реферат (1041030)
Текст из файла
Московский государственный технический университет имени Н.Э. Баумана
Факультет МТ
Кафедра МТ-11
Реферат на тему
«Наноиндентирование: виды, возможности
и оборудование»
Выполнила: Попова М.Г.
студентка МТ11-81
Преподаватель: Сидорова С.В.
Москва, 2015
Оглавление
Введение 3
Принципы и виды наноиндентирования 3
Оборудование и техника наноиндентирования 4
Методика Оливера-Фарра 7
Особенности индентирования 8
Информативные возможности наноиндентирования 10
Заключение 11
Список использованной литературы 12
Введение
Непрерывное уменьшение характерных размеров электронных компонентов, МЭМС, пленочных покрытий и других продуктов нанотехнологий сделало актуальным разработку средств исследования их физико-механических свойств в наномасштабе, т.к. такие объекты требуют небольших нагрузок, и использование оптической микроскопии становится неэффективным. Анализ литературных источников указывает на то, что механические свойства большинства материалов испытывают значительные изменения в субмикронных масштабах. Особенно влияние масштабного фактора сказывается на параметрах, характеризующих переход от упругого к упругопластическому деформированию, а также на механизмах зарождения и протекания начальных стадий пластической деформации.
Принципы и виды наноиндентирования
Одним из основных современных методов исследования механических свойств материалов в наномасштабе является метод наноиндентирования (далее НИ) или индентирования (depth-sensing indentation), заключающийся в прецизионном нагружении плоской поверхности образца индентором с одновременной регистрацией усилия внедрения Р и глубины внедрения h, что позволяет локализовать деформацию в субмикронной области исследуемого материала (Рис. 1). Индентирование позволяет определить модуль упругости и нанотвердость поверхности образца.

Рисунок 1 – Профиль поверхности образца
В зависимости от направления движения зондирующего поверхность инструмента по отношению к плоскости образца методы НИ подразделяют на наноиндентирование (индентор движется по нормали к поверхности, как показано на рисунке 1) и наносклерометрию (индентор движется по касательной к поверхности).
При проведении склерометрии на поверхность образца наносят серию царапин. Далее проводят анализ нанесенных царапин для определения твердости образца. Анализ заключается в определении ширины нанесенных царапин. Ширина царапины зависит от нагрузки, приложенной при ее нанесении, а также от твердости исследуемой области поверхности образца.
При проведении непосредственно наноиндентирования на поверхность образца наносят серию индентов. Далее проводят анализ нанесенных индентов, по результатам которого будут определены твердость и модуль упругости исследуемого образца. Анализ заключается в подборе параметров степенной функции, описывающей экспериментальную зависимость глубины погружения индентора от приложенной нагрузки, а также зависимость площади контакта от приложенной нагрузки.
Оборудование и техника наноиндентирования
Приборы, позволяющие проводить индентирование, принципиально устроены сходным образом и обычно называются индентометрами (см. Рис.2). Oни содержат узел нагружения 1 и прецизионный датчик 2 для регистрации перемещения индентора 3 на мягких пружинах 4, конструктивно объединенные в одну измерительную головку 5, контроллерный блок 6 и компьютер 7 с пакетом программ для управления прибором и обработки информации. Для позиционирования и перемещения образца 8 служит двух- или трехкоординатный столик 9.

Рисунок 2 – Принципиальная схема устройства наноиндентометра
В технике наноиндентирования используют инденторы различной формы – в виде цилиндра с плоским торцом, пирамиды, сферы, конуса. Каждая из них имеет свои достоинства и недостатки. Наиболее часто употребим алмазный индентор Берковича (трехгранная пирамида). Он позволяет избежать проблемы сведения четырех граней в одну точку и получить радиус закругления вершины менее 100 нм. На рисунке 3 представлены основные виды инденторов.

а б в г д
Рисунок 3 – Виды инденторов: а- Виккерса; б- Берковича; в- Кнупа;
г- конический; д- сферический
Рассмотрим реализацию процесса НИ подробнее на примере сканирующего зондового микроскопа (СЗМ) Солвер Некст из лаборатории кафедры МТ11. НИ на СЗМ осуществляется с помощью использования наносклерометрической головки, в комплект которой также входят пьезорезонансный зондовый датчик (Рис. 4) и эталонный образец для его калибровки.

