Курсовая работа 72: Проектирование и исследование механизмов гайковырубного автомата вариант Б
-50%
Описание
Проектирование и исследование механизмов гайковырубного автомата
Реферат
Расчетно-пояснительная записка содержит Проектирование и исследование механизмов гайковырубного автомата, определение действующих силовых факторов, исходя из закона его движения, расчет силовых факторов, действующих в кинематических парах механизма с учетом геометрии масс звеньев; расчет и исследование кулачкового механизма.Данная записка содержит 23 страницы машинописного текста,
17 рисунков, 5 таблиц.
Ключевые слова: механизм,
структура,
динамика,
силовой расчет,
кулачковый механизм.
Содержание
- Реферат.....................................................................................................2
- Техническое задание..............................................................................4
- 1. Определение закона движения механизма...................................6
- 1.1. Определение размеров звеньев механизма.....................................6
- 1.2. Нахождение передаточных функций механизма...........................7
- 1.3. Определение суммарного приведенного момента инерции механизма....…9
- 1.4. Определение суммарного приведенного момента.......................10
- 1.5. Построение графика суммарной работы..........….........................12
- 1.6. Определение угловой скорости звена приведения ......................13
- 1.7. Определение углового ускорения звена приведения…...............14
- 1.8. Определение момента инерции дополнительной маховой массы....14
- 2. Силовой расчет механизма.............................................................14
- 2.1. Цели и задачи силового расчета.....................................................14
- 2.2. Определение скоростей и ускорений звеньев и кинематических пар..14
- 2.3. Нахождение главных векторов сил и моментов инерции...........15
- 2.4. Нахождение неизвестных сил и моментов...................................16
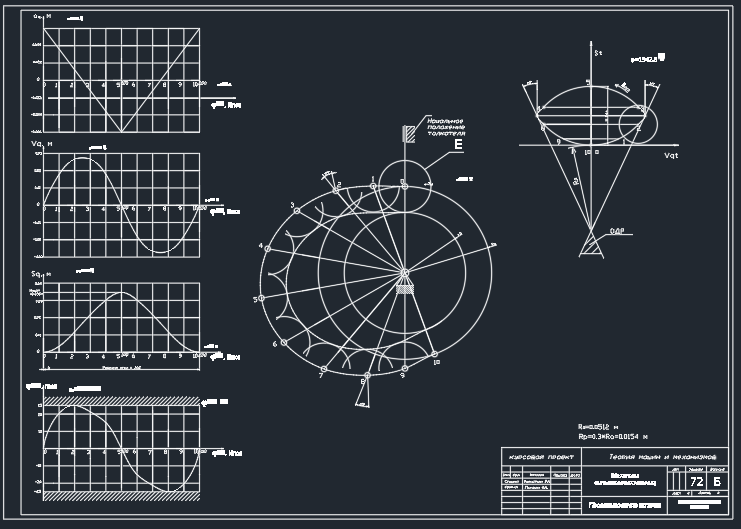
- 3. Проектирование кулачкового механизма...................................17
- 3.1. Исходные данные и основные этапы проектирования................17
- 3.2. Определение кинематических передаточных функций кулачкового механизма......17
- 3.3. Определение основных размеров кулачкового механизма.........19
- 3.4. Определение координат и построение профиля кулачка из условия ограничения угла давления….20
- 4. Проектирование цилиндрической эвольвентной зубчатой передачи и планетарногo редуктора....22
- 4.1. Цели и задачи расчета эвольвентного зацепления…………...……….22
- 4.2. Проектирование зубчатой передачи…………...……………………….…….22
- 4.3. Построение проектируемой зубчатой передачи………………….…….22
- 4.4. Проектирование планетарного редуктора …...….………………….…….22
- 4.5. Построение графика скоростей …………...…………….……………….…….22
- Заключение............................................................................................22
- Ссылки...............…….............................................................................23
Техническое задание
Автомат предназначен для изготовления гаек из полосовой стали. Движение от электродвигателя 1 через планетарный редуктор 2-в и зубчатую передачу 5-6 передается на вал 7 шестизвенного кривошипно-ползунного механизма 7-12 (ОАВСD) . Во время длинного хода Н1 ползуна 11 влево, начиная с положения механизма АIВIDI и кончая положением АIIВIIDII, с помощью пуансонов, закрепленных на ползуне 11,и матриц на ползуне ( челноке ) 13 производятся операции: 1) вырубка уголков в полосе 14, которая подается в зону штамповки с помощью механизма прерывистой (шаговой ) подачи (на схеме не показан); 2) пробивка отверстия под резьбу; 3) отрубка гаек от полосы и 4) чеканка фаски.После этого ползун 11 совершает короткий ход Н2 вправо, до положения механизма АIIIВIIIDIII , во время которого челнок 13, до этого неподвижный, перемещается вверх и выставляет на позицию штамповки калибровочную матрицу для зачистки граней гайки. Далее ползун 11 совершает короткий ход влево ( до положения механизма АIIIIВIIIIDIIII), во время которого и производится зачистка граней гайки ( калибровка ).
