Курсовая работа 1: Проектирование и исследование механизмов долбежного станка с качающейся кулисой вариант А
-50%
Описание
Проектирование и исследование механизмов долбежного станка с качающейся кулисой
Реферат
Расчетно-пояснительная записка к курсовому проекту " Проектирование и исследование механизмов долбежного станка с качающейся кулисой" содержит 37 страниц машинописного текста, 24 рисунка, 10 таблиц.В данной расчетно-пояснительной записке приведено: проектирование кривошипно-кулисного механизма и определение закона его движения, силовой расчет кривошипно-кулисного механизма с учетом динамических нагрузок, проектирование кулачкового механизма поперечной подачи стола, проектирование зубчатой передачи и планетарного редуктора.
Оглавление
1. Техническое задание......................................................................................................41.1 Назначение, функциональная схема, принцип работы............................................4
1.2. Исходные данные........................................................................................................6
2. Проектирование кривошипно-кулисного механизма и определение закона его движения.........................................................................................................................................8
2.1. Определение основных размеров механизма по заданным условиям...................8
2.2. Выбор динамической модели механизма.................................................................8
2.3.а Определение координат точек механизма..............................................................9
2.3.б Определение аналогов скоростей основного механизма....................................11
2.3.в Таблицы значений аналогов скоростей и ускорений..........................................11
2.4. Определение приведенного момента движущих сил и суммарного приведенного момента................................................................................................................12
2.5.а Определение приведенных моментов инерции второй группы звеньев механизма.....................................................................................................................................14
2.5.б. Определение производных приведенных моментов инерции второй группы звеньев механизма.......................................................................................................................14
2.6. Определение работы движущей силы, сил сопротивления и суммарной работы...........................................................................................................................................15
2.7. Построение графика изменения кинетической энергий для первой группы звеньев...........................................................................................................................................16
2.8. Построение диаграммы угловой скорости и углового ускорения звена приведения....................................................................................................................................17
2.9. Расчет массы и размера маховика...........................................................................18
3. Силовой расчет механизма.........................................................................................19
4. Проектирование зубчатой передачи и планетарного редуктора.............................26
4.1. Изготовление шестерни стартерной передачи.......................................................26
4.2. Построение схемы станочного зацепления............................................................26
4.3. Определение коэффициента смещения шестерни.................................................27
4.4. Построение профиля зуба........................................................................................27
4.5. Построение схемы зацепления колес стартерной зубчатой передачи.................30
4.6. Определение чисел зубьев планетарного механизма............................................31
4.7. Графическое определение передаточного отношения..........................................32
5. Проектирование кулачкового механизма..................................................................33
5.1. Построение кинематических диаграмм движения толкателя с использованием ЭВМ...............................................................................................................................................33
5.2. Определение основных размеров кулачкового механизма...................................34
5.3. Построение профиля кулачка..................................................................................35
5.4. Построение графика изменения углов давления...................................................35
6. Заключение...................................................................................................................36
Список литературы..........................................................................................................36
Программное обеспечение..............................................................................................36
1. Техническое задание
1.1 Назначение, функциональная схема, принцип работы
Долбежный станок предназначен для долбления пазов и внутренних канавок в отверстиях деталей, а также для строгания вертикально расположенных поверхностей. Станок имеет следующие основные узлы: станину 1, ползун 2 с резцовой головкой, стол 3, электродвигатель 4, коробку скоростей 5 и передаточные механизмы (рис. 1—1). 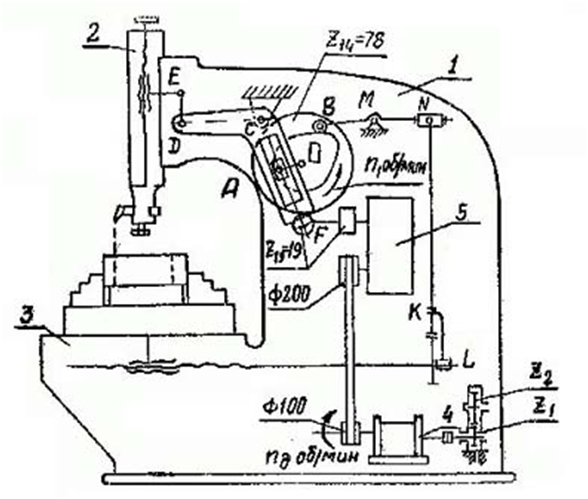
Рис. 1—1. Общий вид долбежного станка с качающейся кулисой
Резание металла осуществляется резцом, закрепленным в резцовой головке, при его возвратно-поступательном движения в вертикальном направлении. Для движения резца используется шестизвенный кривошипно-кулисный механизм с качающейся кулисой, состоящий из кривошипа 1, камня 2, кулисы 3, поводка 4 и ползуна 5 (рис. 1—2).
