Курсовая работа 90: Проектирование и исследование механизмов двухударного холодновысадочного автомата вариант А
-50%
Описание
Проектирование и исследование механизмов двухударного холодновысадочного автомата
Содержание
- Содержание............................................................................................ 2
- Аннотация.............................................................................................. 3
- Обьем и содержание курсового проекта............................................... 4
- Задание № 90А....................................................................................... 6
- Таблица исходных данных..................................................................... 8
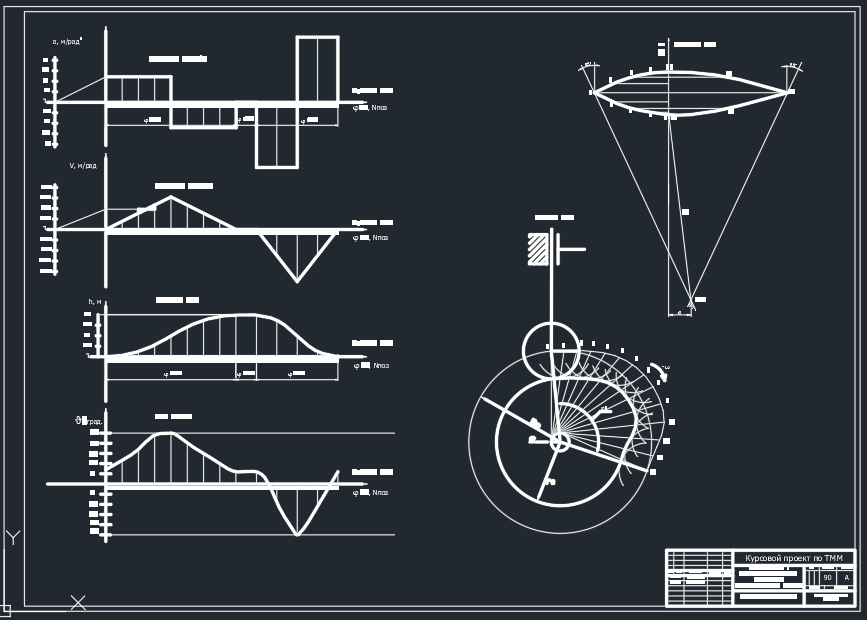
- Лист 1. Проектирование основного механизма, определение динамической модели и закона его движения.... 10
- Лист 2. Силовой расчет основного механизма................................... 18
- Лист 3. Проектирование зубчатой передачи и планетарного редуктора....23
- Лист 4. Проектирование кулачкового механизма.............................. 26
- Вывод................................................................................................... 27
- Литература........................................................................................... 28
Аннотация
В данной расчетно-пояснительной записке проведено проектирование исследование механизмов двухударного холодновысадочного явтомата, проведен кинетостатический силовой расчет основного механизма, проектирование силовой цилиндрической зубчатой передачи и кулачкового механизма.Расчетно-пояснительная записка к курсовому проекту по курсу ТММ содержит 28 страницы машинописного текста, 6 таблиц и 13 рисунков.
Объем и содержание курсового проекта
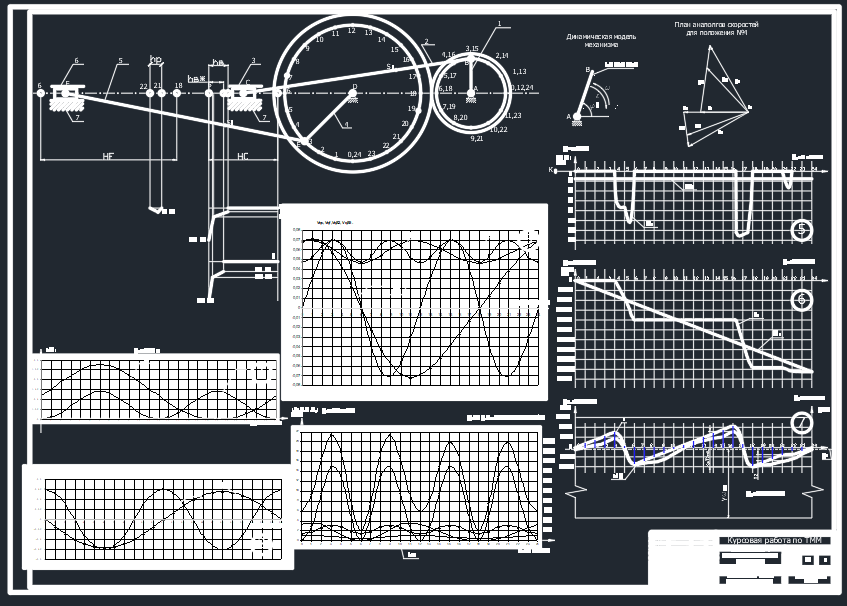
- Лист 1. Проектирование основного механизма высадки и определение закона его движения.
