Другое 74: Проектирование и исследование механизмов управления летательного аппарата с качающимся раструбом вариант А
Описание
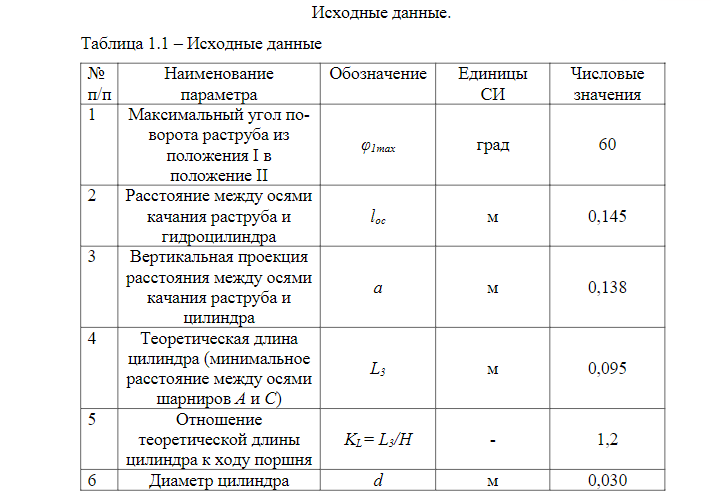
ТЕХНИЧЕСКОЕ ЗАДАНИЕ
Корректировка траектории полёта летательного аппарата производится за счёт изменения направления потока газов, выходящих из сопла II через раструб I, который приводится в движение рулевой машиной. Механизм рулевой машины состоит из гидравлического цилиндра 3 с поршнем 2, шток которого шарнирно соединён с раструбом I. В нейтральном положении оси раструба и сопла совпадают. В зависимости от направления движения поршня раструб поворачивается относительно поперечной оси О по или против часовой стрелки, изменяя направление потока газов, выходящих из сопла. Если раструб поворачивается относительно нейтрального положения против часовой стрелки,
то летательный аппарат повернётся относительно поперечной оси по часовой стрелке.
Система управления содержит источник питания 9 (как правило электрического типа), который приводит в движение электродвигатель 8. Движение от электродвигателя через планетарный редуктор 7 передаётся одной из двух одинаковых шестерён масляного насоса 6, который подаёт масло в рабочие полости цилиндра 3 рулевой машины. Если клапаны 4 и 5 закрыты, то давление масла в левой и правой полостях одинаково, и поршень неподвижен.
Если, например, необходимо повернуть летательный аппарат по часовой стрелке, то с автомата управления 10 подаётся сигнал на клапан 5 и он открывается; при этом часть масла, подаваемого в правую полость по трубопроводам, поступит обратно в шестерённый насос, давление в правой
полости станет меньше, чем в левой, поршень переместится и повернёт раструб против часовой стрелки. При необходимости повернуть летательный аппарат против часовой стрелки сигнал с автомата управления 10 подаётся на клапан 4.
При отсутствии сигналов управления и закрытых клапанах 4 и 5 давление в рабочих полостях цилиндра 3 может превысить расчётное. В этом случае открываются предохранительные клапаны 12, сбрасывающие масло в полость шестерённого насоса 6.
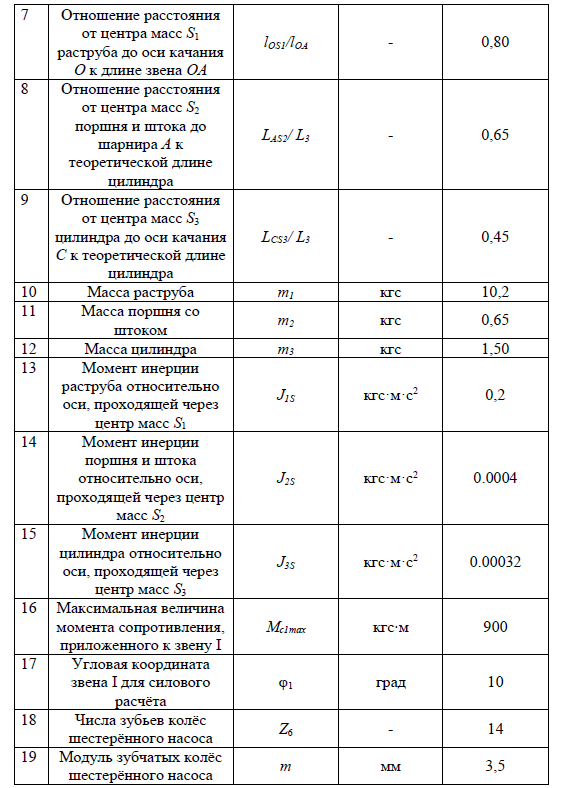
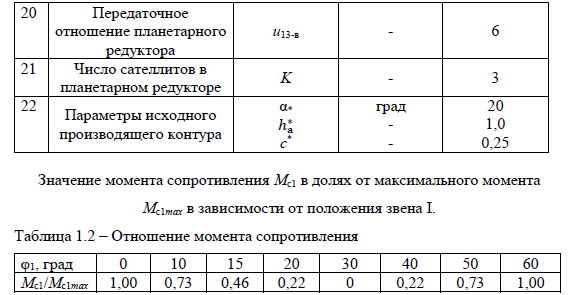
При повороте раструба из одного крайнего положения (I) в другое (II) на угол φ1max на звено I действует момент сопротивления Мс1, зависимость которого от угла поворота φ1 представлена диаграммой (Мс1, φ1). Данные для построения диаграммы приведены в таблице 1.
Результирующее давление в гидроцилиндре меняется по закону, изображённому на индикаторной диаграмме. Давление PI при повороте раструба на угол φ1 = 0 – 15о должно обеспечить величину приведённого движущего момента в начальном положении механизма в 1.2 раза больше Мс1max. Останов раструба в конечном положении II должен происходить без удара.
В механизмах управления летательного аппарата отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
Примечание: При определении закона движения механизма угол поворота раструба φ1max разделить на 6 равных интервалов и дополнительно рассмотреть положение механизма при φ1 = 15о.
![]()
![]()
![]()
Корректировка траектории полёта летательного аппарата производится за счёт изменения направления потока газов, выходящих из сопла II через раструб I, который приводится в движение рулевой машиной. Механизм рулевой машины состоит из гидравлического цилиндра 3 с поршнем 2, шток которого шарнирно соединён с раструбом I. В нейтральном положении оси раструба и сопла совпадают. В зависимости от направления движения поршня раструб поворачивается относительно поперечной оси О по или против часовой стрелки, изменяя направление потока газов, выходящих из сопла. Если раструб поворачивается относительно нейтрального положения против часовой стрелки,