Графики изменения усилия Fс , действующего на ползун 11 при работе автомата, заданы. Во время длинного хода ползуна 11 назад ( вправо ) осуществляются отвод калибровочной матрицы 13 вниз и шаговая подача полосы 14. Челнок 13 с матрицами приводится в движение кулачково-рычажным механизмом 15-16-13; пружина 17 служит для возврата челнока в исходное положение.
Для обеспечения необходимой равномерности движения на кривошипном валу 7 закреплен маховик 18.
Исходные данные | ||||
| № пп | Наименование параметра | Обозначение | Размерность | Числовое значение |
| 1 | 2 | 3 | 4 | 5 |
| 1. | Число оборотов электродвигателя. | n1 | об/мин | 1440 |
| 2. | Число оборотов кривошипного вала 7. | n7 | об/мин | 120 |
| 3. | Ход ползуна 11. | Н1 Н2 | М | 0.06 0.024 |
| 4. | Максимальное усилие, приложенное к ползуну 11. | Fс max | Н | 58000 |
| 5. | Размеры звеньев. | lВС=lВD lОС | м | 0.26 0.40 |
| 6. | Вес звеньев 9, 10, 11. | G9=G10 G11 | Н | 160 550 |
| 7. | Вес звена 7 ( без маховика ) | G7 | Н | 450 |
| 8. | Ориентировочный вес единицы длины звена 8. | q | Н/м | 0.024 |
| 9. | Коэффициент неравномерности вращения вала 7. | d | __ | 1/12 |
