Курсовая работа: Юстировочный МР-привод сегмента зеркала
Описание
Чертежи только PDF
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
Система управления и измерения перемещений юстировочного МР-привода
Москва 2002
ЗАДАНИЕ
на курсовой проект по системам автоматического управления оборудования электронных технологий.
Тема проекта: Система управления и измерения перемещений юстировочного МР-привода
1. Проработать описание работы машины, выбрать и обосновать состав его основных целевых функций, сервисных функций, функций отработки аварий.
2. Разработать комплексную принципиальную схему, как совокупность системы целевых механизмов, системы их энергообеспечения и системы управления, связанных материальными, энергетическими и информационными потоками.
3. Описать механический, энергетический и информационный интерфейс компонентов стенда.
Содержание графической части.
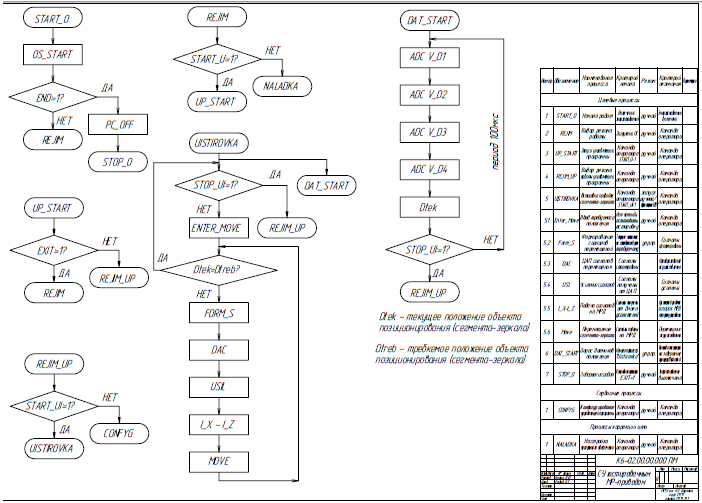
- Процессная модель машины..................................................1 л.
- Комплексная принципиальная схема....................................2 л.
- Комплексная электрическая схема........................................1 л.
Содержание расчетно-пояснительной записки.
- Введение.
- Описание процессной модели. Выбор и обоснование целевых, сервисных функций, и функций коррекции цели.
- Описание комплексной принципиальной схемы.
- Технические задания на элементы и узлы машины.
- Расчет и описание схемы.
- Заключение.
Оглавление
Описание процессной модели...................................................................................8
Описание комплексной принципиальной схемы........................................... 13
Техническое задание на оригинальные элементы и узлы машины.................14
Выбор стандартных компонентов...........................................................................16
Расчет схем..................................................................................................................26
Заключение..................................................................................................................29
Список литературы....................................................................................................30
Аннотация
Целью данного курсового проекта является овладение навыками, методами и средствами комплексных разработок механических и электронных компонентов оборудования САУ.
Задачи проекта состоят в:
- распределении функций машины между различными компонентами и обоснование этих функций;
- постановке четких технических заданий перед разработчиками отдельных компонентов;
- выполнении технической документации на электронные компоненты.
В проекте разрабатана система управления экспериментальной установкой по исследованию точностных и динамических характеристик юстировочного привода элементарного зеркала –сегмента большого астрономического телескопа.
Курсовой проект выполнен в следующем объеме: процессная модель (алгоритм работы установки и таблицу процессов), комплексная принципиальная схема (механика и энергообеспечение системы автоматического управления), электрические схемы усилителя сигнала ЦАП и блока питания на стабилизированное напряжения ±15В и 5В. В расчетно-пояснительной записке приведены необходимые пояснения и отражены принципы построения САУ установки, даны расчеты и описания.
Введение
Магнитореологический привод разрабатывается для юстировки элементарных сегментов составного главного зеркала большого астрономического телескопа с адаптивной оптикой, типа АСТ.