то летательный аппарат повернётся относительно поперечной оси по часовой стрелке.
Система управления содержит источник питания 9 (как правило электрического типа), который приводит в движение электродвигатель 8. Движение от электродвигателя через планетарный редуктор 7 передаётся одной из двух одинаковых шестерён масляного насоса 6, который подаёт масло в рабочие полости цилиндра 3 рулевой машины. Если клапаны 4 и 5 закрыты, то давление масла в левой и правой полостях одинаково, и поршень неподвижен.
Если, например, необходимо повернуть летательный аппарат по часовой стрелке, то с автомата управления 10 подаётся сигнал на клапан 5 и он открывается; при этом часть масла, подаваемого в правую полость по трубопроводам, поступит обратно в шестерённый насос, давление в правой
полости станет меньше, чем в левой, поршень переместится и повернёт раструб против часовой стрелки. При необходимости повернуть летательный аппарат против часовой стрелки сигнал с автомата управления 10 подаётся на клапан 4.
При отсутствии сигналов управления и закрытых клапанах 4 и 5 давление в рабочих полостях цилиндра 3 может превысить расчётное. В этом случае открываются предохранительные клапаны 12, сбрасывающие масло в полость шестерённого насоса 6.
При повороте раструба из одного крайнего положения (I) в другое (II) на угол φ1max на звено I действует момент сопротивления Мс1, зависимость которого от угла поворота φ1 представлена диаграммой (Мс1, φ1). Данные для построения диаграммы приведены в таблице 1.
Результирующее давление в гидроцилиндре меняется по закону, изображённому на индикаторной диаграмме. Давление PI при повороте раструба на угол φ1 = 0 – 15о должно обеспечить величину приведённого движущего момента в начальном положении механизма в 1.2 раза больше Мс1max. Останов раструба в конечном положении II должен происходить без удара.
В механизмах управления летательного аппарата отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
Примечание: При определении закона движения механизма угол поворота раструба φ1max разделить на 6 равных интервалов и дополнительно рассмотреть положение механизма при φ1 = 15о.
Характеристики учебной работы
Тип
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
229
Размер
2,3 Mb
Список файлов
Проектирование и исследование механизмов управления летательного аппарата с качающимся раструбом (вариант №74А)
Определение закона движения.pdf
Проектирование зубчатой передачи.pdf
Проектирование кулачкового механизма.pdf
РПЗ.pdf
Силовой расчет.pdf

НОВИНКА: отчеты по практикам! Поиск - по названию предприятия в тэге. База учебных материалов МГТУ им. Н.Э. Баумана в формате pdf, оригиналы файлов отсутствуют (если иное не оговорено в описании). Вопросы задавайте ДО покупки в комментариях под файлами.
02 октября 2020 в 23:48
Вопросы

Вопрос
Здравствуйте! К сожалению, нет, все файлы имеют формат pdf.
Отзывы на другие работы автора
Отзыв
14Г - Проектирование и исследование механизмов четырехтактного двигателя внутреннего сгорания
Все хорошо расписано, но есть некоторые недочеты в расчетах.
Отзыв
Допуски и посадки
В целом все верно, но мне сказали: "почему корпус неразъемный? Как ты подшипник сможешь вставить в корпус не разбирая его?"
Отзыв
Организационно-экономический анализ ПАО "Туполев"
соотвествует описанию, немного отличается по содержанию от более современнной методички

Отзыв
Расчет соединений
Пришёл только файл решения в пдф. Нет файла в Ворде. Возможно его получить ? вордовский файл решения) ?
Здравствуйте, к сожалению, файл Word отсутствует.
Отзыв
Расчет соединений
отлично


















