
Электромеханический привод
3. Электромеханический привод
3.1. Функции и структура электромеханического привода.
3.2. Регулируемый и нерегулируемый привод: особенности построения кинематических цепей (КЦ).
3.3. Характеристика КЦ: передаточное отношение, передаточное число. Описание КЦ с помощью уравнения баланса.
3.4. Звенья настройки регулируемого привода. Вывод формулы настройки для регулируемого привода.
3.5. Бесступенчатая настройка: двигатели, вариаторы. Ступенчатая настройка: блоки шкивов, гитары, коробки скоростей и другие. Сравнительный анализ по параметрам диапазона и дискретности настройки. Условия сборки.
3.6. Способы настройки. Точная настройка, в том числе с использованием ЭВМ. Приближенная настройка. Табличные способы. Интерполяция табличных значений. Расчет погрешности настройки, абсолютная и относительная погрешность.
3.7. Варианты настройки на примерах: установки навивки спиралей, установки совмещения и экспонирования с пантографиеской передачей. Особенности настройки кинематических цепей с индивидуальными источниками движения (распределенный или многодвигательный привод). Настройка кинематической цепи с требуемой точностью (на примере настройки цепи вертикального перемещения затравки в установке для выращивания монокристалла).
3.8. Технические средства для расширения диапазона настройки: а) суммирующие механизмы на основе червячной передачи, конического дифференциала, винтовой передачи; б) дифференциальная цепь. Вариантность построения, параметры сравнения и выбора суммирующих механизмов.
Рекомендуемые материалы
3.9. Мехатронный привод: структура, типовые конструкции.
Рекомендуемая литература:
1. Антонов В.А. Технология производства электровакуумных и полупроводниковых приборов. 1979.
2. Панфилов Ю.В., Цветков Ю.Б., Рябов В.Т. Оборудование производства интегральных схем и промышленные роботы. Учебник для техникумов. 1988
3. Технология, оборудование и системы управления в электронном машиностроении. Энциклопедия «Машиностроение», том III-8. 2000
4. Готра Э.Ю. Технология микроэлектронных устройств. Справочник. 1991
5. Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей. Учебник. 2005
6. Наземцев А.С. Гидравлические и пневматические системы. Часть 1: Пневматические приводы и средства автоматизации. Уч.пособие. 2004
- Попов Д.Н. Механика гидро- и пневмоприводов. 2002
3. НАСТОЙКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА
Цель настройки – обеспечить регламентированные движение выходных звеньев каждой кинематической цепи привода.
Диапазон настройки
Вид настройки (бесступенчатая, ступенчатая)
Погрешность настройки
Приводы универсальных технологических установок позволяют регулировать параметры движения выходных звеньев, например, их частоту вращения, скорость перемещения и т.п. Разность числовых показателей между максимальным и минимальным значением параметра движения выходного звена называется диапазоном настройки.
Внутри этого диапазона выходной параметр может регулироваться ступенчато (дискретно) или бесступенчато (плавно).
Цель достигается с помощью устройств (звеньев настройки). Они позволяют изменять передаточный коэффициент i соответствующих кинематических цепей за счёт изменения передаточного коэффициента звена настройки ivar:
i = ivar ∏ ij
Существует два вида настройки:
· бесступенчатая настройка (плавное регулирование выходного параметра);
· ступенчатая (дискретная) настройка.
В зависимости от вида звенья настройки разделяются на:
| jст | k | x | y | % | ||
| 1,06 | 1 | 40 | 12 | 5 | ||
| 1,12 | 2 | 20 | 6 | 10 | ||
| 1,26 (1,25) | 4 | 10 | 3 | 20 | ||
| 1,4 (1,41) | 6 | -6,67 | 2 | 30 | ||
| 1,58 (1,6) | 8 | 5 | (1,5) | 40 | ||
| (1,78) | 10 | 1 | (1,2) | 45 | ||
| (2,0) | 12 | (3,333) | 1 | 50 | ||
| k - показатель степени jст=(1,06)k | ||||||
|
| ||||||
| Стандартный комплект сменных колёс | ||||||
| (44 зубчатых колеса) | ||||||
| 20-23-25-30-33-34-35-37-40-41-43-45-47-50-53- | ||||||
| 55-58-59-60-61-62-65-67-70-71-73-75-79-80-83- | ||||||
| 85-89-90-92-95-97-98-100-105-110-113-115-120-127 | ||||||
| выделенные зубчатые колёса составляют "пятковый набор" |
Бесступенчатая передача это механизм для плавного изменения передаточного числа u, т. е. отношения частоты вращения ведущего звена nвщ к частоте вращения ведомого nвм. Такая передача применяется в станках, транспортных машинах, приборах и т.д. Бесступенчатое регулирование скорости по сравнению со ступенчатым повышает производительность машин, облегчает автоматизацию и даёт возможность управления на ходу. Бесступенчатая передача (БП) — часть вариатора, который состоит из одной или нескольких бесступенчатых передач и устройств, обеспечивающих их функционирование. Различают электрические и механические БП.
Механические бесступенчатые передачи делятся на:
· фрикционные (трения) и зацепления,
· непрерывного действия и импульсные.
Термин «бесступенчатая передача» обычно применяют к механическим передачам с гибким или жёстким звеном.

Рис.1. Бесступенчатые передачи с гибким звеном и:
а) с принудительным согласованным сближение одной пары конусов и раздвижением другой пары; б) с осевым перемещением пар конусов принудительно и с помощью пружины; в) с помощью изменения межосевого расстояния.
Фрикционные бесступенчатые передачи с гибким звеном и раздвижными коническими шкивами (рис. 1) обеспечивают малое изменение передаточного числа при изменении нагрузки, отличаются высокой надёжностью, но имеют большие габариты. В передачах с гибким звеном (клиновым ремнем или специальной роликовой цепью) передаточное число изменяется:
- принудительным согласованным сближением одной пары конусов и раздвижением другой при помощи механизма управления (рис.1, а);
- осевым перемещением одной пары конусов принудительно, а другой под действием пружины (рис. 1, б);
- изменением межосевого расстояния A при одном подпружиненном и другом закрепленном шкиве (рис. 1, в).

Рис.2. Бесступенчатая передача зацепления с гибким звеном
Бесступенчатые передачи зацепления с гибким звеном отличаются высокими эксплуатационными качествами, но сложны в изготовлении. Основные элементы этой передачи: раздвижные зубчатые конусы и пластинчатая цепь. Звенья цепи имеют поперечные окна, в которые вставлены пакеты тонких пластин (рис. 2). Против выступов на одном конусе располагаются впадины другого так, что при перемещении в осевом направлении пластины принимают форму зубьев, осуществляя зацепление.
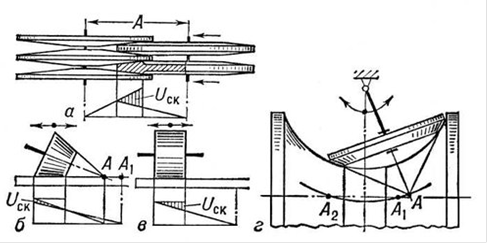
Рис.3. Фрикционные передачи бесступенчатого регулирования:
а) многодисковые передачи; б) с коническим роликом; в) с цилиндрическим роликом; г) торовый.
Фрикционные БП с жёстким звеном компактны и имеют обычно жёсткую механическую характеристику, но требуют значительных сил для прижатия рабочих тел и создания необходимого трения между ними; имеют пониженную надёжность в эксплуатации из-за возможности пробуксовки и повреждения рабочих поверхностей. Кпд и долговечность этих передач в значительной степени зависят от геометрического скольжения, возникающего в результате неравенства скоростей ведущего и ведомого звеньев на линии контакта. Чем больше относительная скорость скольжения Vcк на линии контакта, тем ниже кпд и больше износ трущихся поверхностей.
На рис. 3 показаны схемы некоторых БП., расположенных в порядке уменьшения геометрического скольжения. Многодисковые передачи (рис. 3, а), несмотря на невыгодную схему геометрического скольжения, широко применяются для средних и больших мощностей из-за благоприятных условий образования масляного клина в местах контакта и наличия большого числа узких контактных поверхностей. В лобовой БП (рис. 3, б) с коническим роликом при совпадении вершины конуса А с точкой А1 геометрическое скольжение отсутствует, а в других положениях оно существенно меньше, чем у передачи с цилиндрическим роликом (рис. 3, в). В схеме торовой бесступенчатой передачи (рис. 3, г) очень мало геометрическое скольжение во всех положениях роликов и практически отсутствует в положениях, когда вершина А конической поверхности, условно заменяющей сферическую поверхность ролика, находится в точках А1 и А2, на геометрической оси чашек. Передачи этого типа, выполненные с 2 и 3 роликами, отличаются высоким кпд и компактностью. Недостатком их являются сложность изготовления, ремонта и пониженная надёжность. Бесступенчатые передачи с точечным контактом имеет промежуточные стальные шары (рис. 4), положение физических или геометрических осей которых изменяется механизмом управления.

Рис.4. Бесступенчатые передачи с точечным контактом:
а) по внешним поверхностям; б) по внутренним поверхностям.
Литература
Детали машин. Справочник, 3 изд., т. 3, М., 1969;
Краткий справочник машиностроителя, М., 1966.
Суммирующие механизмы
(для самостоятельного изучения)
Для расширения диапазона настройки кинематических цепей применяется суммирование движений. В качестве суммирующих механизмов используются винтовые, реечные, червячные, планетарные и дифференциальные передачи. 
Винтовая пара. На рис.1 представлен один из вариантов суммирующего механизма на основе винтовой передачи, которая состоит из гайки 3 и винта 4. На гайку движение передаётся через вал 1. Подшипник 2 позволяет гайке осуществлять только вращательное движение. Ходовой винт может вращаться, а также перемещаться в осевом направлении при помощи вилки 5. Отличительной особенностью рассматриваемого варианта является то, что в передаче резьба выполнена с большим шагом Т. Это позволяет устранить эффект самоторможения винтовой пары.
 Суммирование движений осуществляется следующим образом. Примем, что вилка 5 неподвижна, а гайку 3 поворачиваем на n оборотов, тогда ходовой винт сделает также n оборотов. Допустим, что гайка неподвижна, а ходовой винт перемещается на величину l, тогда из-за отсутствия самоторможения винт сделает l/T оборотов. Если производить одновременно вращательное движение гайки и поступательное движение ходового винта, то на винте произойдёт суммирование движений. В результате он повернётся на (n ±
Суммирование движений осуществляется следующим образом. Примем, что вилка 5 неподвижна, а гайку 3 поворачиваем на n оборотов, тогда ходовой винт сделает также n оборотов. Допустим, что гайка неподвижна, а ходовой винт перемещается на величину l, тогда из-за отсутствия самоторможения винт сделает l/T оборотов. Если производить одновременно вращательное движение гайки и поступательное движение ходового винта, то на винте произойдёт суммирование движений. В результате он повернётся на (n ±  ) оборотов.
) оборотов.
 Аналогичный результат может быть получен на винтовом механизме (рис.2), у которого вал 1, связанный с гайкой 3, имеет возможность не только вращаться, как в описанном варианте, но и перемещаться с помощью вилки 5. Если рассмотреть отдельно воздействие этих движений на вращение ходового винта 4, то получим, что, поворачивая гайку на n оборотов, винт повернётся также на n оборотов, а при перемещении гайки на расстояние l винт совершит оборотов. Суммарное движение на ходовом винте будет равно (n ±) оборотов.
Аналогичный результат может быть получен на винтовом механизме (рис.2), у которого вал 1, связанный с гайкой 3, имеет возможность не только вращаться, как в описанном варианте, но и перемещаться с помощью вилки 5. Если рассмотреть отдельно воздействие этих движений на вращение ходового винта 4, то получим, что, поворачивая гайку на n оборотов, винт повернётся также на n оборотов, а при перемещении гайки на расстояние l винт совершит оборотов. Суммарное движение на ходовом винте будет равно (n ±) оборотов.
Ещё два варианта суммирующих механизмов, созданных на основе винтовой передачи, имеют резьбу, обеспечивающую самоторможение передачи. Обозначим шаг такой резьбы как t. В этих вариантах суммарное движение формируется на гайке.
