.6 | Определение коэффициента уравнительного смещения | 28 |
| 3.1.3.7 | Определение радиусов начальных окружностей | 28 |
| 3.1.3.8 | Определение межосевого расстояния | 28 |
| 3.1.3.9 | Определение радиусов окружностей вершин | 28 |
| 3.1.3.10 | Определение радиусов окружностей впадин | 29 |
| 3.1.3.11 | Определение высоты зубьев | 29 |
| 3.1.3.12 | Определение толщины зубьев пол дугами делительных окружностей | 29 |
| 3.1.3.13 | Определение угла профиля на окружностях вершин зубьев колес | 29 |
| 3.1.3.14 | Определение толщины зубьев под дугами окружностей вершинё | 29 |
| 3.1.3.15 | Определение шага по хорде делительной окружности шестерни и колеса | 29 |
| 3.1.3.16 | Определение размеров, необходимых для построения станочного зацепления | 30 |
| 3.1.4. | Выбор коэффициентов смещения | 31 |
| 3.1.5. | Результаты расчета зубчатой передачи | 32 |
| 3.1.6. | Построение схемы станочного зацепления и схемы эвольвентного зацепления | 34 |
| 3.1.6.1 | Определение радиуса граничных точек | 34 |
| 3.1.6.2 | Определение координат профиля зуба | 34 |
| 3.1.6.3 | Определение координат переходноц кривой зуба | 34 |
| 3.2. | Проектирование планетарного редуктора | 36 |
| 3.2.1. | Постановка задачи | 36 |
| 3.2.2. | Исходные данные | 36 |
| 3.2.3. | Подбор чисел зубьев | 37 |
| 3.2.3.1 | Условие соосности | 37 |
| 3.2.3.2 | Условие сборки | 38 |
| 3.2.3.3 | Условие соседства | 38 |
| 3.2.3.4 | Посторенние схемы планетарного механизма | 38 |
| 4. | Проектирование кулачкового механизма | 39 |
| 4.1. | Постановка задачи | 39 |
| 4.2. | Исходные данные | 39 |
| 4.3. | Построение диаграмм передаточных функций механизма | 39 |
| 4.3.1. | Определение значений ординат диаграмм передаточных функций и функции положения | 39 |
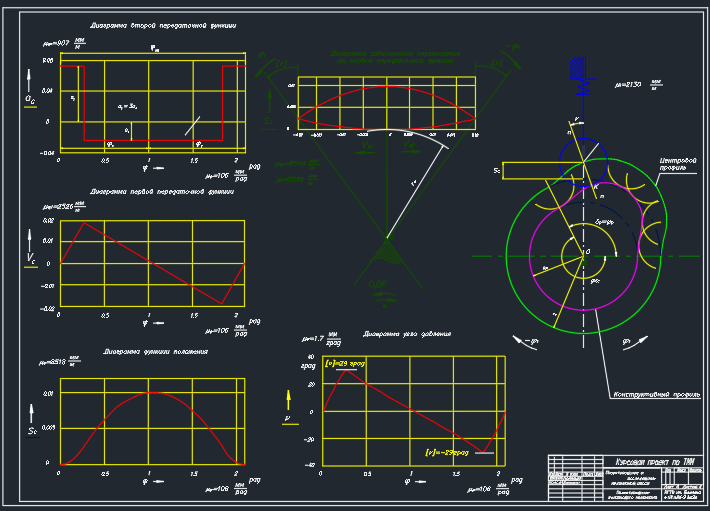
| 4.3.2. | Построение диаграммы второй передаточной функции | 40 |
| 4.3.3. | Построение диаграммы первой передаточной функции | 40 |
| 4.3.4. | Построение диаграммы функции положения | 41 |
| 4.3.5. | Построение диаграммы зависимости функции положения от первой передаточной функции | 41 |
| 4.4. | Определение основных размеров механизма | 42 |
| 4.5. | Построение центрового и конструктивного профилей кулачка | 42 |
| 4.6. | Построение диаграммы угла давления | 44 |
| Заключение | 45 | |