б) Определение необходимого момента инерции маховых масс, обеспечивающих вращение кривошипа с заданным коэффициентом неравномерности хода при установившемся режиме работы. Определение момента инерции дополнительной маховой массы (маховика), установленного на валу кривошипа.
г) Построение диаграммы изменения угловой скорости кривошипа за время одного цикла (оборота) при установившемся режиме работы механизма.
Примечание. Массы и моменты инерции звеньев механизма даны ориентировочно.
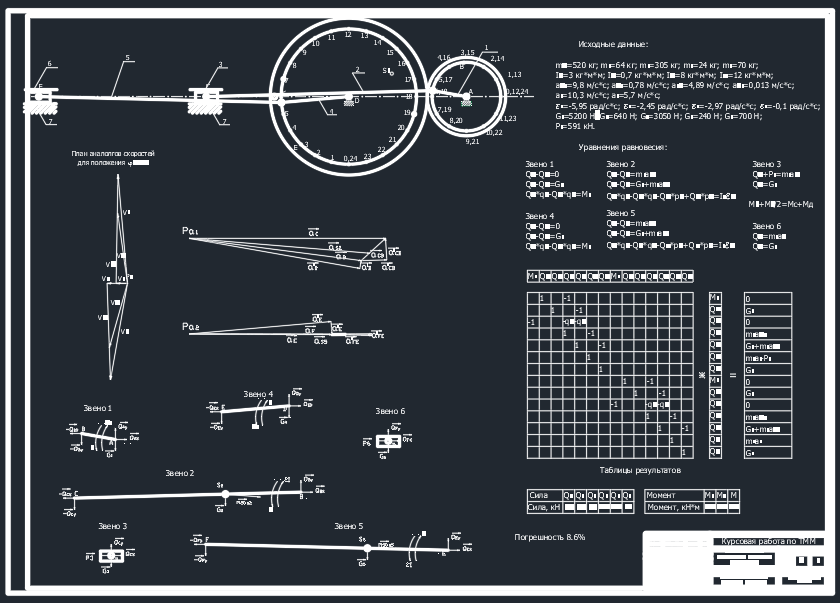
- Лист 2. Силовой расчет основного механизма автомата.
б) Построение картины силового нагружения механизма.
в) Определение сил в кинематических парах механизма.
г) Оценка точности расчетов, выполненных на 1-ом и 2-ом листах проекта, по уравнению моментов или уравнению сил для ведущего или ведомого звена механизма.
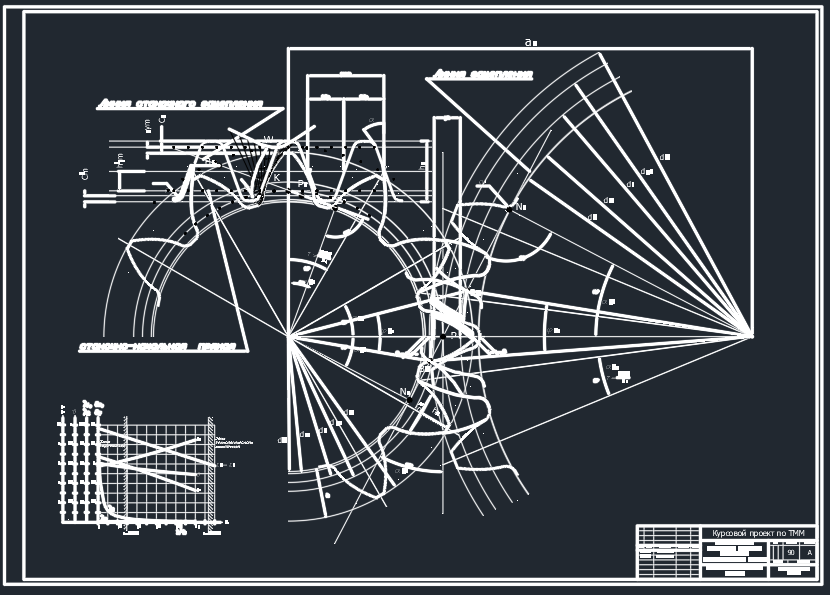
- Лист 3. Проектирование кулачкового механизма.
