Задача 3 вариант 25
-50%
Описание
- ⭐Полностью готовая работа в идеальном компьютерном качестве⭐
- 💎️100 % гарантия безупречного исполнения💎
- 👇Образец выполнения в описании👇
- 💬Вопросы перед покупкой можно задать здесь 👉 Написать эксперту
- 📝Нужно домашнее задание целиком? - 📚Открывай полную Коллекцию👇
 Показать/скрыть дополнительное описание
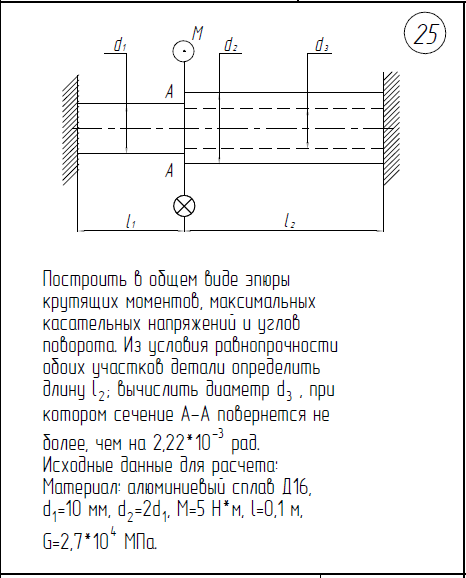
Показать/скрыть дополнительное описаниеПостроить в общем виде эпюры М/к, τ/max, φ. Из условия равнопрочности обоих участков детали определить длину l/2; вычислить диаметр d/3, при котором сечение А-А повернется не более чем на 2,22*10-3/рад. Исходные данные для расчета: Материал: алюминиевый сплав Д16, d/1=10мм; d/2=2d/1=20мм; M=5Нм; l/1=0,1м; G=2,7*104/МПа .
Этот файл в коллекциях


Характеристики решённой задачи
Предмет
Учебное заведение
Семестр
Номер задания
Вариант
Программы
Теги
Просмотров
443
Качество
Идеальное компьютерное
Размер
217,42 Kb
Список файлов
Вариант 25 - Задача 3.pdf

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
25 августа 2013 в 15:06
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
