| 10. | Момент ротора электродвигателя. | Iэд=GD^2/4 | Кг* м^2 | 0.045 |
| 11. | Приведенный к валу 7 момент инерции всего зубчатого редуктора. | Ip пр | Кг*м^2 | 1.0 |
| 12. | Момент инерции кривошипного вала 7 ( без маховика ) | I70 пр | Кг*м^2 | 0.015 |
| 13. | Угол рабочего профиля кулачка | dраб | град | 230 |
| 14. | Ход толкателя кулачкового механизма | h | м | 0.018 |
| 15. | Максимально допустимый угол давления в кулачковом механизме | aдоп | град | 25 |
| 17. | Отношение величин ускорений толкателя | a1/a2 | __ | 1,7 |
| 18. | Угол поворота кулачка, соответствующий дальнему выстою толкателя. | φвыст | град | 150 |
Чертежи
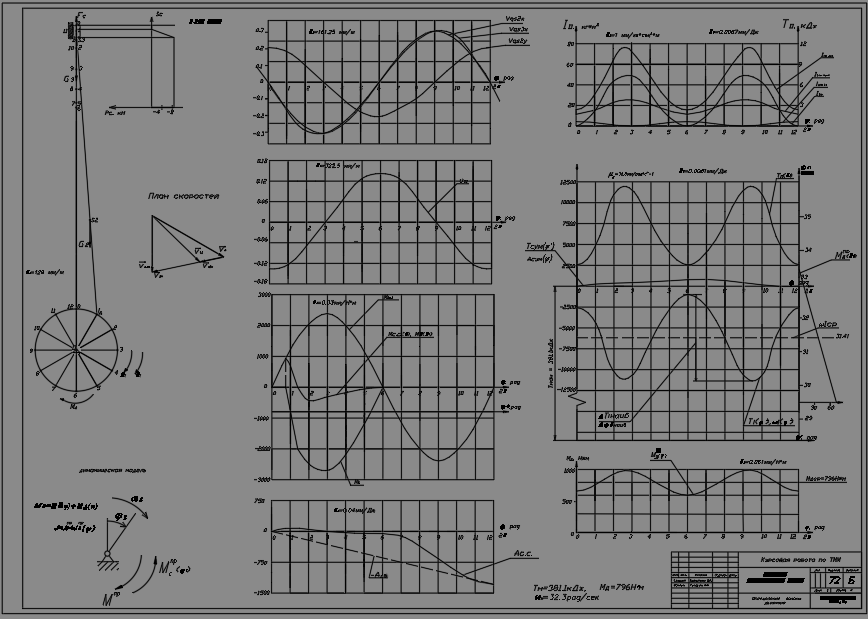
Лист 1 - Определение закона движения ![]()
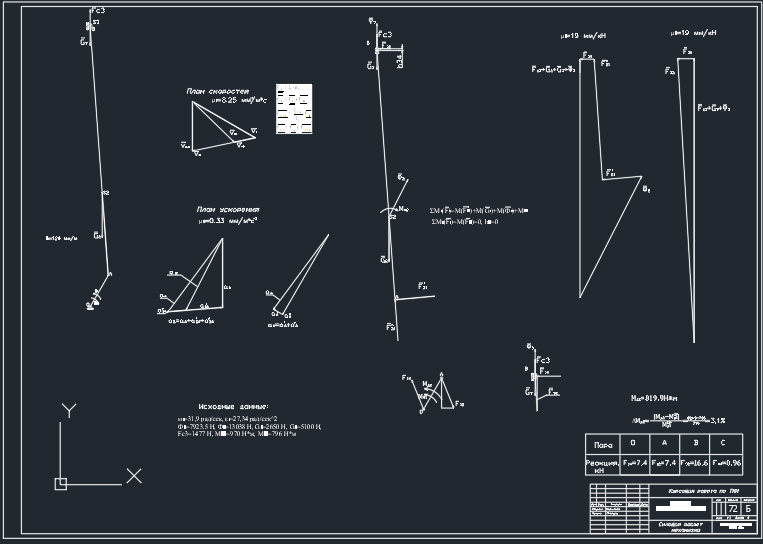
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
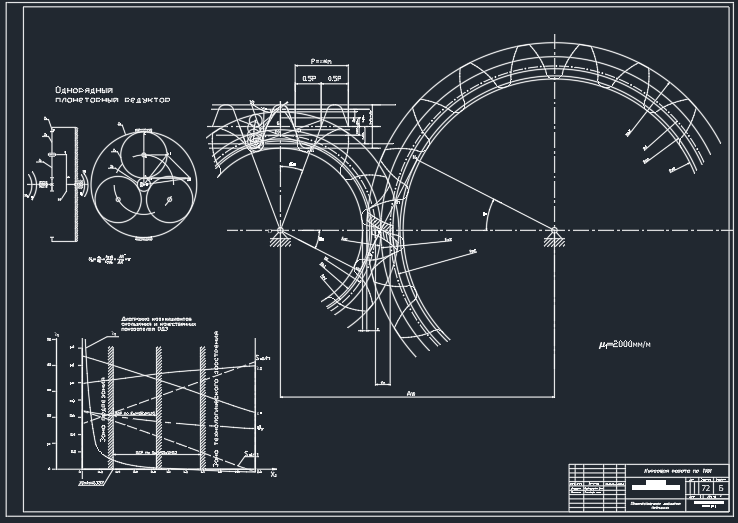
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
880
Качество
Идеальное компьютерное
Размер
2,01 Mb
Преподаватели
Список файлов
РПЗ.DOC
Расчеты.xls
Проектирование зубчатой передачи.xmcd
Лист (1).dwg
Лист (2).dwg
Лист (3).dwg
Лист (4).dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:16
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!