б) Определение основных размеров кулачкового механизма наименьших габаритов с учетом максимально допустимого угла давления (a доп).
в) Построение профиля кулачка (центрового и конструктивного).
г) Построение диаграммы изменения угла давления в функции угла поворота кулачка.
- Лист 4. Проектирование зубчатой передачи и планетарного редуктора.
б) Построение схемы станочного зацепления при нарезании колеса с меньшим числом зубьев и профилирование зуба (включая галтель) методом огибания.
в) Вычерчивание схемы зацепления колес с указанием основных размеров и элементов колес и передачи.
г) Проектирование планетарного редуктора (подбор числа зубьев) по заданному передаточному отношению редуктора и числу сателлитов. Допустимое отклонение iред ± 5%. Колеса планетарного редуктора нулевые; модуль колес принять равным единице.
д) Определение передаточного отношения линейных скоростей и чисел оборотов звеньев спроектированного редуктора графическим способом.
Техническое задание
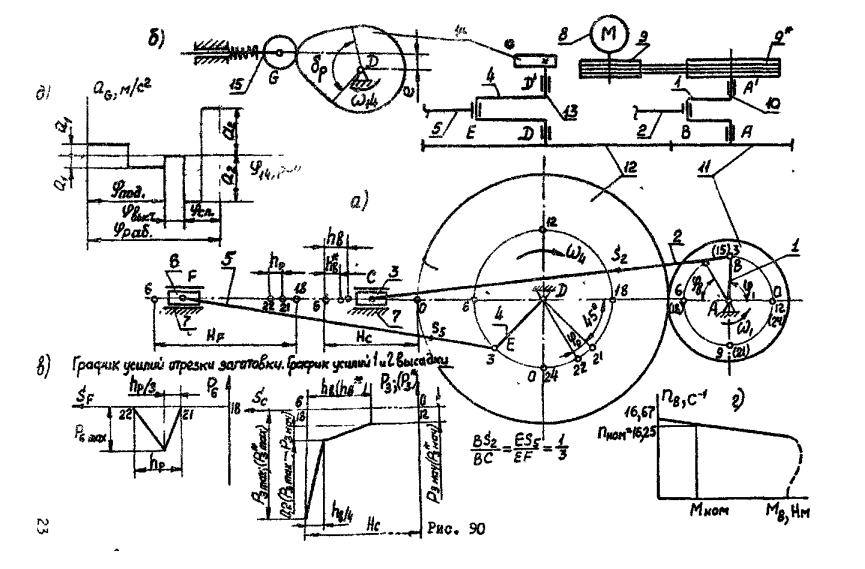
Двухударный холодновысадочный автомат, схема механизмов которого приведена на рис. 90 а, предназначен для изготовления из калиброванного прутка заготовок болтов, винтов и других озделий со сложной формой головки. На автомате все операции: подача прутка, отрезка и перемещение заготовки, высадка заготовки, высадка головки и выталкивание готового изделия из матрицы – полностью автоматизированы.От вала электродвигателя 8 через ременную передачу 9-9* вращение передаётся коленчатому валу 10 и далее через зубчатую передачу 11-12 распределительному валу 13. Основная маховая масса сосредоточена на шкиве 9*. Коэффициент неравномерности вращения δ=1/15. Мощность электродвигателя 20 кВт, коэффициент перегрузочной способности λ=2,2.
Кривошипно-ползунный механизм высадки (см рис.) состоящий из кривошипа 1, шатуна 2 и высадочного ползуна 3 (Hc – ход ползуна), приводится в движение от коленчатого вала 10. Высадка головки изделия осущесвтляется поочерёдно двумя пуансонами, закреплёнными в пуансонодержателе ползуна 3, за два оборота кривошипа 1. При первой высадке ползун 3 перемещается на расстояние hb (при этом кривошип 1 проворачивается на угол φb), при второй высадке ползун перемещается на расстояние hb*. График усилий (Р3, Sc) и (Р3*, Sc) первой и второй высадки представлен на рисунке.
