Курсовая работа 111: Проектирование и исследование механизмов кузнечно-прессового манипулятора вариант В
-50%
Описание
Проектирование и исследование механизмов кузнечно-прессового манипулятора
Реферат
В данной расчетно-пояснительной записке проектируется и исследуется механизм кузнечно-прессового манипулятора.В первом разделе записки определяются основные размеры и закон движения исполнительного механизма.
Во втором разделе записки производится силовой расчет исполнительного механизма.
В третьем разделе записки проектируется зубчатая передача и синтезируется планетарный механизм.
В четвертом разделе приводится проектирование кулачкового механизма.
Основные результаты расчетов получены с помощью интегрированной среды MathCad 2000 Pro.
Расчетно-пояснительная записка оформлена на 32-ом листе машинного текста, включает одну таблицу и список использованных литературных источников из 4-х наименований.
Графическая часть отображена на 4-х листах формата А1.
Содержание
| Реферат | Стр. 2 |
| Описание механизма | Стр.4 |
| Исходные данные | Стр.5 |
| 1. Закон движения механизма | Стр.6 |
| 1.1. Синтез кулисного механизма | Стр.6 |
| 1.2. Синтез 4-шарнирного механизма по трем положениям звеньев | Стр. 6 |
| 1.3. Выбор закона движения | Стр. 7 |
| 1.4. Построение графиков приведенных моментов | Стр. 7 |
| 1.5. Построение графика суммарного приведенного момента | Стр. 7 |
| 1.6. Построение графика суммарной работы | Стр. 8 |
| 1.7 Построение графика приведенного момента инерции | Стр. 8 |
| 1.8 Построение графика угловой скорости от угла | Стр. 8 |
| 1.9 Построение графика зависимости времени от угла | Стр. 8 |
| 1.10 Построение графика зависимости углового ускорения от угла | Стр. 9 |
| 1.11 Построение графика зависимости угловой скорости от времени | Стр. 9 |
| 2. Силовой расчет | Стр. 10 |
| 2.1. Построение планов скоростей и ускорений | Стр. 10 |
| 2.2. Силы инерции и момент инерции звеньев и сила тяжести звеньев | Стр. 10 |
| 2.3. Определение реакций в кинематических парах | Стр. 10 |
| 2.4. Анализ результатов | Стр. 13 |
| 3. Расчет зубчатой передачи и планетарного механизма | Стр. 14 |
| 3.1. Расчет зубчатой передачи | Стр. 14 |
| 3.2. Расчет основных геометрических параметров зубчатой передачи | Стр. 14 |
| 3.3. Проектирование планетарной зубчатой передачи | Стр. 17 |
| 4. Проектирование кулачкового механизма | Стр. 20 |
| Приложения | Стр. 21 |
Описание механизма
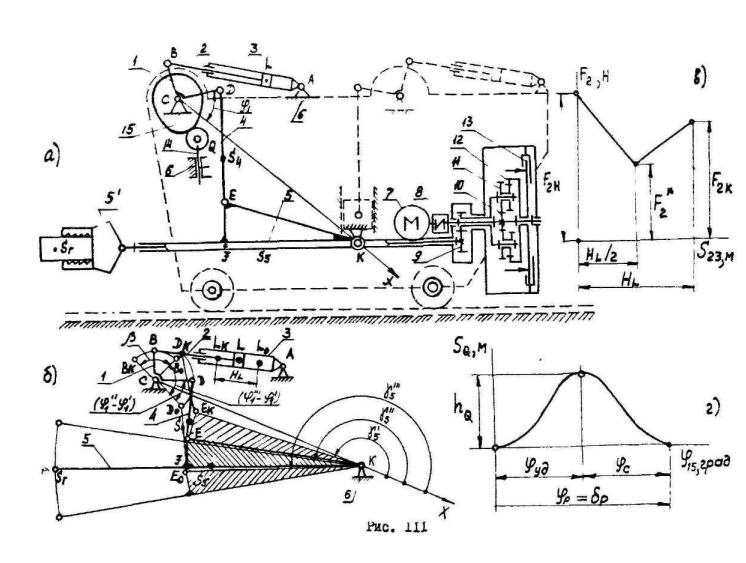
Манипулятор выполняет следующие операции: захват заготовки, перемещение заготовки в вертикальной и горизонтальной плоскости, вращение заготовки вокруг ее оси. Манипулятор состоит из подвижного основания 6, хобота 5, схвата 5’ и механизмов подъема хобота, его выравнивания (изображен штриховой линией), вращения схвата, а также гидравлических и электрических приводов.Механизм подъема состоит из гидроцилиндра 3 со штоком 2, коромысла 1, шатуна 4, и коромысла (хобота) 5. Регулирование давления в гидроцилиндре осуществляется кулачковым механизмом, кулачок 15 которого установлен на звене 1, а толкатель 14 соединен с регулятором давления. График изменения силы F2, действующей на поршень 2 при подъеме хобота с грузом, представлен на рис.3в.