Рисунок 4 - Зондовый датчик: 1 – алмазный индентер типа Берковича; 2 – консольная вилка; 3 - разъем для подключения зондового датчика к наносклерометрической головке; 4 – направляющий штифт;
5 – консоли; 6 – ограничитель изгиба консольной балки
Принцип работы прибора при индентировании следующий. Наконечник индентора, перпендикулярный к поверхности образца, вдавливается в него, путем приложения возрастающей нагрузки до предварительно заданной величины. Выдерживается заданное время при максимальной нагрузке, и затем её постепенно снижают. При этом вдавленный материал, под индентором, частично возвращается в свое исходное состояние. Таким образом, происходит упругопластическая деформация материала, т.е. испытываемый материал деформируется (вдавливается), как пластилин, под воздействием индентора, однако в конце стадии деформации в материале наблюдается частичное восстановление формы - упругое восстановление (Рис.5).
hc

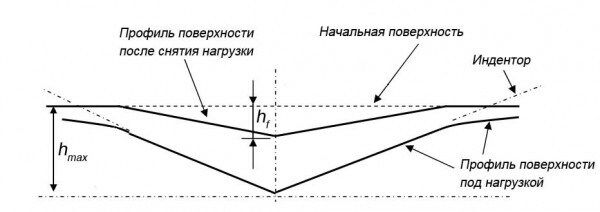
Рисунок 5 – Профиль поверхности образца: hmax – максимальная глубина отпечатка при максимальной нагрузке Рmax , hf - глубина проникновения индентора после снятия нагрузки, hc – контактная глубина отпечатка при максимальной нагрузке на индентор.
Для вычисления силы приложенной к зонду используют систему регистрации изгибов зондового датчика (далее – система регистрации). Система регистрации состоит из светодиода и фотодиода, расположенных, соответственно, в левой и правой частях держателя зондового датчика. Излучение от светодиода, проходя между нижней консолью зондового датчика и ограничителем изгиба консольной балки, попадает в фотодиод. Сигнал, зарегистрированный фотодиодом пропорционален силе, приложенной к зонду (см. Рис. 6).

Рисунок 6 - Устройство оптического датчика: 1 – держатель зондового датчика; 2 – винт для настройки зондового датчика; 3 – алмазный индентер; 4 – консоли; 5 – ограничитель изгиба консольной балки; 6 – излучение от светодиода
По результатам индентирования строится так называемая P-h-диаграмма (см. Рис.7) (диаграмма нагружения индентора), являющаяся, в некотором смысле, аналогом классической σ-ε-диаграммы, получаемой при макроскопических испытаниях, например, при одноосном растяжении/сжатии. Анализ P-h-диаграмм позволяет исследовать влияние масштабного фактора на механическое поведение материалов, а также при помощи специальных методик определять количественно ряд величин, характеризующих механические свойства изучаемых материалов. Чаще всего для этого пользуются методикой Оливера-Фарра.

Рисунок 7 - Схема нагружения и разгрузки образца
Методика Оливера-Фарра
Суть этого метода состоит в аппроксимации начального участка разгрузочной кривой степенной функцией
Pmax=B(h–hf)m,
где Рmax — максимальная нагрузка, h — глубина проникновения индентора, hf — глубина проникновения индентора после снятия нагрузки, В и m — эмпирически определяемые параметры (см. Рис.3).
Наклон начального этапа разгрузочной кривой определяет жесткость материала:

Глубина проникновения индентора hc при которой отпечаток повторяет форму алмазной пирамиды также определяется из графика нагружение - разгрузка по формуле:
hc =hmax -ɛPmax /S, где hmax— максимальная глубина проникновения индентора, ε = 0,75 для пирамиды Берковича. H и E рассчитываются по формулам:

где ν — коэффициент Пуассона покрытия, β =1,034 для пирамиды Берковича, А — площадь проекции отпечатка, определяемая из глубины максимального проникновения индентора hmax. Для алмазного индентора коэффициент Пуассона νi и модуль упругости Ei соответственно составляют 0,07 и 1141GPa.
Особенности индентирования
Методы локального механического тестирования материалов часто формально подразделяют на макро-, микро- и нано- индентирование, ориентируясь на характерные размеры отпечатка, которые попадают в тот или иной диапазон. Также можно обосновать эту классификацию физически. С ростом силы Р меняется как размер локально сдеформированной области, так и соотношение между упругой и пластической деформацией (Рис.8).