Все остальные механизмы автомата получают движение от распределительного вала 13. Ползун 6 механизма отрезки прутка приводится в движение через шатун 5 от кривошипа 4. На ползуне 6 (HF –ход ползуна) выполнен криволинейный паз, в который вставлен ролик межосевого штока (на рисунке не показаны). При перемещении ползуна 6 на расстояние hp, что соответствует повороту кривошипа 4 на угол φр, нож отрезает заготовку. График усилий отрезки (Рb, SF) приведен на рисунке.
После второй высадки происходит выталкивание готового изделия из матрицы. Механизм выталкивания состоит из кулачка 14, закрепленного на распределительном валу 13, имеющего внеосность е, который перемещает выталкиватель изделий. График изменения ускорения толкателя 15 (aG, φ14) задаётся.
Исходные данные
Таблица №1Название | Обоз. | Велич. | Размер. |
Угол поворота кривошипа 1 за время первой высадки | jв | 60 | Град |
Ход ползуна 3 при первой высадке | hв | 0.039 | м |
Ход ползуна 3 при второй высадке | hв* | 0.03 | м |
Отношение длины шатуна 2 к длине кривошипа 1 | LBC/LAB | 6.6 | |
Начальное усилие первой высадки | Р3нач | 75 | КН |
Максимальное усилие первой высадки | Р3мах | 650 | КН |
Начальное усилие второй высадки | Р*3нач | 200 | КН |
Максимальное усилие второй высадки | Р*3мах | 800 | КН |
Масса коленчатого вала 10 | m10 | 520 | кг |
Масса шатуна 2 | m2 | 64 | кг |
Масса ползуна 3 | m3 | 305 | кг |
Момент инерции шатуна 2 относительно оси, проходящей через его ценр тяжести S2 | IS2 | 3.0 | Кг*м2 |
Угол поворота кривошипа 4 за время отрезки заготовки | jр | 15 | Град |
Ход ползуна 6 при отрезке заготовки | hР | 0.0267 | м |
Отношение длины шатуна 5 к длине кривошипа 4 | LFE/LED | 3.6 | |
Максимальное усилие действующее на ползун 6 | Р6мах | 55 | КН |
Масса шатуна 5 | m2 | 24 | кг |
Масса ползуна 6 | m3 | 70 | кг |
Момент инерции шатуна 5 относительно оси, проходящей через его ценр тяжести S5 | IS5 | 0.7 | Кг*м2 |
Момент инерции коленчатого вала 10 с зубчатым колесом 11 | I1А | 8.0 | Кг*м2 |
Момент инерции рапределительного вала13 с зубчатым колесом 12 | I4D | 12.0 | Кг*м2 |
Число зубьев колес зубчатой передачи 11-12 | Z11 | 12 | |
Z12 | 24 | ||
Модуль зубчатых колес 11 и 12 | m | 15 | Мм |
Ход толкателя 15 | h | 0.02 | м |
Угол поворота кулачка 14 при подъеме толкателя 15 | jпод | 64 | Град |
Угол поворота кулачка 14 при выстое толкателя 15 | jвыст | 10 | Град |
Угол поворота кулачка 14 при спуске толкателя 15 | jсп | 40 | Град |
Соотношение между значениями ускорений толкателя | a2/а1 | 2.56 | |
Максимально допустимый угол давления в кулачковом механизме | aдоп | 25 | Град |
Передаточное отношение ременной передачи 9-9 | U9 | 6.95 | |
Передаточное отношение однорядного планетарного редуктора | U1в | 6.95 | |
Коэф-т неравномерности вращения | d | 1/15 | |
Число сателлитов в планетарном редукторе | К | 3 | |
Угловая координата входного звена для силового расчета | j1 | 170 | град |
Чертежи
Лист 1 - Определение закона движения ![]()
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
374
Качество
Идеальное компьютерное
Размер
1,29 Mb
Список файлов
РПЗ.doc
Графики.xls
Лист 1.dwg
Лист 2.dwg
Лист 3.dwg
Лист 4.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
21 августа 2013 в 20:50
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!


















