Курсовая работа 84: Проектирование и исследование механизмов кривошипо-ползунного пресса вариант Б
-50%
Описание
Проектирование и исследование механизмов кривошипо-ползунного пресса
Содержание- 1. Определение закона движения механизма
- 1.1. Постановка задачи
- 1.2.1 Исходные данные
- 1.2.2 Определение размеров механизма
- 1.3. Определение параметров динамической модели
- 1.3.1. Построение диаграмм передаточных функций механизма
- 1.3.1.1. Определение функций положения механизма
- 1.3.2. Построение диаграммы изменения усилия вытяжки P по пути ползуна 5
- 1.3.3. Определение суммарного приведенного момента действующих сил
- 1.3.3.1. Определение приведенного момента силы вытяжки
- 1.3.3.2. Определение приведенного момента сил тяжести
- 1.3.3.3. Определение движущего момента
- 1.3.4. Определение приведенных моментов инерции звеньев
- 1.4. Построение диаграммы суммарной работы действующих сил
- 1.4.1. Диаграммы работ движущей силы, силы сопротивления и суммарной работы
- 1.5. Производные приведенных моментов инерции
- 1.6. Построение диаграммы угловой скорости звена 1(звена приведения)
- 1.6.1. Зависимость угла поворота от времени
- 1.7. Построение углового ускорения звена 1(звена приведения)
- 2. Силовой расчет
- 2.1. Построение планов скоростей и ускорений.
- 2.2. Исходные данные:
- 2.3. Кинематическую схему механизма строим в масштабе
- 2.4. Определение главных векторов сил инерции, главных моментов сил инерции, сил тяжести подвижных звеньев:
- 2.5. Определение сил в кинематических парах.
- 2.5.1. Для определения силы F34 необходимо рассмотреть 2 и 3 звенья вместе и записать сумму моментов относительно точки А:
- 2.5.2. Для определения силы в кинематической паре 2,3 необходимо построить план сил, действующих на звено 3.
- 2.5.3. Для определения силы в кинематической паре 2,1 необходимо построить план сил, действующих на группу звеньев 2-3.
- 2.6. Определение движущего момента.
- 2.7 Определение относительного расхождения
- 3. Проектирование цилиндрической эвольвентной зубчатой передачи и планетарного мультипликатора
- 3.1. Проектирование зубчатой передачи
- 3.1.1. Постановка задачи
- 3.1.2. Исходные данные:
- 3.1.3. Геометрический расчет зацепления
- 3.1.3.1. Определение радиусов делительных окружностей
- 3.1.3.2. Определение радиусов основных окружностей
- 3.1.3.3. Определение минимальных значений коэффициентов смещения
- 3.1.3.4. Определение угла зацепления
- 3.1.3.5. Определение коэффициента воспринимаемого смещения
- 3.1.3.6. Определение коэффициента уравнительного смещения
- 3.1.3.7. Определение радиусов начальных окружностей
- 3.1.3.8. Определение межосевого расстояния
- 3.1.3.9. Определение радиусов окружностей вершин
- 3.1.3.10. Определение радиусов окружностей впадин