Рисунок 8 - Схематическое изображение изменения относительного вклада пластической деформации в формирование отпечатка по мере роста силы вдавливания Р и смены соответствующих стадий процесса погружения индентора в материал. Сплошная линия отвечает монотонному процессу пластического течения, штриховая – скачкообразному.
На начальных стадиях погружения индентора вся деформация является упругой. При этом твердость зачастую достигает теоретического предела прочности кристаллической решетки на сдвиг или близка к нему. Рост Р вызывает значительную пластическую деформацию, поэтому необходим одновременный учет обеих деформаций под контактной площадкой. Наконец, при макроиндентировании еще большее увеличение нагрузки приводит к образованию отпечатка, в котором долей упругой деформации можно пренебречь.
Следует отметить, что уменьшение силы порождает нарастающее влияние искажений и помех со стороны различных источников. Простой и надежный способ контроля правильности учета погрешностей – периодическое проведение тестов на хорошо изученных материалах и сравнение полученных данных с табличными. Эталоном в таких случаях часто служит плавленый кварц, у которого отсутствуют масштабный эффект и упрочнение поверхности при ее механической обработке. Корректно введенные поправки в первичные данные должны обеспечивать постоянство определяемых величин Е=72 ГПа и Н=9,5 ГПа.
Образование навалов (pile in) и провалов (sink in) по контуру отпечатка. Известно что, при НИ некоторых материалов может возникать искажение геометрической формы отпечатков. При внедрении индентора в жесткие материалы стороны отпечатка искажаются выпуклостью внутрь, а у мягких материалов – выпуклостью наружу (Рис.9)

Рисунок 9 - Виды отпечатков при упругом прогибе поверхности (а) и пластическом навале вокруг отпечатка (б): I – сечения вдоль оси индентора; II – реальные отпечатки в пленках; III – схемы отпечатков на видах сверху (штриховые линии – проекции индентора на искаженную поверхность образца).
Т.к. отсчет смещения индентора ведется от уровня поверхности образца, то в случае (а) –образование желобков (провалов), это приводит к завышению, а во втором случае (б) – к занижению регистрируемой глубины отпечатка с реальной. Существует несколько методов учета этой погрешности при обработке результатов. Например, прямой обмер отпечатка с целью определения площади контакта Ас без использования Р-h диаграммы, либо использование корректирующих функций, вносящих поправки в определяемые Е и Н.
Шероховатость поверхности. Известно, что шероховатость изучаемой поверхности существенно влияет на достоверность результатов наноиндентирования. Так в одном из литературных источников было установлено, что чем шероховатость поверхности меньше, тем твердость материала (Ni) выше (см. Рис.10).

Рисунок 10 – Зависимость твердости никеля от степени шероховатости поверхности, полученной полированием суспензией Al2O3 при разной контактной глубине: размеры частиц Al2O3 составляют 0,05(1), 1(2) и 5(3) мкм
Для снижения ее роли в измерениях используется очевидный прием: усреднение результатов по большому количеству отдельных тестов, проведенных в эквивалентных условиях.
Информативные возможности наноиндентирования
Кроме определения твердости и модуля упругости тонких пленок НИ дает возможность определить и другие разнообразные количественные характеристики материала из первичных данных путем смены программы обработки этих данных. Обработка Р-h диаграмм предоставляет следующие возможности:
- восстановление кривых активного деформирования σ=f(ε) и ползучести ε = f(t) материалов;
- исследование структуры многофазных материалов;
- определение степени адгезии и механических свойств покрытий;
- оценка величины и распределения внутренних напряжений;
- определение характеристик подвижности изолированных дислокаций и их скоплений в кристаллических материалах;
Характеристики
Тип файла документ
Документы такого типа открываются такими программами, как Microsoft Office Word на компьютерах Windows, Apple Pages на компьютерах Mac, Open Office - бесплатная альтернатива на различных платформах, в том числе Linux. Наиболее простым и современным решением будут Google документы, так как открываются онлайн без скачивания прямо в браузере на любой платформе. Существуют российские качественные аналоги, например от Яндекса.
Будьте внимательны на мобильных устройствах, так как там используются упрощённый функционал даже в официальном приложении от Microsoft, поэтому для просмотра скачивайте PDF-версию. А если нужно редактировать файл, то используйте оригинальный файл.
Файлы такого типа обычно разбиты на страницы, а текст может быть форматированным (жирный, курсив, выбор шрифта, таблицы и т.п.), а также в него можно добавлять изображения. Формат идеально подходит для рефератов, докладов и РПЗ курсовых проектов, которые необходимо распечатать. Кстати перед печатью также сохраняйте файл в PDF, так как принтер может начудить со шрифтами.