| Литература | 46 |
Исходные данные для проектирования
Структурная схема механизма ![]()
Опорный механизм предназначен для убирания и выпуска колес во время движения. 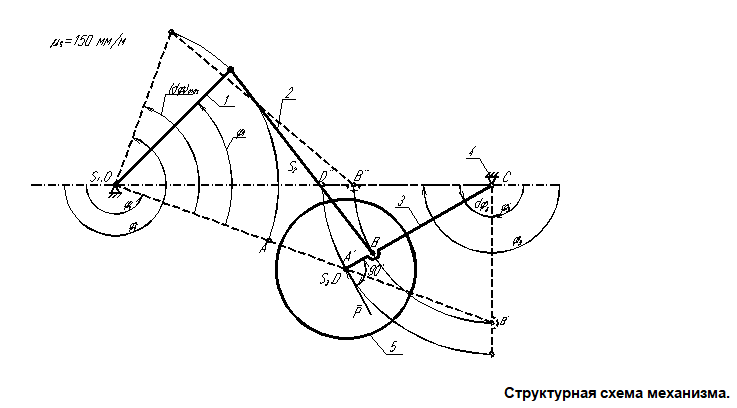
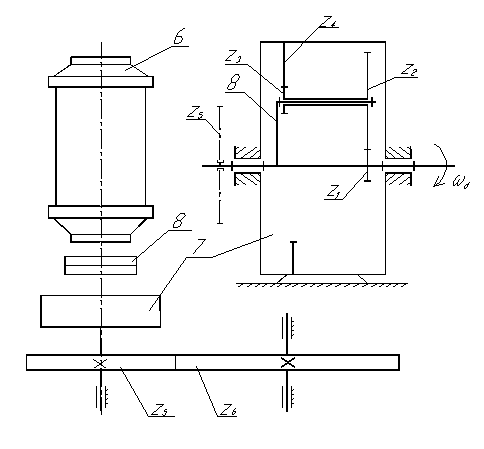
Основной механизм (1-2-3-4) является двухкоромысловым четырехзвенником с колесом 5, центр которого расположен в точке D ведомого коромысла 3. Ведущее коромысло 1 приводится в движение от электродвигателя 6 (рис. 1) при помощи планетарного редуктора 7 и зубчатой передачи . Включение электромагнитной муфты 8, соединяющей при убирании и выпуске колес электродвигатель 6 и редуктор 7, производится посредством концевых выключателей ( на схеме не показаны).
При движении на опорный механизм действуют силы сопротивления воздуха, равнодействующая P которых, приложенная к центру D колеса 5, может быть приближенно подсчитана по формуле , где — начальная сила сопротивления; — угол отклонения звена 3 от его начального положения .
В проекте рассматривается неустановившийся режим работы опорного механизма в процессе убирания колес. В этом случае сила Р способствует работе электродвигателя. Величина момента электродвигателя (Мд=const) определяется из условия безударного останова механизма ( w1 кон = 0 ). Момент сил трения в кинематических парах, приведенный к звену 1 и принятый постоянным (Мтрпр=const), и силы тяжести Gi звеньев препятствуют процессу убирания колес.
В начальном положении механизма шарниры О, А', и В' расположены на одной прямой. За время убирания колес звено 1 повернется на угол (Dj1)max=(j1''-j1'), звено 3 - на угол (j3''-j3')=90°.
Синтез основного механизма (определение размеров звеньев 1, 2, 3) производится по двум положениям ведущего 1 и ведомого 3 звеньев, что является частным случаем синтеза шарнирного четырехзвенника по трем положениям этих же звеньев.
При проектировании сначала определяются размеры звена 3 (lBC и lDC) по известным lOC, углу j1', u lDC/lBC . Размеры звеньев 1 и 2 (lОА и lАВ) находят графически методом обращенного движения, сообщая всей системе вращение вокруг оси О с угловой скоростью (-w1) (рис. 1.1в). Точка А' звеньев 1 и 2 является центром окружности, проходящей через точки B' u B'', и лежит на пересечении перпендикуляра к середине хорды B'B'' с прямой ОВ'.
