Курсовая работа 137: Проектирование и исследование механизмов питателя с двойной качающейся кулисой и электроприводом вариант А
-50%
Описание
Проектирование и исследование механизмов питателя с двойной качающейся кулисой и электроприводом
Содержание курсового проекта
- 1. Техническое задание
- 1.1 Краткое описание работы механизмов
- 1.2 Исходные данные
- 1.3 Содержание курсового проекта
- 2. Проектирование основного рычажного механизма и определение закона движения его начального звена.
- 2.1 Проектирование кинематической схемы рычажного механизма (определение геометрических параметров рычажного механизма)
- 2.2 Выбор динамической модели и вывод формул приведения
- 2.3 Определение требуемых кинематических передаточных функций скоростей (аналогов скоростей) графическим и аналитическим методами
- 2.4 Приведение масс и построение графика JIIпр(φ1)
- 2.5 Анализ и расчет активных сил, действующих на звенья механизма
- 2.6 Приведение сил и построение графиков приведенных моментов сил и приведенной механической характеристики электродвигателя
- 2.7 Построение графика МΣпр(φ1)
- 2.8 Построение графика суммарной работы АΣ(φ1)
- 2.9 Построение графика Т(φ1*)
- 2.10 Построение графика ТII(φ1)
- 2.11 Построение графика Т1(φ1*)
- 2.12 Определение приведенного момента инерции звеньев I группы
- 2.13 Определение момента инерции маховика
- 2.14 Построение графика изменения угловой скорости начального звена ω1(φ1**)
- 2.15 Построение приведенной характеристики электродвигателя
- 2.16 Уточнение графиков Мδпр(φ1) и МΣпр(φ1)
- 3. Силовой расчет рычажного механизма
- 3.1 Исходные данные
- 3.2 Определение ускорений центров масс и угловых ускорений звеньев
- 3.3 Определение главных векторов сил инерции и главных моментов сил инерции
- 3.4 Определение усилий в кинематических парах
- 3.5 Определение неизвестной внешней силы
- 3.6 Построение годографов сил
- 4. Проектирование зубчатой передачи
- 4.1 Исходные данные
- 4.2 Последовательность расчета зубчатой передачи
- 4.3 Выбор коэффициента смещения х1 с учетом качественных показателей работы зубчатой передачи
- 4.4 Результаты расчета зубчатой передачи
- 5. Проектирование планетарного редуктора
- 5.1 Исходные данные
- 5.2 Условия, которым должны удовлетворять числа зубьев колес редуктора
- 5.3 Подбор чисел зубьев методом сомножителей
- 5.4 Графическая проверка передаточного отношения редуктора
- 6. Проектирование кулачкового механизма
- 6.1 Исходные данные
- 6.2 Построение кинематических диаграмм и расчет масштабов построения
- 6.3 Построение диаграммы νqB(SB)
- 6.4 Построение области допустимого расположения центра вращения кулачка
- 6.5 Выбор положения центра вращения кулачка и определение основных размеров кулачкового механизма
- 6.6 Построение центрового и конструктивного профилей кулачка и кинематической схемы кулачкового механизма
- 6.7 Построение графиков изменения углов давления
1.1 Краткое описание работы механизмов
Питатель предназначен для транспортирования дозированных порций сыпучих материалов. Исполнительное звено 5 совершает возвратно-поступательное движение. В начале рабочего хода гранулы насыпной массы из бункера попадают в лоток, несколько уплотняются и порциями поступают в емкости для упаковки. Перемещение звена 5 в лотке 6 обеспечивается шестизвенным рычажным механизмом, который состоит из кривошипа 1, угловой качающейся кулисы 3-3’, кулисных втулок (камней) 2 и 4. Привод питателя состоит из электродвигателя Д, планетарного редуктора z1-z23-z4-H и зубчатой передачи 7-8-8’ с числами зубьев z7-z8=z8’. При ходе звена 5 влево насыпная масса уплотняется на участке cbd, что сопровождается линейным изменением силы сопротивления до значения F5α в положении поршня α. При дальнейшем перемещении звена 5 от b до α насыпная масса уплотняется по линейному закону. Сила сопротивления звена 5 в положении поршня α равна F5max. В крайнем левом положении масса ссыпается в емкость. Выталкивание массы осуществляется толкателем 13 с пружиной, коромыслом 9 с роликом 11 и кулачком 10.Исходные данные представлены в таблице.
Ход звена 5 Н5=1,2 l1; CD=AB+AC+0,03м; CF=(h/cos φ3)+0,03.