- 3.1.3.11. Определение высоты зубьев
- 3.1.3.12. Определение толщины зубьев под дугами делительных окружностей
- 3.1.3.13. Определение угла профиля на окружностях вершин зубьев колес
- 3.1.3.14. Определение толщины зубьев под дугами окружностей вершин
- 3.1.3.15. Определение шага по хорде делительной окружности шестерни и колеса
- 3.1.3.16. Определение размеров, необходимых для построения станочного зацепления
- 3.1.3.17. Определение качественных показателей зубчатой передачи
- 3.1.4. Выбор коэффициентов смещения
- 3.1.5. Результаты расчета зубчатой передачи
- 3.1.6. Построение схемы станочного зацепления и схемы эвольвентного зацепления
- 3.1.6.1. Определение радиуса граничных точек
- 3.1.6.2. Определение координат профиля зуба шестерни
- 3.1.6.3. Определение координат переходной кривой зуба шестерни
- 4. Проектирование планетарного редуктора.
- 4.1. Исходные данные.
- 4.2. Некоторые особенности расчета заданной схемы.
- 4.3. Выбор чисела зубьев колёс.
- 4.4. Условия, которым должны удовлетворять зубья колёс.
- 5 .Проектирование кулачкового механизма графическим методом.
- 5.1. Построение гафиков передаточных функций.
- 5.1.1. Построение графика второй передаточной функции
- 5.1.2. Построение графика первой передаточной функции
- 5.1.3. Построение графика пермещения
- 5.1.4. Построение Фазового портрета
1.1. Постановка задачи
Для заданного механизма кртвоштпо-ползунного пресса при известных размерах, массах и моментах инерции звеньев, при заданных внешних силовых воздействиях с учетом установившегося режима движения определить закон движения механизма.1.2.1 Исходные данные
Вертикальный кривошипно-ползунный пресс (рис. 84а) предназначен для холодной штамповки (вырубки, гибки, вытяжки и др.).Движение от электродвигателя 1 через зубчатую пару колес 2,3 и планетарный редуктор 3-4-5-6 и водило 7 передается по кривошипу 8 и далее через шатун 9 ползуну 10, производящему штамповку деталей в матрице 11.
Характер изменения сил вытяжки Ра max представлен на рис. 84б. Изменение движущего момента Мд на валу кривошипа 8 в зависимости от угла поворота кривошипа показан на рис. 84в.
Справа (рис. 84а) на оси кривошипа находится маховик 12, маховой момент которого помогает выполнению работ по прессованию, а с левой стороны расположен масляный насос 13 кулачкового типа (рис.84г). Закон изменения ускорения толкателя 15 в пределах угла рабочего хода δр кулачка 14 представлен в виде косинусоиды из рис. 84д.
Примечания: 1. Модули зубчатых колес 2и 3 принять равными 5 мм.
2. Число сателлитов планетарного редуктора К=3.
3. Диаграмма угловой скорости ω=f(φ) строится в пределах первого оборота кривошипа 8, считая ω1 нач =0.
 Таблица 84-1
Таблица 84-1| № по пор. | Наименование параметра | Обозн. | Размерн. | Числовое значение | В СИ |
