Ответы к экзамену: Шпаргалки к экзамену
Описание
| № шпоры | Вопросы |
| 1 | 1. Общие вопросы проектирования - понятия проектирование и проект, основные этапы процесса проектирования, методы проектирования. 2. Структура механизмов. Элементы механизма и отношения между ними. Связи и подвижности в механизме. Виды кинематических цепей. Избыточные связи и местные подвижности. 3. Структура механизмов - виды простейших типовых механизмов и их элементы, кинематические пары и их классификация. |
| 2 | 4. Структурный синтез и анализ рычажных механизмов с низшими кинематическими парами по Ассуру. Первичный механизм и группы Ассура. Класс и порядок механизма. 5. Кинематика механизмов - передаточные функции и кинематические характеристики механизма. Вывод уравнений связи первой и второй передаточных функций со скоростями и ускорениями. 6. Кинематика механизмов - формулировка прямой и обратной задач кинематики, методы решения задач кинематики. 8. Кинематика механизмов - кинематическое исследование кулачковых механизмов, методы кинематических диаграмм и заменяющих рычажных механизмов. 9. Метод преобразования координат при кинематическом исследовании рычажных механизмов. |
| 3 | 10. Силовой расчет механизмов - постановка задачи силового расчета, определение числа неизвестных, особенности статического силового расчета. 11. Динамика одноподвижного машинного агрегата - цели и задачи силового расчета механизмов, методы силового расчета, применение метода кинетостатики для силового расчета механизмов. 12. Динамика механизмов - силы, действующие в механизмах, и их классификация, силы в кинематических парах плоских механизмов без учета трения. |
| 4 | 13. Динамические модели одноподвижных механизмов. Условие приведения сил и моментов, вывод формулы для расчета М прS. 14. Динамические модели одноподвижных машинных агрегатов. Условия приведения масс и моментов инерции. Вывод формулы для расчета суммарного приведенного момента инерции Iпр S . 15. Динамика одноподвижного машинного агрегата - уравнения движения механической системы и ее динамической модели в энергетической форме. |
| 5 | 16. Динамика одноподвижного машинного агрегата - уравнение движения машинного агрегата в дифференциальной форме. 18. Механические характеристики типовых двигателей и рабочих машин (д.в.с., асинхронный электродвигатель, электродвигатель постоянного тока с независимым возбуждением, компрессор, насос и др.). 19. Режим работы машинного агрегата "пуск-останов". Управление конечным положением объекта - жесткий и мягкий удары при останове, безударный останов, удержание объекта в конечном состоянии (кинематические и энергетические условия). |
| 6 | 21. Динамика одноподвижного машинного агрегата - определение закона движения начального звена и времени цикла при неустановившемся режиме работы. 22. Динамика одноподвижного машинного агрегата - алгоритм определения зависимости e1= f ( j1 ) при неустановившемся режиме работы. 23. Методы регулирования неравномерности хода машинного агрегата. Понятие о коэффициенте неравномерности d . Устойчивость работы машинного агрегата с приводом от асинхронного электродвигателя. |
| 7 | 24. Динамика одноподвижного машинного агрегата - алгоритм определения закона движения при установившемся режиме движения. 25. Динамика одноподвижного машинного агрегата - регулирование хода машины с помощью маховика. Алгоритм расчета дополнительной маховой массы по методу Н.И. Мерцалова. 26. Учет условий передачи сил при метрическом синтезе рычажных механизмов. Понятие об угле давления. Методы учета угла давления J при синтезе механизмов (на примере кривошипно-ползунного механизма). |
| 8 | 27. Коэффициент неравномерности средней скорости kw . Метрический синтез типовых рычажных механизмов по заданному коэффициенту kw (на примере четырехшарнирного механизма). 28. Метрический синтез кривошипно-ползунного механизма по трем положениям выходного звена S31 , S32 и S33 , соответствующим углам поворота кривошипа (j2 - j1) и (j3 - j1) и эксцентриситету e . |