Механизм вращения схвата приводится в движение от электродвигателя 7 через двухрядный планетарный редуктор 10-11-12 и зубчатую передачу 8-9 (см. рис. 3а). Для предохранения механизма от перегрузок в редукторе установлена фрикционна муфта 13, которая обеспечивает два режима движения: с остановленным колесом 12 и с остановленным колесом 10.
![]() Исходные данные
Исходные данные
| № п/п | Наименование параметра | Обозначение | Единица СИ | Числовые значения |
| 1 | Ход поршня в гидроцилиндре | HL | м | 0.5 |
| 2 | Угол поворота звена 1 | B | град | 90 |
| 3 | Относительные длины звеньев механизма гидроцилиндра | (LAB)min/HL LBL/HL | - - | 1.5 1.3 |
| 4 | Длина стойки | LCK | м | 2.7 |
| 5 | Длина коромысла | LEK | м | 1.835 |
| 6 | Угловые координаты звена 5 в верхнем положении в горизонтальном положении в нижнем положении | g5’ g5’’ g5’’’ | град град град | 213 203 193 |
| 7 | Углы поворота звена 1 при перемещении хобота из верхнего в горизонтальное положение из верхнего в нижнее положение | (f1’’-f1’) (f1’’’-f1’) | град град | 45 90 |
