Курсовая работа: Робот для загрузки-выгрузки заготовок ПП в рабочую область станка
Описание
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту «Основы проектирования систем автоматического управления оборудования электронных технологий»
на тему:
«Робот для загрузки/выгрузки заготовок ПП в рабочую область станка»
Москва 2007 г.
Содержание
Реферат.. 3Описание интерфейсов установки.. 4
Целевой интерфейс. 5
Энергетический интерфейс. 5
Информационный интерфейс. 5
Процессная модель.. 6
Целевые процессы.. 6
Комплексная принципиальная схема.. 9
Описание датчиков и исполнительных элементов установки и ее САУ.. 11
Компрессор. 11
Блок подготовки воздуха MSB-FRC Festo. 12
Пневмораспределитель с электромагнитным управлением SMC VQ100. 14
Пневмораспределитель с электропневматическим управлением SMC SY3000. 14
Вакуумный эжектор SMCZH.. 16
Дроссели Dr. 16
Дроссель Dr1. 18
Датчики конечного положения DP3, DP4. 20
Датчик давления воздуха DavV.. 22
Микроконтроллер CPC106. 24
Клеммные платы.. 25
Двигатели и контроллеры управления двигателями: 26
SMD-42 – Блок управления шаговым двигателем.. 27
Датчики конечного положения DP.. 28
Ресивер Res. 28
Электрическая схема.. 30
Блок управления пневматикой. 30
Блок питания плат БПП.. 31
Описание монтажной схемы... 40
Заключение.. 41
Список литературы... 42
Приложение.. 43
Реферат
Графические работы выполнены на ПК с помощью программы ASCON KOMPAS v.8+. Электрическая схема выполнена на ПК с помощью программы Schemagee 2.1. Записка выполнена с использованием программного продукта Microsoft Word.
Целью данного курсового проекта является овладение навыками, методами и средствами комплексных разработок механических и электронных компонентов оборудования САУ, а также правилами и методами составления технического задания на программное обеспечение САУ.
Задачи проекта состоят в:
·распределении функций машины между различными компонентами и обоснование этих функций;
·постановке четких технических заданий перед разработчиками отдельных компонентов;
·выполнении технической документации на электронные компоненты.
В проекте разработана система управления робота загрузки/выгрузки заготовок ПП.
Курсовой проект выполнен в следующем объеме: процессная модель (алгоритм работы системы управления установкой); комплексная принципиальная схема (КПС) установки; электрическая схема блока управления пневматикой (ЭЗ), электрическая схема блока питания, схема соединений.
Описание интерфейсов установки
Целью данного курсового проекта является разработка системы автоматизированного управления робота загрузки/выгрузки заготовок ПП.
Станки для выполнения механической обработки заготовок ПП полностью автоматизированы однако заготовки приходится менять вручную разработка автоматического робота существенно повысит производительность подобного оборудования.
В качестве поворотного стола был выбран пневмопривод SMC который осуществляет поворот в зависимости от направления подачи сжатого воздуха. Контроль положения «руки» робота осуществляется с помощью датчиков конечных положений, передающих сигнал на САУ установки.
Целевой интерфейс
Робот предназначена для автоматической подачи и съема заготовок в рабочую область станка. Пневмоцилиндры на «руке» робота осуществляют захват заготовок с помощью вакуумных присосов, перемещение происходит по средствам поворотного стола, а шаговый двигатель в бункере осуществляет подачу новых заготовок.
Энергетический интерфейс
Питание установки производится от сети с напряжением 220В и частотой 50 Гц. Питание необходимо для компрессора Jun Air и для блоков питания компонентов САУ.
Информационный интерфейс
Информационная часть установки состоит из платы CPC106, контроллера шагового двигателя, плат сопряжения с установкой и программы управления установкой.
CPC106 предназначена для обработки поступающей информации и выдачи управляющих воздействий для реализации функций САУ.
Контроллер шагового двигателя предназначен для выработки управляющих сигналов на двигатель, он соединен с СЗС106 по RS-232. Также на CPC106 необходимы соответствующие программы для создания рабочей программы.
Процессная модель
В данном курсовом проекте разрабатывается процессная модель автоматизированного управления роботом для загрузки/выгрузки заготовок ПП.
Целевые процессы
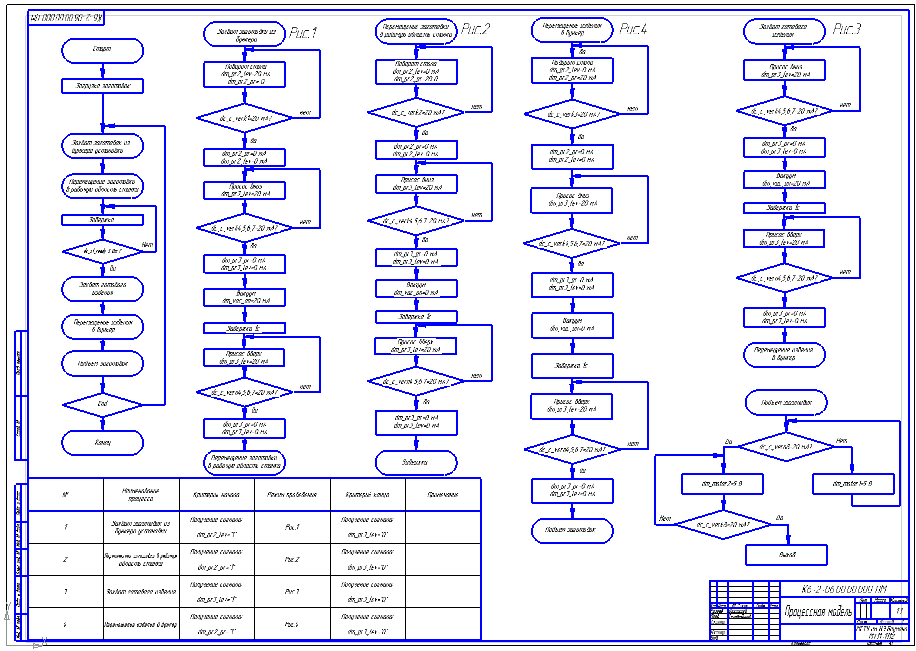
Основные целевые функции представлены на листе “Процессная модель” К6-2-06.00.00.000ПМ.
1.Включение. Оператор включает энергоснабжение САУ и компрессора.
2.Подготовка сжатого воздуха. Производится подготовка сжатого воздуха блоков BPV. При достижении требуемого давления распределитель переключается и в сжатый воздух подводится ко всем механизмам.
3.Загрузка заготовок. Производится загрузка заготовок в бункер.
4.Загрузка программы управления. Выбирается нужная программа управления, предварительно сделанная в соответствующем программном обеспечении.
5.Захват заготовки из бункера установки. После запуска программы рука робота поворачивается к бункеру и производит захват заготовки. Этот процесс состоит из нескольких подпроцессов:
·движения к бункеру (до положения фиксирующегося конечным выключателем)
·После получения сигнала с датчика прекращение подачи сжатого воздуха.
·Движение вакуумного присоса по оси Z до заготовки.
·Напуск воздуха.
·Поднятие заготовки. Осуществляется за счет пневмоцилиндра.
После получения сигнала с датчика прекращениеХарактеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel