Курсовая работа 73: Проектирование и исследование механизмов управления летательного аппарата с уголковыми соплами вариант Б
Описание
Задание №73 (Б) РПЗ + все 4 листа выполненные в Автокаде, проверен и сдан в 2019г
ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С УГЛОВЫМИ СОПЛАМИ
Курсовой проект был сдан и защищен на отметку Отл. Проект выполнен в версии автокада AutoCAD 2019 (не студенческой), а это значит, что если вы будете открывать тоже с нестуденческой, то баннера "выполнено в студенческой версии автокада" - у вас не будет. Так же имеется оформленная РПЗ. Внизу описания приведены скриншоты листов в автокаде:
![]()
![]()
![]()
![]()
![]()
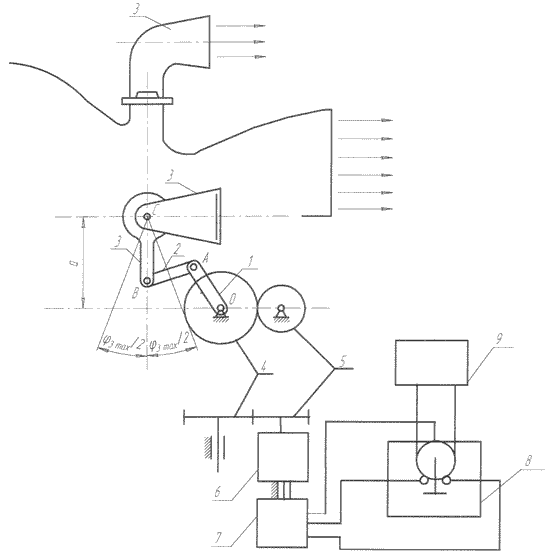
Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление потока и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться.
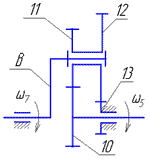
При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону.
Движение от электродвигателя 7 через планетарный рудуктор 6 (схема редуктора изображена на рисунке
![]()
