Курсовая работа: САУ трёхкоординатного магнитореологического привода для зеркала сверхбольшого телескопа АСТ-25
Описание
Аннотация
Целью данного курсового проекта является овладение навыками, методами и средствами комплексных разработок механических и электронных компонентов оборудования САУ.
Задачи проекта состоят в:
- распределении функций машины между различными компонентами и обоснование этих функций;
- постановке четких технических заданий перед разработчиками отдельных компонентов;
- выполнении технической документации на электронные компоненты.
В проекте разработана система управления составным главным зеркалом большого астрономического телескопа АСТ – 25.
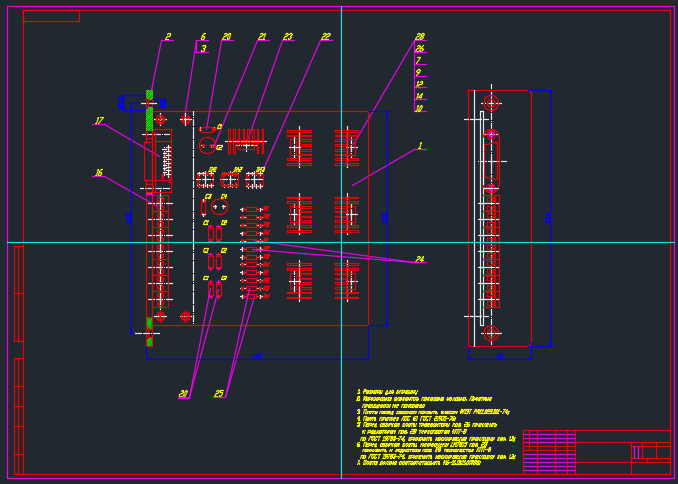
Курсовой проект выполнен в следующем объеме: процессная модель (алгоритм работы системы управления составным главным зеркалом); комплексная принципиальная схема (КПС) составного главного зеркала, включающая разработку общей КПС для всего зеркала и более детальную проработку КПС для одного модуля, состоящего из 6 – ти элементарных зеркал; (механика управление и энергообеспечение), электрические схемы блока усилителей сигнала ЦАП для магнитореологических дросселей. В расчетно-пояснительной записке приведены необходимые пояснения и отражены принципы построения САУ телескопа, даны расчеты и описания.
Оглавление
Задание................................................................................................... 3
Введение................................................................................................. 4
Описание КПС составного главного зеркала (СГЗ)............................... 6
Описание процессной модели................................................................ 9
Процессная модель для микроконтроллера низшего уровня............ 9
1 Общие требования к алгоритму управления........................... 9
1.1 Функции системы........................................................... 9
1.2 Режимы работы.............................................................. 9
2 Процессы, реализуемые в микроконтроллере низшего
уровня...................................................................................... 10
2.1 Основные целевые процессы......................................... 10
2.2 Сервисные процессы...................................................... 13
2.3 Процессы коррекции цели.............................................. 16
Процессная модель для микроконтроллера среднего уровня........... 17
1 Общие требования к алгоритму управления........................... 17
1.1 Функции системы........................................................... 17
1.2 Режимы работы.............................................................. 18
2 Процессы, реализуемые в микроконтроллере среднего
уровня...................................................................................... 18
2.1 Основные целевые процессы......................................... 18
2.2 Сервисные процессы...................................................... 21
2.3 Процессы коррекции цели.............................................. 24
Техническое задание на оригинальные элементы и узлы СГЗ............... 25
МР – Механическая подсистема модуля.......................................... 25
ВЕ – Подсистема энергообеспечения модуля................................... 27
Выбор стандартных компонентов механической подсистемы
модуля.................................................................................................... 31
Выбор компрессора................................................................................ 36
Выбор стандартных компонентов подсистемы управления
модуля.................................................................................................... 37
Расчёт электрических схем..................................................................... 43
Заключение............................................................................................. 46
Список используемой литературы......................................................... 47
Приложение 1......................................................................................... 48
Перечень элементов КПС СГЗ.......................................................... 48
Перечень потоков КПС СГЗ............................................................. 49
Перечень элементов одного модуля СГЗ (М1)................................. 50
Перечень потоков одного модуля СГЗ (М1)..................................... 52
Приложение 2......................................................................................... 55
Введение.
В настоящее время появилось огромное количество телескопов, у которых главное зеркало – рефлектор сделано составным (телескопы KECK, OWL и др). В России тоже создаётся оптический телескоп АСТ – 25 (рис. 1, 2), у которого составное главное зеркало (СГЗ) будет достигать размера 25 метров. СГЗ такого телескопа состоит из большого числа отдельных оптических сегментов (612) (см. рис. 3), что приводит к необходимости автоматического поддержания их как общей поверхности, кроме того, также необходима функция коррекции искажения волнового фронта в реальном времени. Элементарный сегмент такого телескопа представляет собой шестиугольный сегмент с диаметром описанной окружности 1 м., выполненный с пятикратным облегчением веса, т. к. его вес составляет менее 100 кг., из перспективных конструкционных материалов. В соответствии с концепцией построения телескопов типа АСТ, каждый элементарный сегмент подвешен в общей оправе (которая имеет модульную конструкцию) с возможностью поворота вокруг центра массы в двух взаимно перпендикулярных плоскостях и линейного перемещения вдоль вертикальной оси. Он имеет свой собственный узел упругой подвески и собственный юстировочный привод (в дальнейшем, шесть таких ячеек будем называть: одним модулем).
Большие астрономические телескопы с адаптивной оптикой, в частности телескопы типа АСТ, КЭК и др., предъявляют высокие требования по точности позиционирования элементарных сегментов – зеркал (погрешность отклонения реальной геометрической поверхности всего телескопа от идеальной не более 50 нм) и чрезвычайно жёсткие требования по быстродействию (постоянная времени не более 200мс), которые обусловлены необходимостью многократных перемещений и точных позиционирований в процессе функционирования. Не выполнение этих требований приведёт к ухудшению изображения небесных объектов, передаваемого с телескопа.
Быстродействие требует от привода устойчивости – быстрого затухания переходных процессов в режиме точного позиционирования при высокой скорости самих процессов. Для обеспечения такой нанометровой точности позиционирования, миллисекундного быстродействия привода при большом диапазоне перемещения (10 мм.) необходима система управления в реальном времени, которая будет управлять всеми элементарными зеркалами.
Рис. 1 Общий вид сверхбольшого телескопа АСТ-25 (модель)
В качестве привода для элементарного сегмента используется трёхкоординатный магнитореологический привод со следующими характеристиками:
Диапазон перемещений до 10 мм;
Погрешность позиционирования ≤50 нм;
Быстродействие (постоянная времени) ≤200 мс;
Малая величина гистерезиса при
Реверсивном движении привода менее 20%;
Передаваемое усилие до 120 кг.
Целью данного курсового проекта является разработка системы управления в реальном времени для юстировки элементарных зеркал большого астрономического телескопа и совмещения их в единую геометрическую поверхность требуемой формы, с компенсацией внешних возмущающих воздействий.
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel