
Цикловые системы управления
Цикловые системы управления.
Простейшие системы программного управления.
Управление по механическим упорам с использованием концевых и временных датчиков, количество фиксированных положений – 2 для каждой степени, но бывают и промежуточные упоры.
Программирование:
1. Установка механических упоров для каждого звена
2. Установка дополнительных датчиков
3. Задание последовательности перемещения отдельных звеньев, выдача команд управления ввод информации с дополнительных датчиков.
4. Отладка
4.1 Проверка точек позиционирования в ручном режиме
Рекомендуемые материалы
4.2 Проверка последовательности перемещения для всех рабочих программ
4.3 Прогон 1 цикла полностью
5. Работа в автоматическом режиме
Управление степенью подвижности может осуществляться по 2-м принципам: путевому и временному.
Путевой – окончание 1 действия цикла после срабатывания концевого датчика
Временной – окончание 1 действия цикла после срабатывания таймера
Манипулятор МП9С
Для обслуживания штамповальных прессов и других операций типа взять-перенести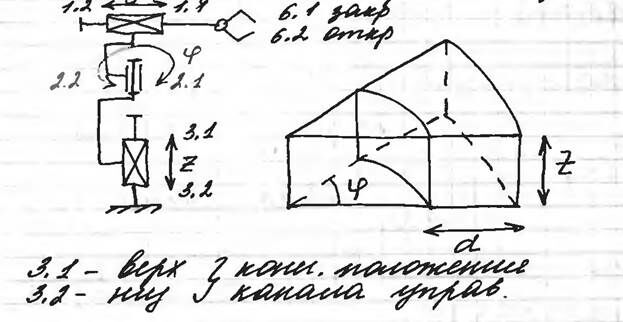
Технические характеристики манипулятора:
1. Грузоподъемность – 200г
2. Подвижность руки d – 150 мм
Z – 30 мм
Угол – 120 градусов
3. T max перемещения d,z – 0.5 c
Угол – 0.8 с
4. Точность позиционирования +- 50 мкм
5. Тип привода – пневматический
6. Рабочее давление 5-7 атмосфер.
Перемещение звеньев осуществляется по конечным механическим регулируемым упорам
Датчики – магнитные без контактные
Магнит ставится на звено, а электр контакт – на стационарный сигнал – данет
Устанавливаются пневматические демпферы для амортизации удара по упору
Захват – пневматический цилиндр открывает и закрывает губки
Модель робота в виде конечного автомата
Структурная схема устройства управления
В качестве управления можно использовать любое устройство логического управления т.к управление роботом осуществляется путем открытия и закрытия пневматических цилиндров путем подачи постоянного тока(24в 2А) для примера взята плата логического управления PIO – D144

1. На ПК с PIO-D144 устанавливается управляющая программа ,плата посылаетпринимает сигналы логического управления на выносную платув управляющую программу
2. Выносная плата DB-24prd включает в себя 24 силовых рэле и принимая сигналы управления открывает либо закрывает нужные из них, робот МП9С подключен также к этим рэле и при открытии одного из них пневматический цилиндр подключенный к этому рэле так же открывается и осуществляется перемещение 1 степени.
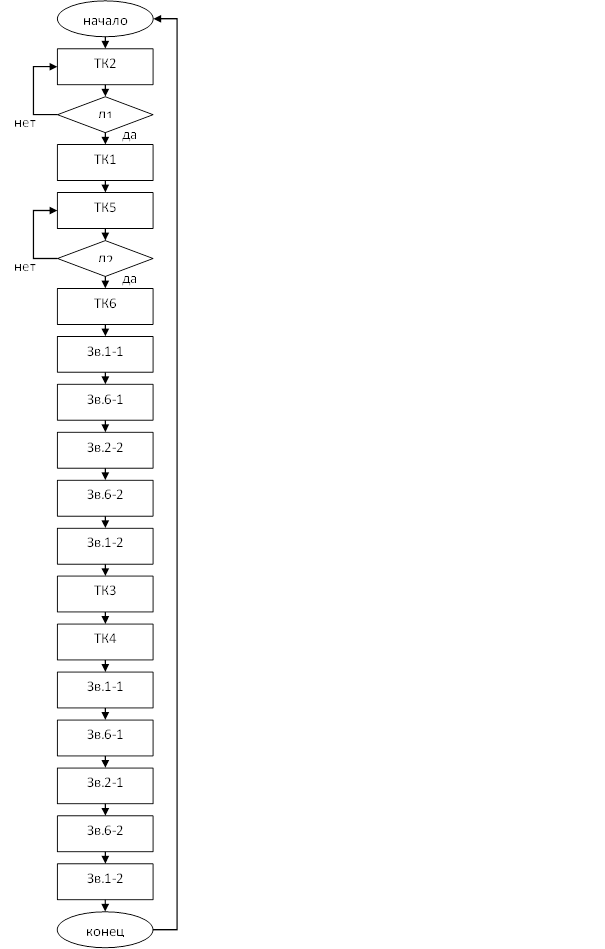
Пример управляющей программы МП9С
До недавнего времени в качестве системы циклового управления робота МП-9С использывалось устройство ЭЦПУ – 6030, которое предназначено для управления манипуляторами с позиционированием по упорам и соответствующим технологическим оборудованием. Данная система устарела и не дает возможности реализовать управление на высоком уровне в частности, невозможны работа по локальной сети и подключение внешних устройств, что значительно сокращает сферы применения робота МП-9С. На данный момент более оптимально использовать управление с ПК с помощью управляющих программ и устройств логического управления.
Расмотрим пример одной из возможных пргограмм.
ПО состоит из 2 программ:
1. Клиент
2. Сервер
Серверная программа установлена на ПК с платой логического управления и выносной платой, программа клиент может быть установлена на любом удаленном компьютере, соединенным локальной сетью с ПК сервером.
I
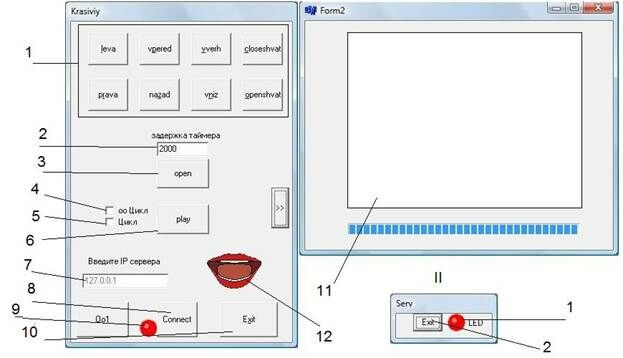
I - Клиентская часть:
1. Кнопки управления степенями робота в ручном режиме.
2. Поле для установки задержки таймера между выполнениями команд в автоматическом режиме
3. Открытие файла с кодом программы для автоматического режима
4. Опция бесконечного цикла кода программы
5. Опция конечного числа повторений программы
6.Кнопка включения автоматического режима
7. Поле для ввода IP адреса ПК на котором установлена программа-сервер
8. Подключение к программе сервер
9. Индикатор подключения к серверу
10. Выход из программы
11. Изображение с камеры передаваемое программой сервером
12. Озвучивание команд выполняемых роботом
II – программа сервер
1. Индикатор подключения клиента
2. Выход из программы с обнулением параметров
Команды для задания цикла.
V -вверх
N - вниз
L - влево
R - вправо
P - вперед
Z - назад
O – открыть схват
C – закрыть схват
E – конец цикла
Пример рабочего цикла
Vnlplpvze
Данная программа работает по временному принципу(срабатывание следующего шага цикла начинается по таймеру)
ДОМАШНЕЕ ЗАДАНИЕ
по курсу "Микропроцессорные системы управления"
для группы РК10-81.
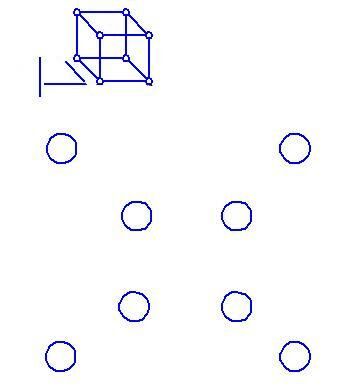
2. Для РМ - 01.
Переставить шашки в системе координат WORLD . Из положения
READY выйти в зону работы . Переставить шашки из угла в угол. Вернуться в положение READY.
Использовать п/п вычисления
Yw ^ исходного и конечного положения
|8 шашки , п/п перестановки одной
| шашки . Шаг доски 34.5 мм.
| Схват оснащен датчиком наличия
| шашки ( вход 5 ).
| При подходе к доске для взятия
Xw |1 и постановки шашки снизить
<---------------- скорость
8 1
Обучаются только транспортные положения и положение шашки (1:1). Если робот не захватил шашку , то печатается соответствующие сообщения и эта позиция пропускается.
----------------------------------------------------------------
3. Переставить шашки в системе координат доски. Положение доски произвольное . Переобучается только положение доски.(использовать FRAME). В подпрограмме вычисления начального и конечного положения шашки использовать составные положения.
Остальное аналогично второй задаче.
----------------------------------------------------------------
4. Взять шашку с номером (i,j) и поставить на позицию (k,l). I,j,k,l задаются с помощью канала ВУ , подключенного к дополнительному терминалу .
Из положения READY выйти в зону работы . Принять по последовательному каналу ВУ номера позиций i,j,k,l. Проверить их величину (1-8) . Если ошибка, то напечатать сообщение и перейти на начало приема. Переместить шашку.
Использовать фрагменты задачи 3.
Прием номеров позиций и их проверку оформить в виде п/п.
Вводимые номера должны отображаться на экране дополнительного терминала.
-----------------------------------------------------------------
5. Выполнить задачу 3 с прерыванием работы от датчика ограждения
( вход 1 ) . после прерывания робот должен продолжить свою
работу.
ВОПРОСЫ К ЗАЧЕТУ
по курсу "Микропроцессорные системы управления"
1. Классификация устройств управления ПР, способы программирования.
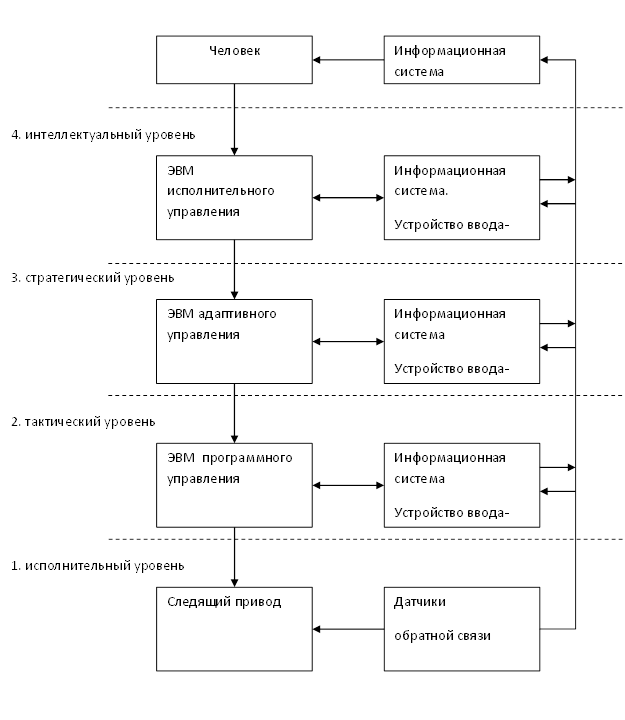
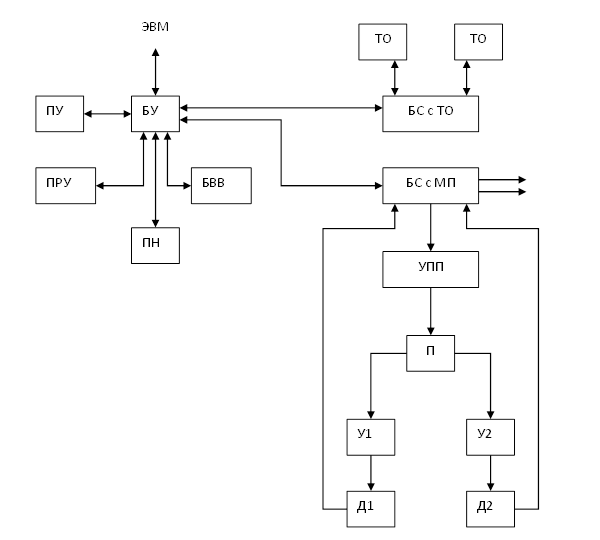
2. Структурная схема устройства программного управления роботами, иерархия управления.
3. Цикловые системы управления, блок-схема, основные блоки, перспективы развития.
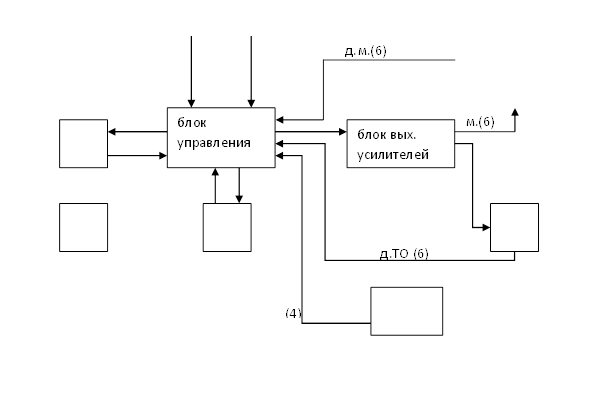
4. Устройство циклового управления ЭЦПУ-6030 и манипулятор МП-9С. Характеристики и структурная схема устройства управления.