 Рис. 1—2.Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола.
Рис. 1—2.Схема кривошипно-кулисного механизма движения резца и кулачкового механизма подачи стола. Ход ползуна Н выбирается в зависимости от длины lд обрабатываемой поверхности с учетом перебегов lп в начале и конце рабочего хода. Длина хода ползуна может изменяться при наладке станка для обработки конкретных деталей. Средняя скорость резания vрез (скорость поступательного движения при рабочем ходе ползуна) выбирается в зависимости от условии обработки и обеспечивается при помощи привода, состоящего из электродвигателя 4, ременной передачи, коробки скоростей 5, зубчатой передачи и кулисного механизма (рис. 1—1). Подача охлаждающей жидкости в зону резания обеспечивается при помощи 'шестереночного насоса Z1, Z2 (рис. 1—1) и системы трубопроводов (на рисунке не показаны).Число двойных ходов ползуна в минуту, равное числу оборотов кривошипа n1, определяют по заданной скорости резания vрез с учетом коэффициента Кv изменения средней скорости. Во время перебега в конце холостого и начале рабочего ходов (см, циклограмму на рис. 1-3) осуществляется. Перемещение стола на величину подачи с помощью ходового винта. Поворот винта производится посредством храпового механизма, состоящего из колеса 9, рычага 8 с собачкой 10,
 Рис 1—3. Циклограмма работы механизма долбежного станка.
Рис 1—3. Циклограмма работы механизма долбежного станка. 
Рис. 1—4. Закон изменения ускорения толкателя кулачкового механизма
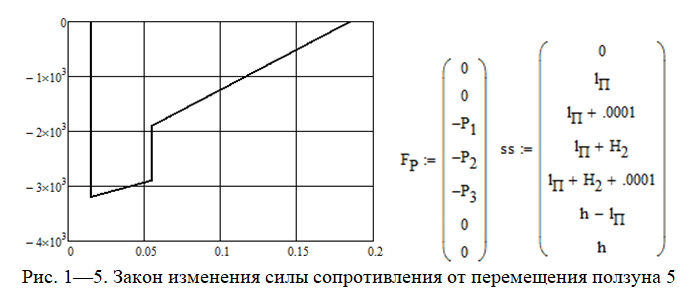 тяги 7 и толкателя 6 (рис. 1—2). Поворот толкателя 6 осуществляется от дискового кулачка, закрепленного нa одном валу с кривошипом. Регулирование подачи стола производится путем изменения длины рычага МN, что позволяет изменять количество зубьев, захватываемых собачкой и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектировании кулачкового механизма необходимо обеспечить заданный закон изменения ускорения при движении толкателя (рис. 1—4) и осуществить подачу во время верхнего (в конце холостого и начале рабочего ходов) перебега резца в соответствии с циклограммой (рис. 1-3). При проектировании и исследовании механизмов привода и подачи станка считать известными параметры, приведенные в табл.1—1. Проектирование планетарного редуктора провести по дополнительному заданию (Приложение III, рис. III—4, табл. III—4).
тяги 7 и толкателя 6 (рис. 1—2). Поворот толкателя 6 осуществляется от дискового кулачка, закрепленного нa одном валу с кривошипом. Регулирование подачи стола производится путем изменения длины рычага МN, что позволяет изменять количество зубьев, захватываемых собачкой и, следовательно, обеспечивает поворот ходового винта на требуемый угол. При проектировании кулачкового механизма необходимо обеспечить заданный закон изменения ускорения при движении толкателя (рис. 1—4) и осуществить подачу во время верхнего (в конце холостого и начале рабочего ходов) перебега резца в соответствии с циклограммой (рис. 1-3). При проектировании и исследовании механизмов привода и подачи станка считать известными параметры, приведенные в табл.1—1. Проектирование планетарного редуктора провести по дополнительному заданию (Приложение III, рис. III—4, табл. III—4).1.2. Исходные данные
Таблица 1—1| № ц/п | Наименование параметра | Обозначение | Размерность | Числовые значения |
| 1 | Длина детали | lд | м | 0,17 |
| 2 | Длина перебега резца | lп | м | 0,015 |
| 3 | Скорость резания | Vрез | м/с | 0,333 |
| 4 | Коэффициент изменения скорости ползуна | KV | - | 1,8 |
| 5 | Число оборотов электродвигателя | nд | об/мин | 1420 |
| 6 | Межосевое расстояние в кривошипно-кулисном механизма | lOC | м | 0,15 |
| 7 | Конструктивный угол кулисы | β | град | 35 |
| 8 | Сила резания | P1 P2 P3 | Н Н Н | 3200 2900 1900 |
| 9 | Вес ползуна | G5 | Н | 450 |
| 10 | Вес кулисы | G3 | Н | 220 |
| 11 | Момент инерции кулисы относительно оси C | I3c | кг∙м2 | 0,13 |
| 12 | Соотношение между размерами звеньев ED и DC | - | 0,4 | |