| 8 | Относительные размеры звеньев и координат Центров масс S4, S5, Sг звеньев 4, 5 и груза | LEF/LFK LKSг/LFK LDE/LDS4 LKSг/LKS5 | - - - - | 1/5 5/3 5/3 2 |
| 9 | Угловые размеры | | град град | 180 90 |
| 10 | Массы звеньев 4, 5 и груза и моменты инерции относительно их центров масс | m4 I4S m5 I5S mг | кг кг*м2 кг кг*м2 кг | 350 42 6000 14500 1500 |
| 11 | Угловая координата звена 1 (для силового расчета механизма) | f1 | град | 35 |
| 12 | Число зубьев колес 8 и 9 | Z8; Z9 | - | 11; 21 |
| 13 | Модуль колес | m | мм | 12 |
| 14 | Передаточное отношение планетарного редуктора | U1h | - | 17.5 |
| 15 | Число блоков сателлитов | K | - | 3 |
| 16 | Угол рабочего профиля кулачка | dp = fp | град | 90 |
| 17 | Ход толкателя в кулачковом механизме | hQ | м | 0.025 |
| 18 | Внеосность толкателя | e | м | 0.01 |
| 19 | Допустимый угол давления в кулачковом механизме | [Q] | град | 30 |
Чертежи
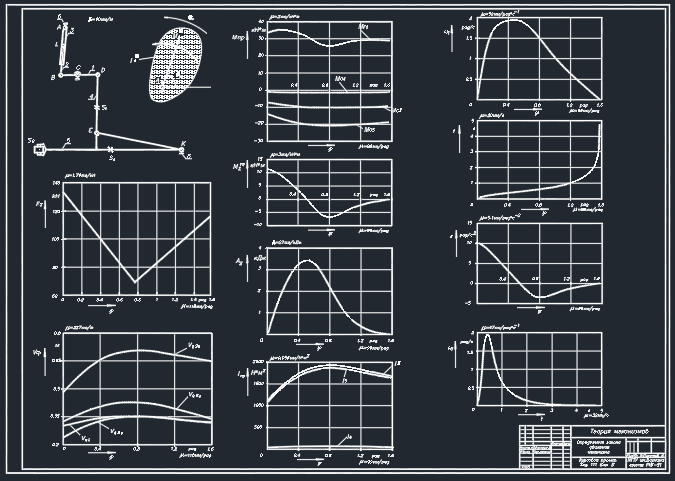
Лист 1 - Определение закона движения ![]()
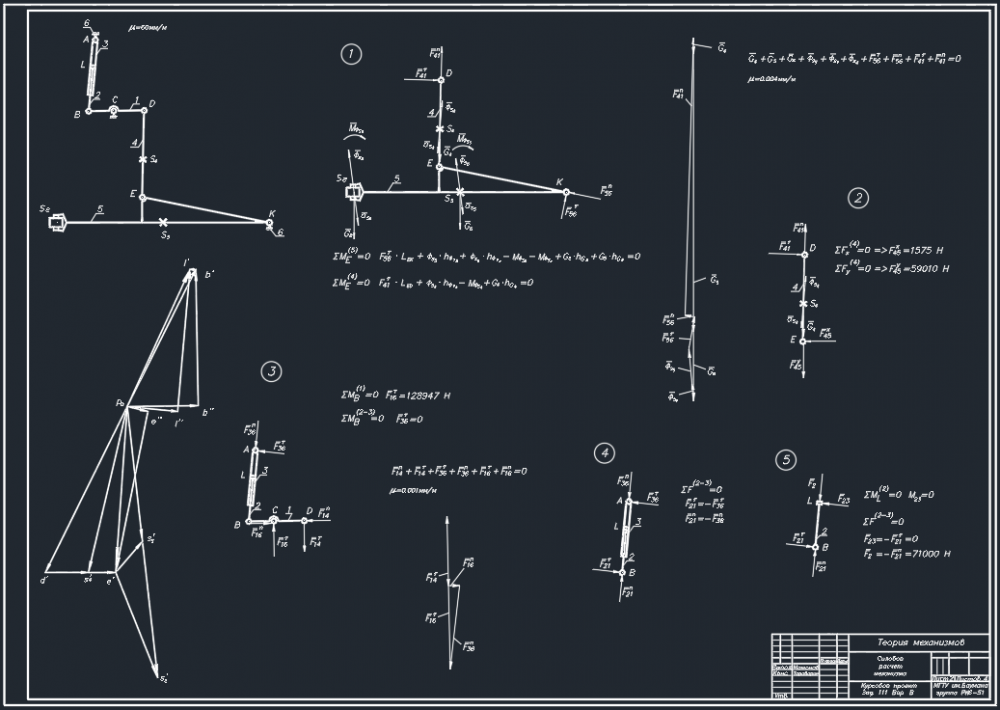
Лист 2 - Силовой расчет ![]()