Массы звеньев mi=ρili; m5=m3+m3’+3кг. Момент инерции масс звеньев относительно оси, проходящей через их центр масс, Isi=0,08mili2; центр масс коромысла KGN лежит посередине lKN; масса коромысла с роликом mk=ρilKN+3кг.
![]() 1.2 Исходные данные
1.2 Исходные данные
 1.2 Исходные данные
1.2 Исходные данные| Наименование задачи | Обозначение | Числовые значения | |
| величины | единицы | ||
| Средняя скорость звена 5 | Vср | м/с | 0,95 |
| Коэффициент изменения скорости звена 5 | kv | - | 1,88 |
| Отношение длины стойки lAC к ходу Н5 звена 5 | lAC/H5 | - | 2,55 |
| Смещение направляющей звена 5 относительно оси вращения кулисы С | е5 | м | 0,5 |
| Максимальная сила сопротивления | F5max | кН | 6,620 |
| Минимальная сила сопротивления | F5min | кН | 0,6 |
| Соотношение сил при уплотнении | F5d / F5max | - | 0.8 |
| Соотношение между длиной участка bc и ходом Н5 | Lbc/H5 | - | 0,2 |
| Линейная плотность материала | q | кг/м | 29 |
| Сила сопротивления перемещению толкателя 13 | Fс13 | кН | 0,3 |
| Синхронная частота вращения электродвигателя | nc | об/мин | 750 |
| Числа зубьев колес 7 и 8 | z7 z8 | | 16 19 |
| Угол наклона линии зуба | β | градус | 30 |
| Модуль зубчатых колес 7 и 8 | m | мм | 4 |
| Передаточное отношение планетарного редуктора | u1H | - | 11 |
| Число сателлитов в планетарном редукторе | k | шт. | 3 |
| Модуль зубчатых колес редуктора | mp | мм | 3 |
| Ход толкателя 13 | h13 | м | 0,14 |
| Максимально допустимый угол давления в кулачковом механизме | υдоп | градус | 45 |
| Угол рабочего профиля кулачка | φр | градус | 126 |
| Угловая координата кривошипа для силового расчета | φ1 | градус | 30 |
| Коэффициент ускорения толкателя | k1 | - | 0,3 |
| Коэффициент неравномерности вращения кривошипа | δ | - | 1/40 |
| Приведенный к звену 1 момент инерции зубчатых колес редуктора и передачи | Jпрз.к | кгּм2 | 1,08 |
| Смещение оси G толкателя 9 | еg | м | 0,10 |
Заключение
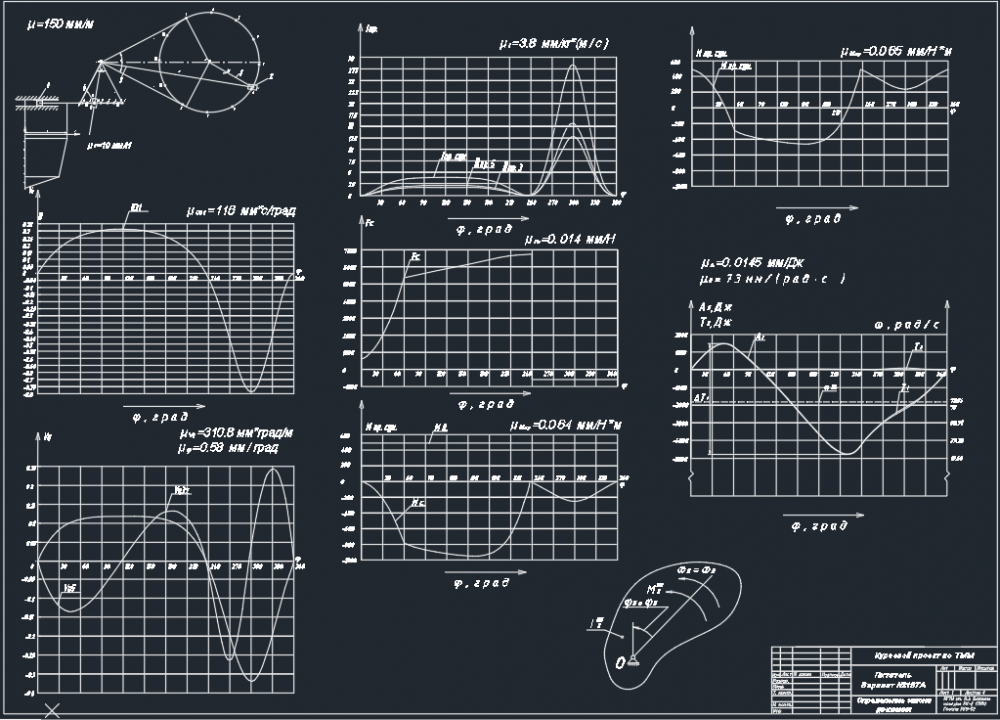
В ходе выполнения курсового проекта получены следующие результаты:- Определен закон движения звена приведения механизма поперечно-строгального станка с качающейся кулисой и рассчитана дополнительная маховая масса, обеспечивающая коэффициент неравномерности кривошипа. Габариты маховика позволяют установить его на кривошипный вал.