| 9 | 29. Метрический синтез четырехшарнирного механизма по трем положениям выходного звена g31, g32 и g33 , соответствующими углам поворота кривошипа (j2- j1) и (j3-j1) и размерам l3 и l4. 30. Оптимальный синтез механизмов - основные критерии оптимальности механизма, целевая функция и ее формирование при синтезе механизмов. 31. Метрический синтез рычажных механизмов - синтез кривошипно-ползунного механизма по средней скорости VCср , допустимому углу давления [ J ] и средней частоте вращения кривошипа w1ср. |
| 10 | 32. Виброзащита в механизмах и машинах. Методы защиты машин от внешних вибраций. Виброизоляция и динамическое гашение. 33. Виброзащита механизмов - взаимодействие двух материальных тел без виброизоляции и при установке между ними линейного виброизолятора. 34. Полное статическое уравновешивание кривошипно-ползунного механизма. 17. Динамика одноподвижного машинного агрегата - режимы работы машинного агрегата, их основные кинематические и энергетические характеристики. |
| 11 | 35. Статическое уравновешивание рычажных механизмов - уравновешивание вертикальной составляющей сил инерции в горизонтальном кривошипно-ползунном механизме. 36. Балансировка роторов - понятие о неуравновешенности ротора, виды неуравновешенности роторов и способы их устранения. |
| 12 | 37. Балансировка роторов - балансировка ротора на рамном балансировочном станке системы Шитикова по методу трех пусков. 38. Общая теория высшей пары - основная теорема плоского зацепления (вывод, формулировка при синтезе и анализе). |
| 13 | 39. Общая теория высшей пары - скорость скольжения в высшей паре ( 1-е следствие основной теоремы зацепления ). Скорость скольжения при внешнем и внутреннем зацеплении. 40. Плоский кулачковый механизм с поступательно движущимся толкателем - вывод формулы для расчета угла давления. 41. Эвольвента окружности и ее свойства. Вывод параметрических уравнений эвольвенты. 48. Эвольвентная зубчатая передача - вывод формулы для расчета межосевого расстояния aw . |
| 14 | 42. Эвольвентное зубчатое колесо и его элементы - вывод расчетных формул для окружных шагов p и py , радиусов делительной r и основной rb окружностей. 44. Эвольвентное зубчатое колесо - вывод формулы для расчета толщины зуба по окружности произвольного радиуса sy , понятие о заострении зуба. |
| 15 | 43. Станочное эвольвентное зацепление - подрезание зубьев инструментом с реечным производящим контуром. Вывод формул для расчета Zmin и xmin. |
| 16 | 45. Станочное эвольвентное зацепление - вывод формул для расчета радиусов вершин ra и впадин rf, высоты зуба h , толщины зуба по дуге делительной окружности s . Классификация зубчатых колес в зависимости от коэффициента изменения толщины зуба D. 46. Эвольвентная зубчатая передача - эвольвентное зацепление и его свойства. 47. Эвольвентная зубчатая передача - основное уравнение беззазорного звольвентного зацепления ( вывод формулы для расчета inv aw ). |
| 17 | 49. Эвольвентная зубчатая передача - уравнительное смещение Dy. Два способа расчета геометрии эвольвентного зацепления. Вывод формулы для расчета коэффициента уравнительного смещения. 50. Эвольвентная зубчатая передача - воспринимаемое смещение. Классификация эвольвентных зубчатых передач. Вывод формулы для расчета коэффициента воспринимаемого смещения y. 51. Эвольвентная зубчатая передача - коэффициент торцевого перекрытия. Вывод формулы для расчета коэффициента торцевого перекрытия ea. |
| 18 | 52. Эвольвентная зубчатая передача - качественные показатели, понятие о блокирующем контуре, выбор оптимального сочетания коэффициентов смещения x1 и x2. 53. Типовые механизмы с высшими парами - структурные схемы, основные преимущества и недостатки, области применения. Методы повышения нагрузочной способности при проектировании. |