и зубчатые колеса 5,4 передается валу O, на котором закреплено звено I стержневого механизма OABC. Звено I, поворачиваясь на некоторый угол вокруг оси O, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20°
![]()
При повороте уголкового сопла из начального положения I в конечное положение II (рис. б) на угол j3 раб на звено 3 действует момент сопротивления MC3, зависимость которого от угла поворота j3 представлена диаграммой (MC3, j3)
![]()
Данные для построения диаграммы приведены в (табл. а).
В начальном положении механизма приведенный к звену I момент элктродвигателя в 1,7 раза больше приведенного момента сопротивления. Можно принять, что при повороте механизма величина приведенного движущего момента убывает по линейному закону. Электродвигатель должен обеспечить безударный останов уголкового сопла в конечном положении. Выключение электродвигателя происходит в тот момент, когда уголковое сопло (звено 3) повернется на угол
j3=(3/4)j3 раб.
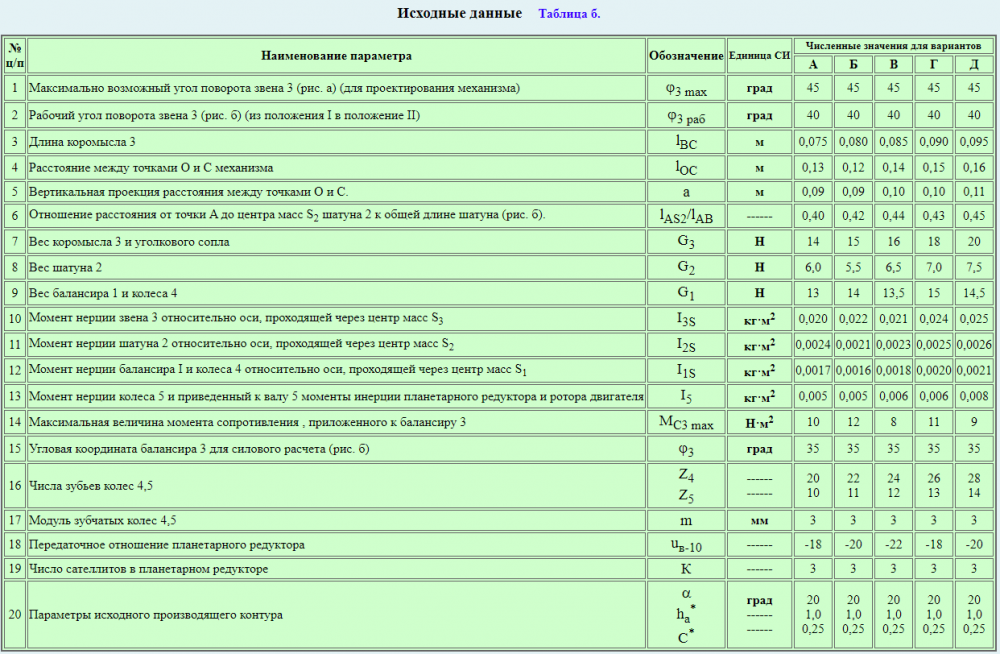
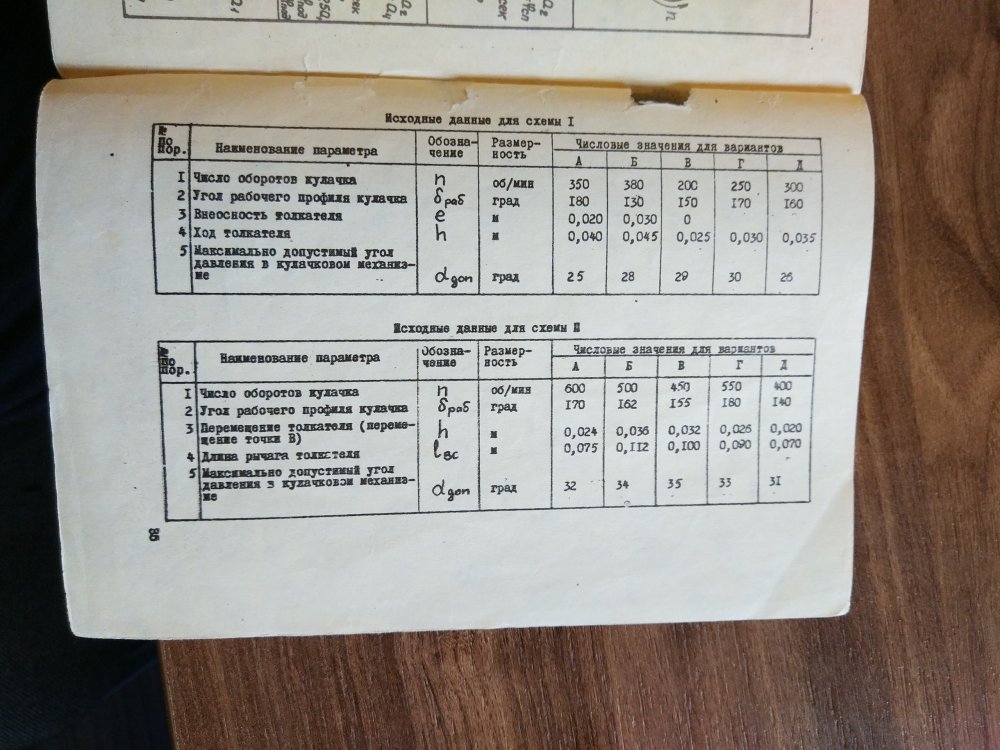
При проектировании и исследовании механизмов управления считать известными параметры, приведенные в табл. б.