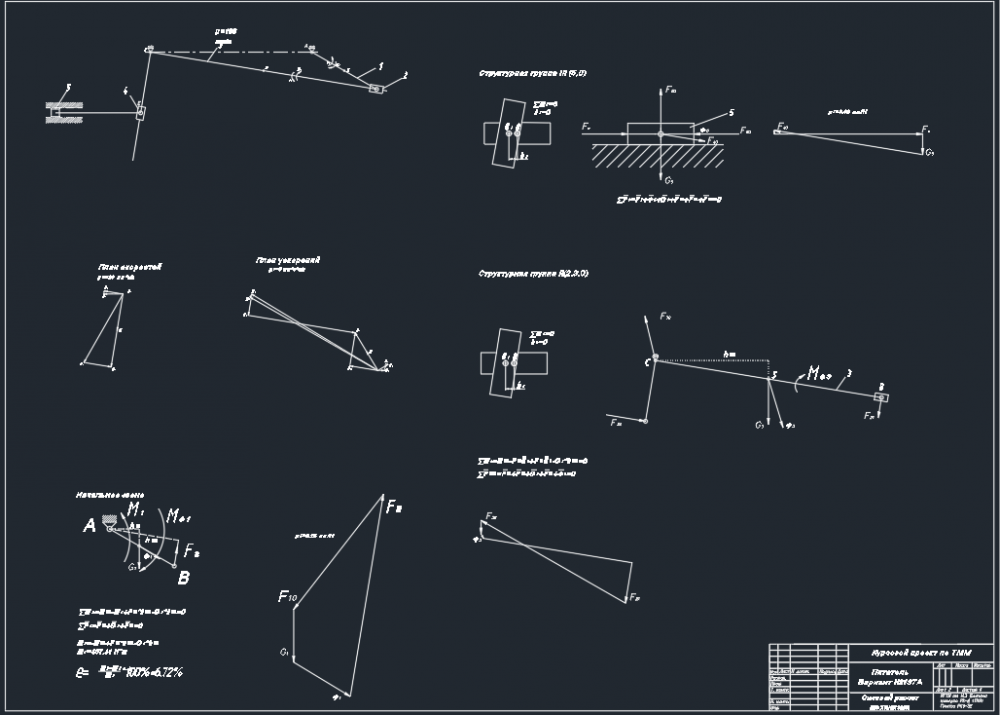
- Для заданного положения механизма φ1 = 30 град проведен силовой расчет, определены реакции в кинематических парах механизма и движущий момент, величина которого отличается от среднего движущего момента, определенного на первом листе на 9,1%.