 На рис.3 винтовой механизм, в котором, при вращении ходовой винта 1 на n оборотов, гайка 2 перемещается на расстояние n×t, а перемещение винта 3 на величину l приводит к перемещению гайки на ту же величину l. Суммарное перемещение гайки составит (n×t ± l). Этот суммирующий механизм нашёл своё применение в установках для изготовления арматуры электровакуумных приборов.
На рис.3 винтовой механизм, в котором, при вращении ходовой винта 1 на n оборотов, гайка 2 перемещается на расстояние n×t, а перемещение винта 3 на величину l приводит к перемещению гайки на ту же величину l. Суммарное перемещение гайки составит (n×t ± l). Этот суммирующий механизм нашёл своё применение в установках для изготовления арматуры электровакуумных приборов.
 Следующий суммирующий механизм используется в устройствах для коррекции шага ходового винта (рис.4). Принцип действия устройства основывается на том, что суммируются два движения гайки. Первое движение – перемещение гайки 3 при вращении ходового винта 2, второе – перемещение гайки за счёт своего собственного вращения на ходовом винте. Определим суммарное движение гайки, сложив эти два движения. Примем, что при первом движении винт совершает n оборотов, тогда гайка переместится на расстояние n×t. При втором – гайка поворачивается на угол a и перемещается на a×t. Суммарное движение гайки равно n×t ± a×t. Угол a определяется величиной подъёма профиля корректирующей линейки 6 и плечом рычага 4 вместе с роликом 5.
Следующий суммирующий механизм используется в устройствах для коррекции шага ходового винта (рис.4). Принцип действия устройства основывается на том, что суммируются два движения гайки. Первое движение – перемещение гайки 3 при вращении ходового винта 2, второе – перемещение гайки за счёт своего собственного вращения на ходовом винте. Определим суммарное движение гайки, сложив эти два движения. Примем, что при первом движении винт совершает n оборотов, тогда гайка переместится на расстояние n×t. При втором – гайка поворачивается на угол a и перемещается на a×t. Суммарное движение гайки равно n×t ± a×t. Угол a определяется величиной подъёма профиля корректирующей линейки 6 и плечом рычага 4 вместе с роликом 5.
 Реечная передача. Суммирующий механизм может состоять из рейки 1 и реечного колеса 2 (рис. 5). Если одновременно в продольном направлении перемещать рейку на величину l, а реечное колесо на l2, то на реечном колесе формируется суммарное перемещение (
Реечная передача. Суммирующий механизм может состоять из рейки 1 и реечного колеса 2 (рис. 5). Если одновременно в продольном направлении перемещать рейку на величину l, а реечное колесо на l2, то на реечном колесе формируется суммарное перемещение ( ) об., где d — средний диаметр реечного колеса.
) об., где d — средний диаметр реечного колеса.
 Червячная пара. С помощью червячной пары можно получить большое число вариантов суммирования движений (рис.6). В первом варианте (рис.6,а) червяк 1 является ведущим звеном, а червячное колесо 2 ведомым. При повороте червяка на п оборотов, червячное колесо сделает п
Червячная пара. С помощью червячной пары можно получить большое число вариантов суммирования движений (рис.6). В первом варианте (рис.6,а) червяк 1 является ведущим звеном, а червячное колесо 2 ведомым. При повороте червяка на п оборотов, червячное колесо сделает п оборотов (где k – число заходов червяка). Дополнительное перемещение червяка в осевом направлении на величину l, по аналогии с реечной передачей, вызывает поворот червячного колеса на величину
оборотов (где k – число заходов червяка). Дополнительное перемещение червяка в осевом направлении на величину l, по аналогии с реечной передачей, вызывает поворот червячного колеса на величину  оборотов (где Z – число зубьев колеса, tч – шаг червяка). Одновременное вращательное и поступательное движения червяка вызовут суммарный поворот червячного колеса (об.): п± .
оборотов (где Z – число зубьев колеса, tч – шаг червяка). Одновременное вращательное и поступательное движения червяка вызовут суммарный поворот червячного колеса (об.): п± .