Принять lАS2 = lS2В .
 В данной установке отсутствует кулачковый механизм. Проектирование кулачкового механизма провести по заданию №54.
В данной установке отсутствует кулачковый механизм. Проектирование кулачкового механизма провести по заданию №54. Скорость толкателя подсчитывается по уравнению
VB=A×60[j/dP – 3(j/dP)2+2(j/dP)3]; 0 < j < dP
| Примечания. |
|
Исходные данные
| № | Наименование параметра | Обозначение | Размерность | Числовое значение |
| 1. | Угловые координаты в начальном положении механизма: ведущего коромысла 1 ведомого коромысла 3 | | град град | 155 90 |
| 2. | Угловые координаты в конечном положении механизма: ведущего коромысла 1 ведомого коромысла 3 | | град град | 245 180 |
| 3. | Длина стойки | loc | м | 1.60 |
| 4. | Отношение длин для звена 3 | — | 1.2 | |
| 5. | Вес звеньев: Коромысла 1 Шатуна 2 Коромысла 3 с колесом 5 | | Н Н Н | 500 700 4000 |
| 6. | Начальная сила сопротивления | P0 | Н | 3000 |
| 7. | Момент сил трения в кинематических парах механизма, приведенный к звену 1 | | Н×м | 430 |
| 8. | Моменты инерции: Звена 2 Звена 3 с колесом 5 относительно оси С | | | 5 320 |
| 9. | Момент инерции вращающихся деталей (ротора, редуктора, зубчатой передачи, муфты, коромысла 1), приведенный к валу О: | | | 120 |
| 10. | Угловая координата для силового расчета: | | град | 30 |
| 11. | Числа зубьев колес | | — — | 11 18 |
| 12. | Модуль зубчатых колес | m | мм | 5 |
| 13. | Передаточное отношение планетарного редуктора | | — | 13 |
| 14. | Число сателлитов в планетарном редукторе | k | — | 3 |
| 15. | Максимальный ход толкателя кулачкового механизма | h | м | 0.01 |
| 16. | Максимально допустимый угол давления в кулачковом механизме | a*д | град | 30 |
| 17. | Угол рабочего профиля кулачка | dp | град | 120 |
| 18. | Радиус ролика | RP | м | 0.010 |
Чертежи
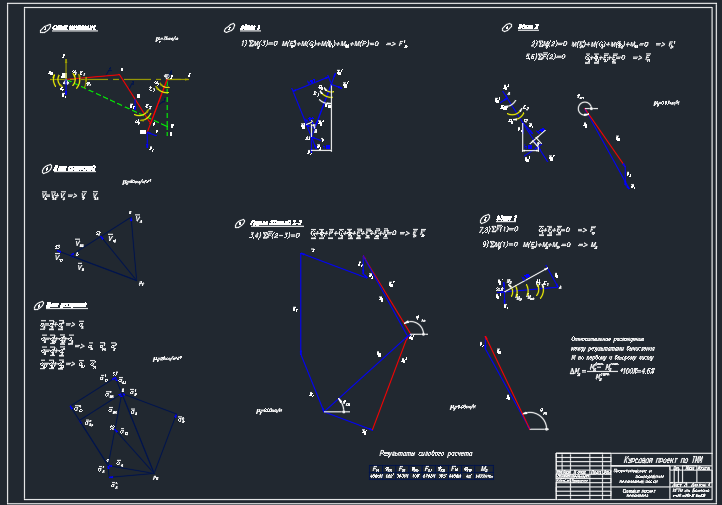
Лист 1 - Определение закона движения ![]()

Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование цилиндрической эвольвентной зубчатой передачи ![]()

Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
429
Качество
Идеальное компьютерное
Размер
2,42 Mb
Список файлов
РПЗ.xmcd
Титульный лист. Реферат. Оглавление.doc
Техническое задание.doc
Заключение. Литература.doc
Чертежи.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:15
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!


