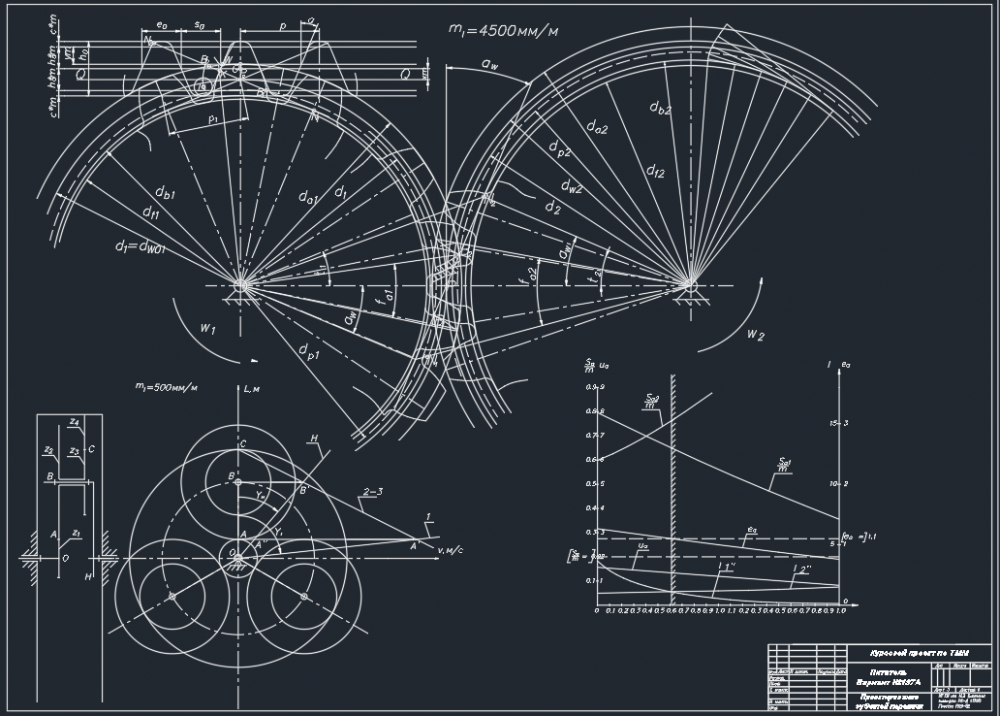
- Спроектирована прямозубая цилиндрическая эвольвентная зубчатая передача с модулем m = 3 мм, с числами зубьев z5=12 и z6=22, коэффициентами смещения х1 = 0.6 и х2 = 0.5, в которой зубья выполнены без подрезания и заострения. Зубчатая передача спроектирована таким образом, что .
- Спроектирован двухрядный планетарный редуктор со смешанным зацеплением с передаточным отношением с числами зубьев колес z1=20, z2=80, z3=25, z4=125.
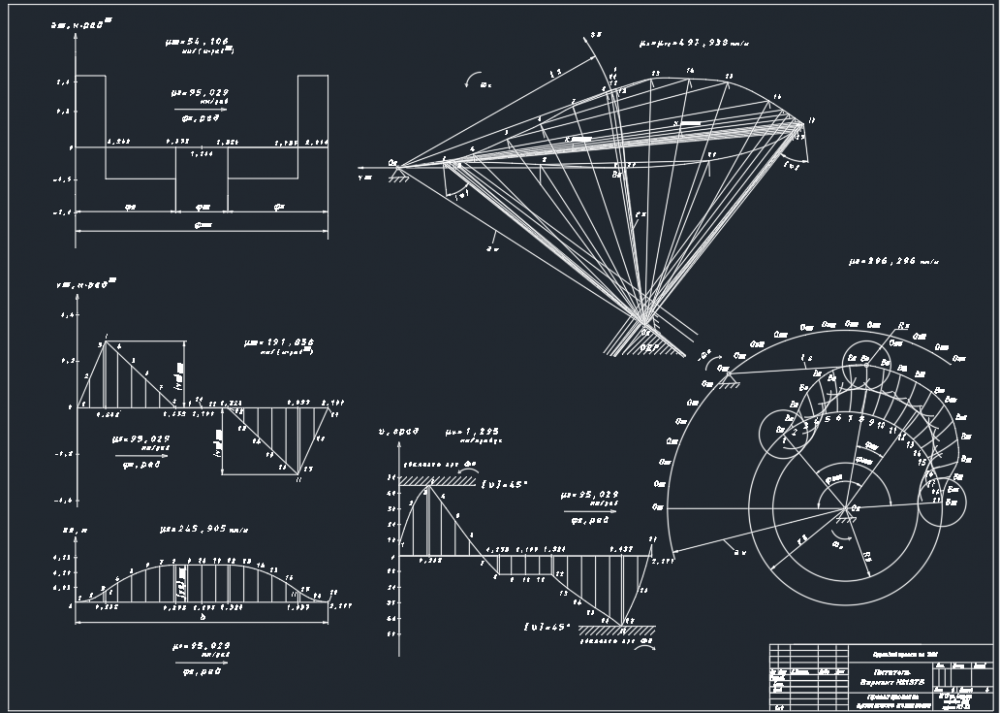
- Спроектирован кулачковый механизм с качающимся толкателем при заданном законе движения выходного звена. Начальный радиус центрового профиля кулачка , радиус ролика .Угол давления кулачка, определяемый по конструктивному профилю, не превышает допустимого .
Чертежи
Лист 1 - Определение закона движения ![]()
Лист 2 - Силовой расчет механизма ![]()
Лист 3 - Проектирование зубчатой передачи ![]()
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Программы
Просмотров
425
Качество
Идеальное компьютерное
Размер
1,46 Mb
Список файлов
РПЗ.doc
Чертежи.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:23
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















