Учебное пособие к лаб. работам по вторичной обработке информации (1014421), страница 2
Текст из файла (страница 2)
Применим математический аппарат цепей Маркова к анализу устройства (автомата) захвата, работающего по следующему алгоритму: завязка траектории производится по критерию "2/2", а обнаружение фиксируется, если отметка попадает в строб хотя бы в одном из трех следующих обзоров после завязки траектории (критерий подтверждения "1/3"). Таким образом, критерий обнаружения траектории может быть назван "2+1 из 5", т.е. "3 из 5".
Считаем, что на вход устройства захвата в очередном обзоре поступает "единица", если отметка цели попадает в экстраполированный строб, и "нуль", если отметка не попадает в этот строб.
Возможные комбинации "нулей" и "единиц" в течение m циклов обзора определяют состояния автомата. Составим таблицу состояний автомата захвата для критерия "3 из 5":
№ состояния комбинации "0" и "1" характерные состояния
1 11 -завязка траектории
2 110
3 111,1101,11001 -автозахват
4 1100
5 11000 -сброс траектории
По таблице состояний строится граф, см. рис. 3. В узлах графа указаны состояния автомата. Над ребрами графа указаны вероятности перехода из состояния в состояние, причем принято, что попадание отметки в строб (появление "единицы" на входе автомата) происходит с вероятностью р , а отсутствие ее в стробе (появление "нуля" на входе автомата) - с вероятностью q.
Переход системы из состояния в состояние зависит :
-от того, в каком состоянии находится автомат в данный момент,
-от текущего входного воздействия ("единица" или "нуль" на входе). Следовательно, состояния автомата образуют простую цепь Маркова.
Вектор начальных состояний (в нашем случае - после второго обзора, чем и определяется индекс) -
![]()
показывает, что с вероятностью ![]() произошла завязка траектории по критерию "2/2", с вероятностью
произошла завязка траектории по критерию "2/2", с вероятностью ![]() завязка траектории отсутствовала, что соответствует сбросу траектории, а остальные состояния автомата к началу третьего обзора невозможны.
завязка траектории отсутствовала, что соответствует сбросу траектории, а остальные состояния автомата к началу третьего обзора невозможны.

Матрица вероятностей переходов легко составляется на основе графа :
 ,
,
где номер строки соответствует номеру состояния, из которого переходит автомат, а номер столбца показывает, в которое состояние переходит автомат.
Можно определить векторы состояний автомата в 3,4 и 5 обзорах :
![]() ,
,
![]() и т.д.
и т.д.
Рассчитанные векторы состояний для 3,4 и 5 обзоров имеют вид :
![]() ,
,
![]() ,
,
![]() .
.
Сумма вероятностей по строке при этом равна единице.
Третий элемент вектора состояний дает значение вероятности автозахвата траектории за соответствующее число циклов обзора:
![]() ,
,
![]() ,
,
![]() .
.
Поскольку р есть вероятность попадания отметки в строб, то по своему физическому смыслу р соответствует вероятности правильного обнаружения цели в стробе автозахвата Dстр , а q = 1- Dстр. На рис.4а построена зависимость вероятности автозахвата от номера обзора при разных вероятностях правильного обнаружения в стробе Dстр . Видно, что с увеличением номера обзора вероятность автозахвата DАЗ возрастает, причем DАЗ тем больше, чем больше Dстр .
Вероятность ложного автозахвата определяется тем же соотношением, с той лишь разницей, что р есть вероятность ложной тревоги в стробе автозахвата Fстр , а q = 1- Fстр.
Зависимости вероятности ложного автозахвата от номера обзора при разных вероятностях ложной тревоги в стробе приведены на рис.4б.
Вероятности Dстр и Fстр вычисляются по формулам:
Dстр =D ; Fстр =MF,
где D и F - вероятности правильного обнаружения и ложной тревоги в элементе разрешения при первичной обработке, М - число элементов разрешения в стробе.
DАЗ(n) при Dстр=0,8
DАЗ(n) при Dстр=0,9
FАЗ(n) при Fстр=![]()
FАЗ(n) при Fстр=![]()
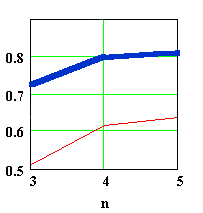
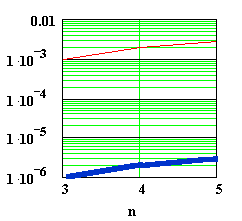
рис .4,а рис .4,б
Рассмотренный выше метод определения характеристик качества работы устройства автозахвата с использованием математического аппарата цепей Маркова является строгим аналитическим методом. Однако, недостатком этого метода является громоздкость вычислений при использовании более сложных критериев. Так, например, увеличение n приводит к повышению порядка матриц, и операции с ними становятся затруднительными. В этом случае для возведения матриц в степень и выполнения других операций необходимо использовать ЭВМ. Поэтому ниже предлагается упрощенная методика вычисления характеристик качества автозахвата, позволяющая с помощью графических построений рассмотреть процесс автозахвата на плоскости случайных блужданий.
Процесс автозахвата будем рассматривать в тех же предположениях, т.е. за начало автозахвата принимается наличие двух единиц подряд. Появление нулей и единиц на следующих шагах (циклах обзора) должно привести либо к пересечению верхнего порога "автозахват", либо нижнего порога "сброс". Между моментами появления комбинации "11" и пересечением верхнего или нижнего порога процесс переходит на каждом шаге в то или иное состояние. Поскольку появление на входе устройства нулей и единиц носит случайный характер, процесс перехода устройства из одного состояния в другое эквивалентен случайным "блужданиям". При этом плоскость, на которой происходят блуждания, принято называть "плоскостью случайных блужданий".
Траекторию блуждания процесса на плоскости можно рассматривать как движение (блуждание) некоторой точки, которую обычно называют "изображающей" точкой. Таким образом, весь процесс автозахвата можно представить графически. При этом расчет характеристик качества работы устройства автозахвата значительно упрощается и составления матриц в этом случае не требуется.
На рис.5 изображен график случайных блужданий для критерия "3 из 6". По оси ординат отложены номера шагов (циклов обзора), а по оси абсцисс - число нулей в имеющейся комбинации.