| 19 | 54. Коническая зубчатая передача - основные преимущества и недостатки, передаточное отношение, расчет геометрии зацепления по методу дополнительных конусов. 55. Червячная зубчатая передача - основные преимущества и недостатки, формула для расчета передаточного отношения, виды червяков. |
| 20 | 56. Зубчатая передача с зацеплением Новикова - особенности геометрии и кинематики зацепления, основные преимущества и недостатки. 57. Кинематика сложного рядного зубчатого механизма. Вывод формулы для расчета передаточного отношения двухступенчатого редуктора (графическим и аналитическим методами). |
| 21 | 58. Кинематика планетарных механизмов - вывод формулы Виллиса для четырехзвенного планетарного механизма (методом инверсии или обращенного движения). 59. Кинематика планетарных механизмов - вывод формул для расчета передаточного отношения двухрядного планетарного механизма (графическим и аналитическим методами). |
| 22 | 60. Синтез типовых планетарных механизмов - вывод условия сборки для двухрядного планетарного механизма с числом сателлитов k > 2. 61. Синтез типовых планетарных механизмов - подбор чисел зубьев в двухрядном планетарном механизме методом сомножителей. 62. Синтез типовых планетарных механизмов - условия, которые необходимо выполнить при подборе чисел зубьев. |
| 23 | 63. Синтез типовых планетарных механизмов - вывод расчетных зависимостей для проверки условий соседства и сборки многопоточных (k > 1) двухрядных механизмов (на примере механизма с одним внешним и одним внутренним зацеплением). 64. Плоский кулачковый механизм - области применения, основные преимущества и недостатки. Угол давления, заклинивание и подрезание в кулачковых механизмах. |
| 24 | 65. Плоский кулачковый механизм - основные параметры, циклограмма работы кулачкового механизма, типовые законы движения толкателя. 66. Построение центрового и конструктивного профилей кулачка при проектировании графическим методом (для механизма с качающимся толкателем). |
| 25 | 67. Метрический синтез плоского кулачкового механизма с поступательно движущимся толкателем - определение радиуса начальной шайбы ro , радиуса ролика rр и эксцентриситета e . 68. Построение центрового и конструктивного профилей кулачка при проектировании графическим методом ( для механизма с внеосным поступательно движущимся толкателем ). 70. Построение центрового и конструктивного профилей кулачка при проектировании графическим методом (для механизма с внеосным e ¹ 0 поступательно движущимся толкателем). |
| 26 | 71. Силы в кинематических парах механизмов - учет трения при силовом расчете механизмов. Виды трения. 72. К.п.д. механической системы - к.п.д. одноподвижного механизма, к.п.д. системы механизмов при последовательном и параллельном соединении, экспериментальное определение к.п.д. редуктора. |
| 27 | 73. Промышленные роботы и манипуляторы - классификация, области применения, основные геометро-кинематические характеристики (понятия рабочей зоны и зоны обслуживания), особенности структуры манипуляторов, маневренность. 74. Волновая зубчатая передача - основные преимущества и недостатки, особенности кинематики, формулы для расчета передаточного отношения, подходы к расчету геометрии зацепления, понятие об условном колесе. |
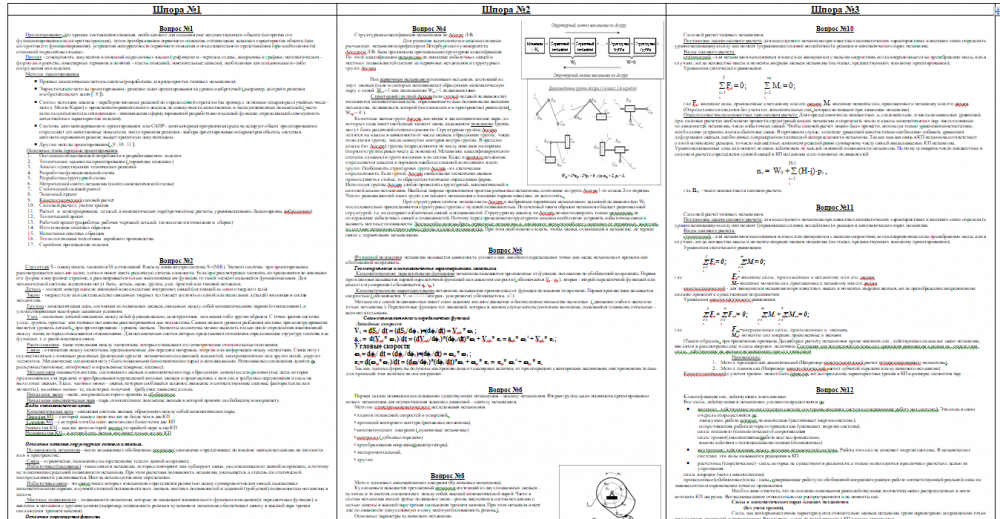
Образец ![]()
Характеристики ответов (шпаргалок) к экзамену
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Просмотров
2686
Качество
Идеальное компьютерное
Размер
1,33 Mb
Список файлов
Шпаргалки к экзамену.docx
Вам все понравилось? Получите кэшбэк - 40 рублей на Ваш счёт при покупке. Поставьте оценку и напишите положительный комментарий к купленному файлу. После Вы получите деньги на ваш счет.
 polosatik
polosatik
02 июня 2015 в 22:44
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!