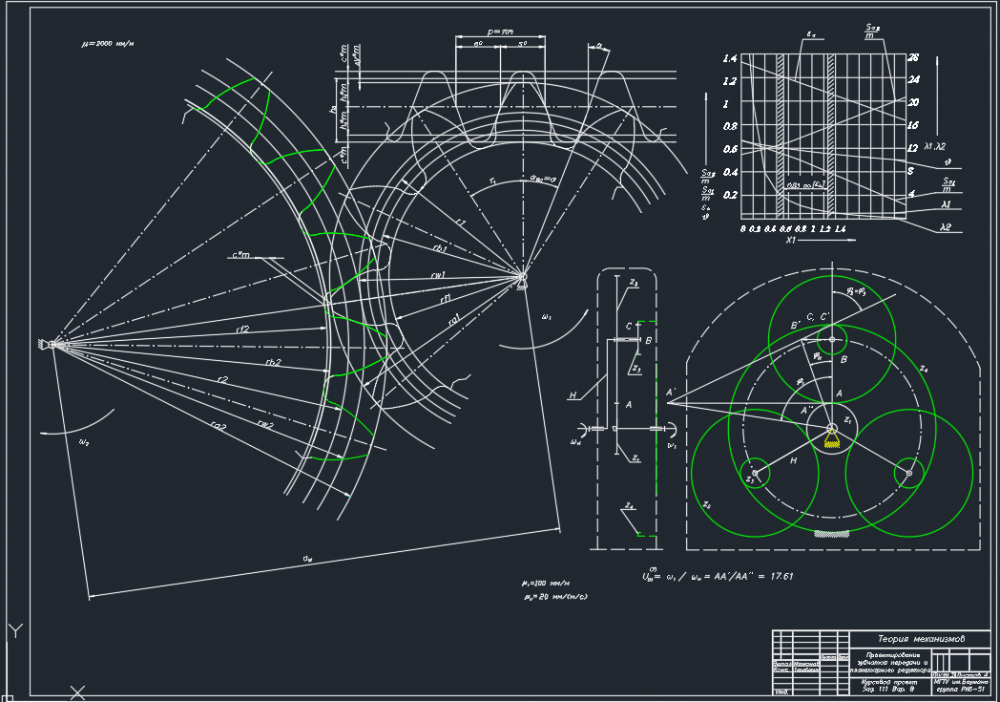
Лист 3 - Проектирование зубчатой передачи ![]()
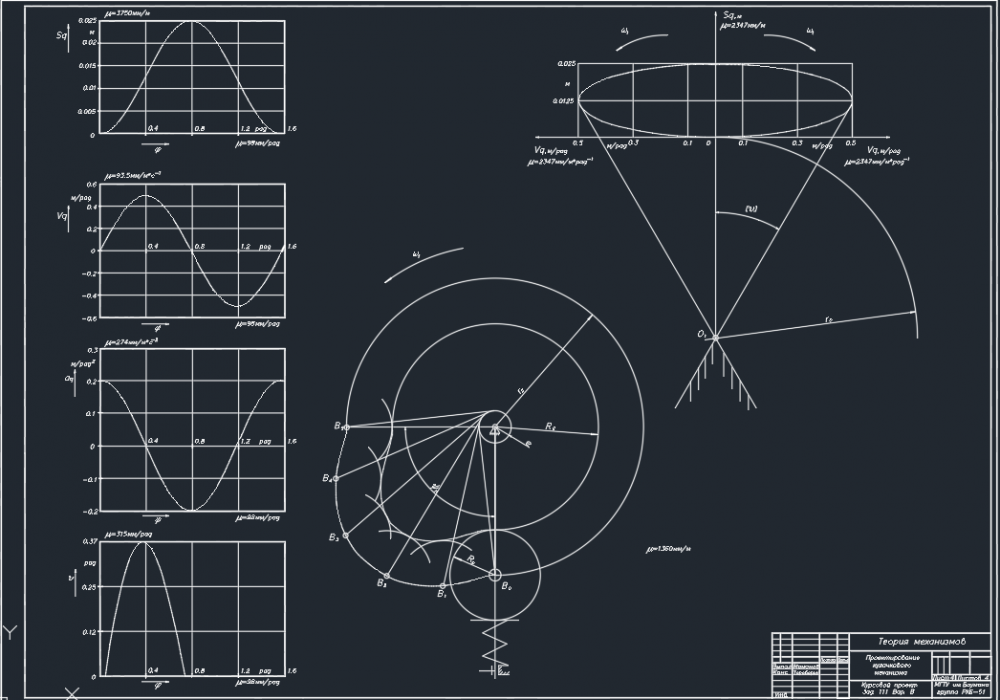
Лист 4 - Проектирование кулачкового механизма ![]()
Характеристики курсовой работы
Учебное заведение
 МГТУ им. Н.Э.Баумана
МГТУ им. Н.Э.БауманаСеместр
Номер задания
Вариант
Просмотров
305
Качество
Идеальное компьютерное
Размер
1,29 Mb
Преподаватели

Список файлов
Проектирование и исследование механизмов кузнечно-прессового манипулятора
РПЗ
РПЗ.doc
Титульный лист.doc
Расчеты
Cиловой.txt
DIADA.DI
LP.bmp
Project.di
s4.bmp
s5.bmp
sg.bmp
Кинематика.txt
Координаты для силового расчета.txt
Лист 1.xmcd
Лист 2.xmcd
Лист 4.xmcd
План скоростей _var2_bw.bmp
План ускорений _var2_bw.bmp
Силовой расчет.bmp
Лист 1.dwg
Лист 2.dwg
Лист 3.dwg
Лист 4.dwg

Если вам всё понравилось, поставьте оценку и напишите пару слов о работе - так вы поможете другим покупателям. В благодарность мы вернём вам 40 рублей на счёт.❤️
 stud-msc.help
stud-msc.help
18 ноября 2015 в 18:19
Комментарии
Нет комментариев
Стань первым, кто что-нибудь напишет!



