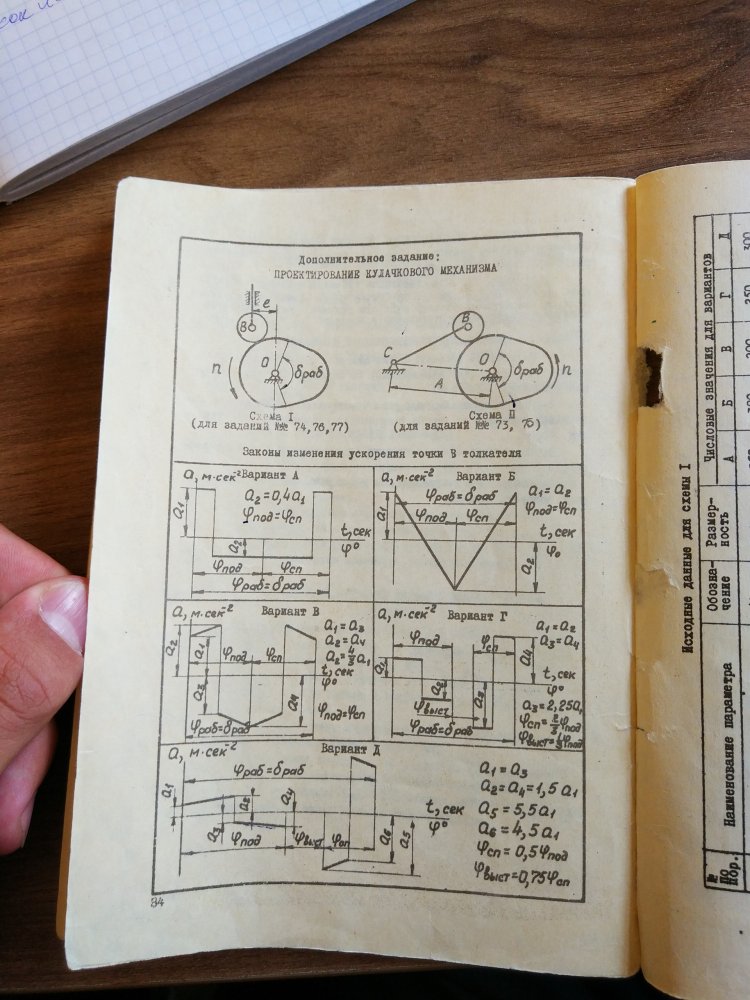
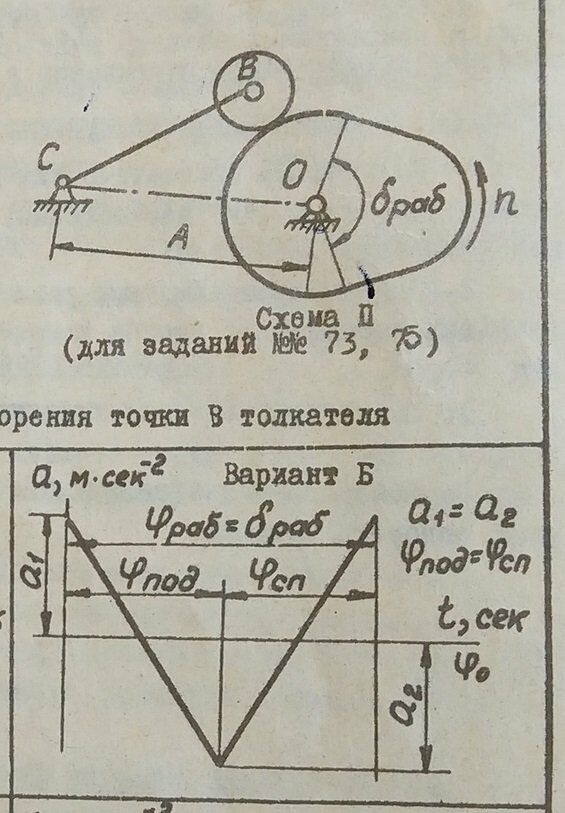
В механизме управления летательного аппарата отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
Примечания: 1.Проектирование основного четырехшарнирного механизма OABC производится по двум крайним (мертвым) положениям механизма по заданному максимальному углу качания коромысла BC (j3 max).
2. При определении закона движения механизма угол j3 раб разделить на 8 равных интервалов.Таблица а.Значение момента сопротивления MC3 в долях от максимального момента МС3 max в зависимости от положения звена 3.
Условие кулочка:
![]()
![]()
![]()
ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ МЕХАНИЗМОВ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С УГЛОВЫМИ СОПЛАМИ
Курсовой проект был сдан и защищен на отметку Отл. Проект выполнен в версии автокада AutoCAD 2019 (не студенческой), а это значит, что если вы будете открывать тоже с нестуденческой, то баннера "выполнено в студенческой версии автокада" - у вас не будет. Так же имеется оформленная РПЗ. Внизу описания приведены скриншоты листов в автокаде:

Поворот подвижной части 3 уголкового сопла относительно неподвижной его части осуществляется с помощью механизмов управления. Направление потока и величина угла поворота каждого из уголковых сопел могут быть различными, благодаря чему траектория полета может значительно меняться.