Привод должен отвечать высоким требованиям по точности позиционирования элементарных зеркал (погрешность не более 50 нм) и по быстродействию (постоянная времени привода не более 100 мс), которые обусловлены необходимостью многократных перемещений и точных позиционирований в процессе функционирования. СГЗ (диаметр до 25 м) таких телескопов состоит из большого числа отдельных оптических элементов (например 612), что приводит к необходимости автоматического поддержания их как общей поверхности, кроме этого необходима функция коррекции искажения волнового фронта в реальном времени.
Быстродействие требует от привода устойчивости - быстрого затухания переходных процессов в режиме точного позиционирования при высокой скорости самих процессов. Для обеспечения нанометровой точности перемещения, миллисекундного быстродействия привода необходимо решить комплекс задач, связанных с разработкой быстродействующей системы автоматического управления. Элемент СГЗ представляет собой шестиугольный сегмент с диаметром вписанной окружности 1 м, выполненный с пятикратным облегчением (вес менее 100 кг) из перспективных конструкционных материалов. В соответствии с концепций построения телескопов типа АСТ, каждый элемент СГЗ, подвешен в общей оправе с возможностью поворота вокруг центра массы в двух взаимно перпендикулярных плоскостях и линейного перемещения вдоль оси. Это обеспечивается узлом упругой подвески, и соответствующим юстировочным приводом.
Требования к юстировочному приводу:
Диапазон перемещений до 10 мм
Погрешность позиционирования £50 нм
Быстродействие (постоянная времени) £200 мс
Воспроизводимость перемещений высокая
Малая величина гистерезиса при
реверсивном движении привода (менее 20%);
Передаваемое усилие до 120 кг.
Принцип работы юстировочного привода основан на изменении динамической вязкости магнитореологической суспензии. МР-суспензия – это дисперсная физико-механическая система, которая состоит не менее чем из двух фаз, разделенных сильно развитой поверхностью, где одна из фаз (дисперсная) распределена в виде частиц с размерами 10…10 мм в другой непрерывно фазе (дисперсионной). В качестве дисперсионной фазы для МР-суспензии используются микрочастицы Fe, CrO2 или других магнитомягких материалов. Механизмы изменения динамической вязкости при МР-эффектах объясняются процессами структурирования рабочей жидкости. При структурировании происходит ориентация (поворот) частиц дисперсной фазы (доменов или диполей) вдоль силовых линий магнитного или электрического полей и их перемещение в сторону наибольшей напряжённости поля.
Схема юстировочного МР-привода.
1 – сегмент зеркала; 2 – узел упругой подвески; 3- гидроцилиндры; 4 –подвижный корпус; 5 – тяги; 6 – гидростанция.
Рабочая жидкость – поступает при помощи гидростанции 6 в корпусную деталь 4, в которой осуществляется разводка жидкости по шести гидроцилиндрам 3. Регулирование перепада давления во встречных гидроцилиндрах осуществляется с помощью дросселирования потока рабочей жидкости, по принципу описанному выше.
Под действием перепада давлений сильфон гидроцилиндра деформируется и вызывает перемещение штока, который в свою очередь через корпус 4 и тяги 5 передает тяговое усилие на сегмент зеркала 1. Наличие шести гидроцилиндров (по два на каждую координату) позволяет осуществлять все требуемые перемещения сегмента зеркала 1.
Рис. 1.2.2. Сильфонный гидроцилиндр.
1 – корпус; 2 – сильфонный узел; 3 – шток; 4 – входной дроссель;
5 – выходной дроссель; 6 – камера давления, заполненная рабочей жидкостью.
Сегмент зеркала совершает перемещения относительно узла упругой подвески. В узле главной частью является упругая мембрана, которая и позволяет перемещаться по трём осям. Упругий шарнир служит приспособлением для установки инерционных объектов (зеркал). Основание следящего трёхкоординатного МР-привода жёстко крепиться к полу, чтобы исключить всевозможные смещения МР-привода во время его работы.
Характеристики курсовой работы
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСписок файлов

Начать зарабатывать
 zzyxel
zzyxel


