| 1 | Средняя скорость ползуна | Vcp | м/сек | 0,52 | 0,52 |
| 2 | Отношение длины шатуна к длине кривошипа | lAB/lOA | - | 3,5 | 3,5 |
| 3 | Отношение расстояния центра тяжести шатуна от точки А к длине шатуна | lAS2/lAB | - | 0,45 | 0,45 |
| 4 | Скорость вращения электродвигателя без нагрузки | n | об/мин | 1440 | 24 с-1 |
| 5 | Сила тяжести шатуна | G2 | кгс | 45 | 450 Н |
| 6 | Сила тяжести ползуна | G3 | кгс | 65 | 650 Н |
| 7 | Момент инерции шатуна относительно оси, проходящей через его центр тяжести | I2S | кгс∙м∙сек2 | 0,9 | 9кг∙м2 |
| 8 | Усилие вытяжки | Pa max | кгс | 350 | 3500Н |
| 9 | Движущий момент на валу кривошипа | Mдпр п.а. | кгс∙м | 25 | 250Н∙м |
| 10 | Сумма моментов инерции вращающихся звеньев ротора, зубчатых колес, насоса, маховика, приведенных к валу кривошипа | Iпрвр | кгс∙м∙сек2 | 2 | 20кг∙м2 |
| 11 | Угловая координата кривошипа для силового расчета (от вертикали) | φ1 | град | 60 | 60 |
| 12 | Число зубьев колес 2 и 5 | z2/z3 | - | 11/18 | 11/18 |
| 13 | Угол рабочего профиля кулачка | δp | град | 180 | 180 |
| 14 | Ход толкателя кулачка | h | м | 0,075 | 0,075 |
| 15 | Максимальный допустимый угол давления | αдоп | град | 30 | 30 |
| 16 | Скорость вращения крвошипа 8 | n8 | об/мин | 50 | 0,83 с-1 |
Чертежи
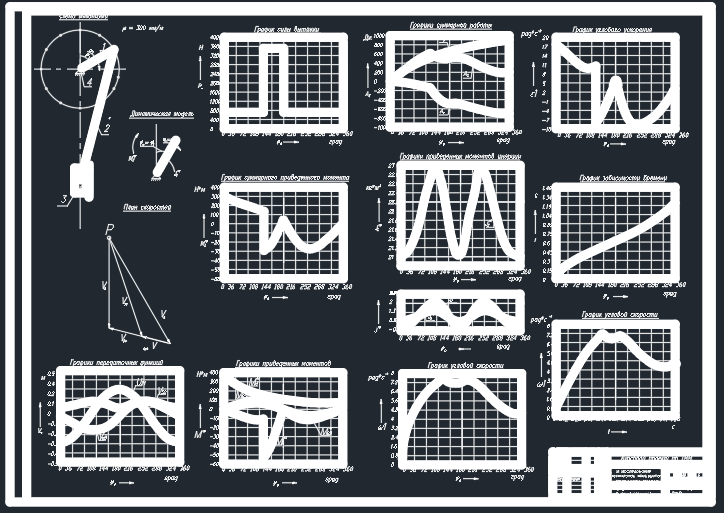
Лист 1 - Определение закона движения ![]()
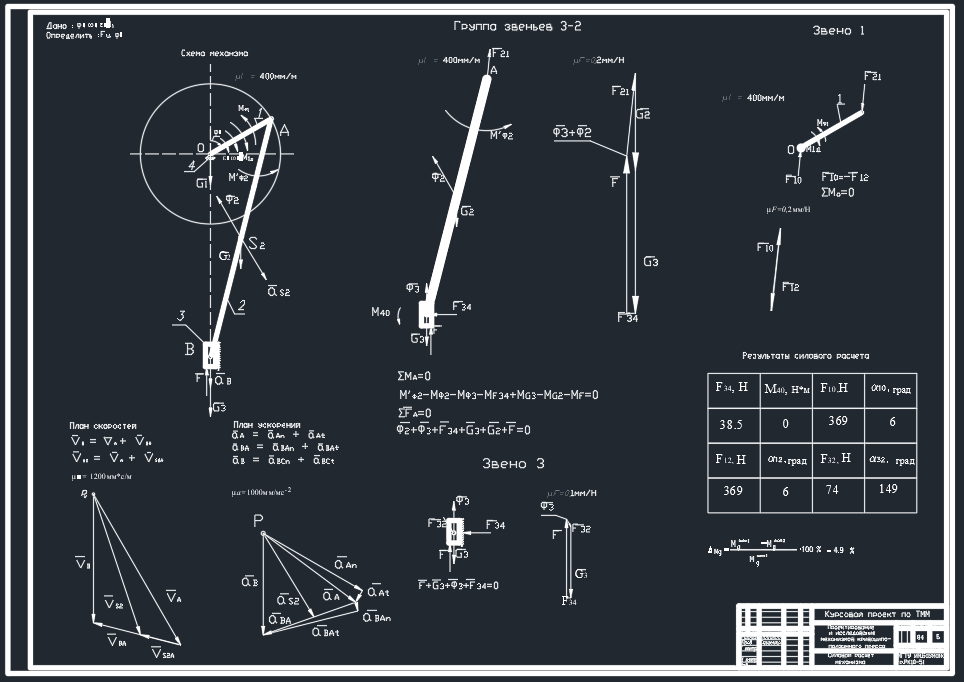
Лист 2 - Силовой расчет ![]()
Лист 3 - Проектирование зубчатой передачи ![]()

Лист 4 - Проектирование кулачкового механизма ![]()

Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
756
Качество
Идеальное компьютерное
Размер
963,63 Kb
Список файлов
Лист 1.dwg
Лист 2.dwg
Лист 3.dwg
Лист 4.dwg
РПЗ.doc

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc-help
stud-msc-help
18 ноября 2015 в 18:17
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
Отзывы на другие работы автора
Отзыв
Проектирование и исследование механизмов четырехтактного двигателя внутреннего сгорания
Есть множество недочетов, пришлось много исправлять. Но очень помогло, что многие расчеты очень подробно расписаны.
Отзыв
Построение эпюр внутренних силовых факторов
Все сделано качественно. Особо удобно, что решение напечатано, а не написано от руки.

Отзыв
Расчет соединений
Очень здорово, всё понятно, даже человеку, пропустившему разбор этих тем. Подписаны страницы - источники по методичке. Суперски помогло в выполнении собственного варианта.
Отзыв
Исследование характеристик искусственного освещения
норма освещенности для ламп странная, по моей информации она должна быть одинаковая, так как устанавливается для человека, для сверки правильности своих мыслей пойдет, но есть нюансы

Отзыв
6 Задач
Полезно, жаль что купил когда уже половину сделал, времени бы сэкономилось