| 13 | Вылет резца | lр | м | 0,10 |
| 14 | Коэффициент неравномерности вращения кривошипа | δ | - | 0,04 |
| 15 | Маховый момент ротора электродвигателя | кг∙м2 | 0,09 | |
| 16 | Маховый момент зубчатых механизмов и шкивов, приведенный к валу кривошипа O | GD2 | кг∙м2 | 20 |
| 17 | Угловая координата кривошипа для силового расчета (рис. 1-2) | ϕ1 | град | 150 |
| 18 | Угол поворота толкателя | ψв | град | 20 |
| 19 | Длина толкателя | lBM | м | 0,10 |
| 20 | Максимально допустимый угол давления в кулачковом механизме | αдоп | град | 40 |
| 21 | Соотношение между ускорениями толкателя (рис. 1-4) | - | 3 | |
| 22 | Числа зубьев в передаче 1, 2 (рис. 1-1) | z1 z2 | - - | 11 15 |
| 23 | Модуль колес z1, z2 | m | мм | 2 |
| 24 | Параметры исходного контура реечного инструмента | α0 c* | град - - | 20 1 0,25 |
Расчеты в Mathcad ![]()

Чертежи
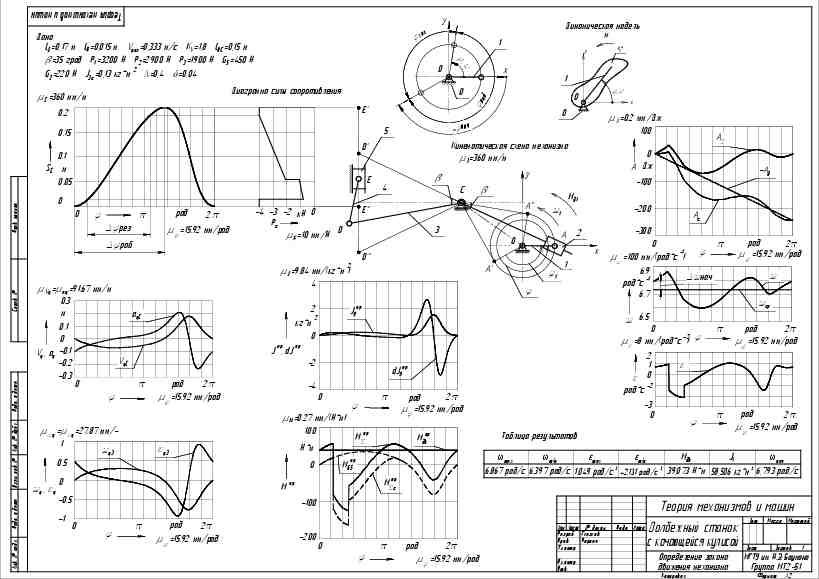
Лист 1 - Определение закона движения механизма ![]()
Лист 2 - Силовой расчет ![]()

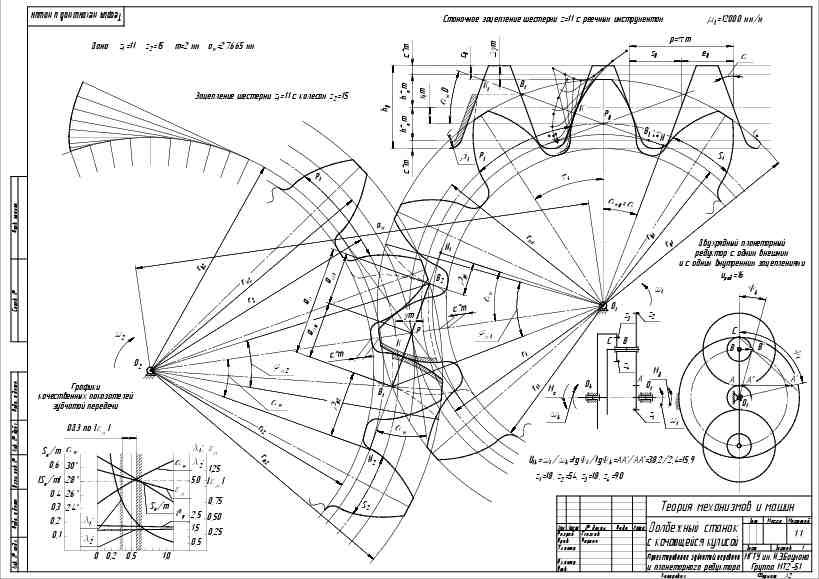
Лист 3 - Проектирование зубчатой передачи и планетарного редуктора ![]()
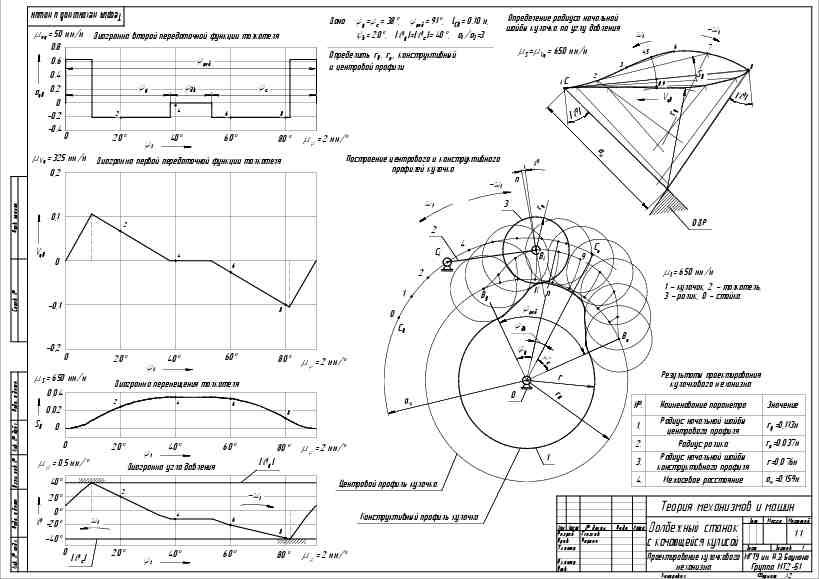
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
1093
Качество
Идеальное компьютерное
Размер
14,64 Mb
Преподаватели

Список файлов
РПЗ.docx
Маткад.xmcd
Лист (1).dwg
Лист (1).pdf
Лист (2).dwg
Лист (2).pdf
Лист (3).dwg
Лист (3).pdf
Лист (4).dwg
Лист (4).pdf

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
18 апреля 2016 в 11:58
Вопросы

Вопрос
Подскажите, чертежи какой версией программы открывать?

Здравствуйте! Autocad - 2022 и выше. Mathcad - 15.



