При необходимости изменения траектории полета соответствующий сигнал подается от автомата управления 9 на источник питания 8 (специальные батареи с устройством переключения полярности) электродвигателя 7. В зависимости от включения источника питания вал электродвигателя начинает вращаться в ту или иную сторону.
Движение от электродвигателя 7 через планетарный рудуктор 6 (схема редуктора изображена на рисунке
и зубчатые колеса 5,4 передается валу O, на котором закреплено звено I стержневого механизма OABC. Звено I, поворачиваясь на некоторый угол вокруг оси O, передает движение через шатун 2 коромыслу 3, которое жестко связано с подвижной частью уголкового сопла. Начальное положение I уголкового сопла характеризуется отклонением звена 3 от нейтрального (вертикального) положения на угол 20°
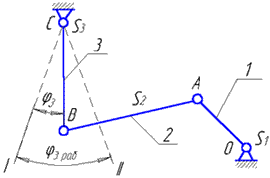
При повороте уголкового сопла из начального положения I в конечное положение II (рис. б) на угол j3 раб на звено 3 действует момент сопротивления MC3, зависимость которого от угла поворота j3 представлена диаграммой (MC3, j3)
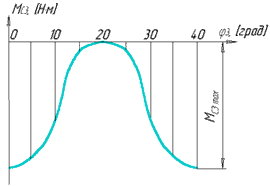
Данные для построения диаграммы приведены в (табл. а).
В начальном положении механизма приведенный к звену I момент элктродвигателя в 1,7 раза больше приведенного момента сопротивления. Можно принять, что при повороте механизма величина приведенного движущего момента убывает по линейному закону. Электродвигатель должен обеспечить безударный останов уголкового сопла в конечном положении. Выключение электродвигателя происходит в тот момент, когда уголковое сопло (звено 3) повернется на угол
j3=(3/4)j3 раб.
При проектировании и исследовании механизмов управления считать известными параметры, приведенные в табл. б.
В механизме управления летательного аппарата отсутствует кулачковый механизм, проектирование которого провести по дополнительному заданию.
Примечания: 1.Проектирование основного четырехшарнирного механизма OABC производится по двум крайним (мертвым) положениям механизма по заданному максимальному углу качания коромысла BC (j3 max).
2. При определении закона движения механизма угол j3 раб разделить на 8 равных интервалов.Таблица а.Значение момента сопротивления MC3 в долях от максимального момента МС3 max в зависимости от положения звена 3.
| j3, град | 0 | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 |
| MC3/MC3 max | 1,00 | 0,85 | 0,47 | 0,13 | 0,00 | 0,13 | 0,47 | 0,85 | 1,00 |
| | | | | | | | | |
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
553
Качество
Идеальное компьютерное
Размер
44,16 Mb
Список файлов
73 б
КУРСАЧ ПО ТММ 2019Г (73Б)
Методы
Архангельская
IMG_0074.jpg
IMG_0075.jpg
IMG_0076.jpg
IMG_0077.jpg
IMG_0078.jpg
IMG_0079.jpg
IMG_0080.jpg
IMG_0081.jpg
IMG_0082.jpg
IMG_0083.jpg
IMG_0084.jpg
IMG_0085.jpg
IMG_0086.jpg
IMG_0087.jpg
IMG_0088.jpg
IMG_0089.jpg
IMG_0090.jpg
IMG_0091.jpg
IMG_0092.jpg
IMG_0093.jpg
IMG_0094.jpg
IMG_0095.jpg
IMG_0096.jpg
IMG_0097.jpg
IMG_0098.jpg
IMG_0099.jpg
IMG_0100.jpg

Ваше экономие времени является моей ГЛАВНОЙ задачей! Если я Вам хоть чуть-чуть помог, пожалуйста, сделайте и мне приятное, оставьте 5 ЗВЁЗД и позитивный комментарий. Большое спасибо!
 EcoTime Inc.
EcoTime Inc.
17 декабря 2019 в 22:51
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!
