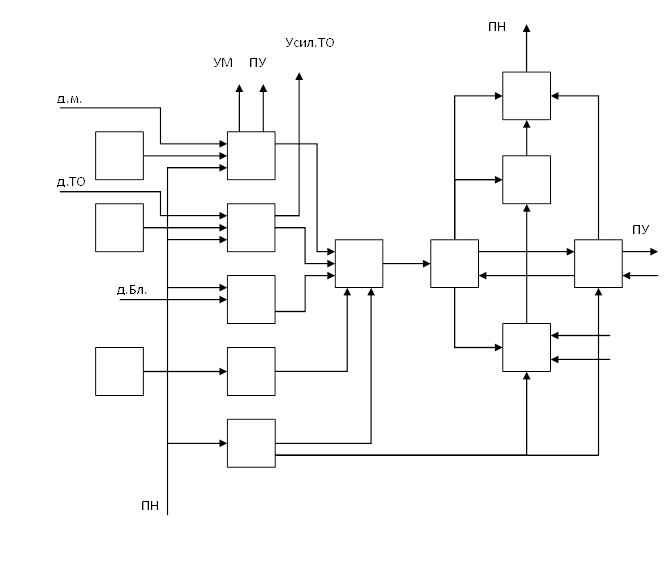
5. Блок управления устройства управления ЭЦПУ-6030.
6. Программирование устройства циклового управления ЭЦПУ-6030.
7. Устройство управления ПР на базе микро-ЭВМ "Электроника-60". Характеристики, структурная схема, структура памяти и регистров.
8. "Электроника-60". Организация обмена информацией с внешними устройствами в программном режиме, с прерываниями и в режиме ПДП.
9. "Электроника-60". Методы адресации.
10. Назначение, характеристики и конструкция ПР НЦТМ-01.
11. Устройство управления ПР НЦТМ-01. Структурная схема и основные блоки.
12. Принципы и алгоритмы управления ПР НЦТМ-01.
13. Позиционные системы управления.
14. Контурные системы управления.
15. ПР РМ-01. Назначение, характеристики и конструкция.
16. Устройство управления "Сфера-36". Основные блоки. Режимы работы.
17. Устройство управления "Сфера-36". Структурная схема верхнего уровня управления. Назначение модулей. Задачи верхнего уровня управления.
18. Устройство управления "Сфера-36". Структурная схема нижнего уровня управления. Назначение модулей. Задачи нижнего уровня управления.
19. Устройство управления "Сфера-36". МУП и МС.
20. Цифровой следящий привод ПР РМ-01. Канал управления.
21. Цифровой следящий привод ПР РМ-01. Канал обратной связи по положению.
22. Цифровой следящий привод ПР РМ-01. Канал обратной связи по скорости.
23. Обмен информацией между МЦП и МПП при управлении ПР РМ-01. Режим калибровки.
24. ARPS. Положения, индексы линий входов/выходов, переключатели программы, операторы.
25. ARPS. Команды монитора.
26. ARPS. Команды пользователя.










| 0 | 92 | включить транспортер | |
| 1 | 71 | опрос Д1 | |
| 2 | 91 | выключить транспортер | |
| 3 | 95 | включить барабан | |
| 4 | 80 | опрос Д2 | |
| 5 | 96 | выключить барабан | |
| 6 | 10 | выдвинуть руку | |
| 7 | 05 | сжать схват | |
| 8 | 40 | поворот влево | |
| 9 | 06 | разжать схват | |
| 10 | 20 | втянуть руку | |
| 11 | 93 | опустить пресс | |
| 12 | 94 | поднять пресс | |
| 13 | 10 | выдвинуть руку | |
| 14 | 05 | сжать схват | |
| 15 | 30 | поворот вправо | |
| 16 | 06 | разжать схват | |
| 17 | 20 | Рекомендуем посмотреть лекцию "10 Трудности обеспечения надежности эс и ее живучести". втянуть руку | |
| 18 | 00 |


