Движение изображающей точки начинается с момента появления двух единиц подряд, вероятность этого состояния р2. Стрелками указываются возможные направления перемещения изображающей точки, т.е. переходы из одного состояния в другое. Переходы в направлении вверх по вертикали происходят с вероятностью р, а по диагонали вправо и вверх - с вероятностью q. В предположении, что отдельные состояния независимы, вычисляются вероятности нахождения точки в каждом из состояний. Случайные блуждания этой точки происходят дискретно внутри области "неопределенность" до тех пор, пока точка не окажется либо на верхней пунктирной линии (состояние "автозахват"), либо на нижней (состояние "сброс"), после чего движение изображающей точки прекращается. Видно, что автозахват может произойти на третьем, на четвертом, на пятом и на шестом шаге, при этом оказываются вычисленными вероятности автозахвата на 3-м шаге (цикле обзора) ![]() , на 4-м шаге
, на 4-м шаге ![]() , на 5-м шаге
, на 5-м шаге ![]() и на 6-м шаге
и на 6-м шаге ![]() .
.
Вычисленные вероятности автозахвата на конкретном шаге позволяют определить, путем суммирования, вероятности автозахвата за конечное число шагов. Нетрудно убедиться, что при использовании критерия "3 из 6" вероятность автозахвата за 3 шага (цикла обзора) ![]() ; за четыре шага
; за четыре шага ![]() , за пять шагов
, за пять шагов ![]() и, наконец, за шесть шагов
и, наконец, за шесть шагов![]() .
.
Для расчета вероятности правильного автозахвата Dаз как функции числа шагов по-прежнему считаем p= Dстр , q=1 - Dстр , а для расчета вероятности ложного автозахвата FАЗ принимаем p= Fстр , q=1 - Fстр (используя те же соотношения).
Для расчета среднего времени автозахвата воспользуемся известной формулой математического ожидания:
![]() ,
,
где вероятности Pl (на конкретном l-м шаге) должны удовлетворять условию нормировки :
![]() ,
,
т.е. соответствовать полной группе событий.
Легко убедиться в том, что события "автозахват произведен на l-м цикле обзора" при l от k до m для любого критерия вида "k из m" не образуют полной группы. Поэтому для вычисления Т необходимо произвести нормировку. Для критерия автозахвата "k из m" нормировка осуществляется следующим образом :

Тогда для критерия "3 из 6" среднее время автозахвата вычисляется по формуле:
 ,
,
где ![]() .
.
Для расчета среднего времени правильного автозахвата TСРАЗ подставляем p= Dстр ,
q=1 - DСТР , а при расчете среднего времени ложного автозахвата TСРЛЗ :
p= Fстр, q=1 - Fстр .
Результаты расчета вероятностей правильного и ложного обнаружения траектории, а также среднего времени автозахвата по предлагаемой методике с использованием "плоскости случайных блужданий" полностью совпадают с расчетом, основанным на применении аппарата дискретных цепей Маркова.
Сопровождение траекторий.
Сопровождение траекторий состоит в непрерывной привязке вновь получаемых в очередном обзоре отметок к соответствующим траекториям, сглаживании координат и оценивании параметров траектории движения цели. Структурная схема алгоритма сопровождения траектории представлена на рис.8.