Если принять червяк (рис. 6,б) ведущим и осуществляющим только одно вращательное движение на n оборотов, а червячное колесо будет перемещаться вдоль червяка на величину l, то на червячном колесе суммируются вращательные движения (п± ) оборотов.
Два следующих варианта формируют суммарное движение на червяке. Такая возможность появляется только в том случае, когда шаг Tч винтовой линии червяка имеет большую величину, устраняющую самоторможение червячной пары.
Сообщаем ведущему червячному колесу п оборотов (рис. 6,в), тогда ведомый червяк сделает  оборотов. При перемещении червяка в продольном направлении на величину l он сделает
оборотов. При перемещении червяка в продольном направлении на величину l он сделает  оборотов. При вращении червячного колеса и поступательном перемещении червяка на червяке возникнет суммарное вращение, равное (п
оборотов. При вращении червячного колеса и поступательном перемещении червяка на червяке возникнет суммарное вращение, равное (п ±
± ) оборотам.
) оборотам.
Если сообщить червячному колесу (рис. 6,г) вращательное и поступательное движение, то за п оборотов червячного колеса червяк совершит поборотов, а при поступательном перемещении червячного колеса на величину l червяк сделает  дополнительных оборотов. Суммарное число оборотов на червяке (п±).
дополнительных оборотов. Суммарное число оборотов на червяке (п±).
 Конический дифференциал - суммирующий механизм, выполненный из 4-х конических зубчатых колес. Прежде чем рассматривать суммирование движений в коническом дифференциале, проанализируем возможные варианты его конструкции.
Конический дифференциал - суммирующий механизм, выполненный из 4-х конических зубчатых колес. Прежде чем рассматривать суммирование движений в коническом дифференциале, проанализируем возможные варианты его конструкции.
Один из таких вариантов (рис.7,а) состоит из неподвижного конического колеса z1, ведомого z3, а также сателлитов z2 и z4, установленных на T-образном ведущем валу. При вращении T-образного вала сателлиты z2 и z4 катятся по неподвижному колесу z1 и передают движение ведомому колесу z3. Для определения передаточного отношения воспользуемся графиком скоростей, приняв точку C за мгновенный центр качения сателлита z2 по неподвижному колесу z1. На графике скоростей: v1 — скорость центра колеса z2, создаваемая вращением T-образного вала; v2 — скорость точки колеса z2, расположенной на расстоянии диаметра D от точки C, соответствующая окружной скорости колеса z3. Тогда передаточное отношение конического дифференциала при ведущем T-образном валу составит

Рассматривая схему (рис.7,б) другого конического дифференциала, обратим внимание, что у него коническое колесо z1 неподвижно, колесо z3 является ведущим, а T-образный вал - ведомым. В этом случае передаточное отношение

Если T-образный вал неподвижен (рис.7,в), зубчатое колесо z1 является ведущим, a z3 — ведомым, то передаточное отношение будет равно
 .
.
Как суммирующий механизм конический дифференциал работает по рассмотренным ниже схемам. Так, на рис.7,г показана схема дифференциала, у которого ведущими звеньями являются T-образный вал, вращающийся со скоростью nT (об./мин), и коническое колесо z3, совершающее n3 оборотов в минуту, а ведомым — колесо z1. Тогда суммарное движение на выходном звене составит  Знак плюс или минус зависит от направления вращения ведущих звеньев.
Знак плюс или минус зависит от направления вращения ведущих звеньев.
Если ведущими звеньями будут конические колёса z1 и z3 , а ведомым – T-образный вал (рис.7,д), то суммарное движение будет определяться как 
СПОСОБЫ ПОВЫШЕНИЯ КИНЕМАТИЧЕСКОЙ ТОЧНОСТИ ПРИВОДА
Основными способами повышения кинематической точности являются:
- Повышение точности изготовления и сборки элементов привода. Достигается за счёт применения в техпроцессе более точного оборудования, что сопряжено со значительными материальными затратами.
- Размещение звеньев кинематической цепи по степеням редукции. Зубчатые пары с наименьшим передаточным отношением i необходимо размещать ближе к ведомому звену. Наименее точные передачи – ближе к ведущему звену (по этой причине звенья настройки следует размещать в начале кинематической цепи).
![]() Использовать корректирующие устройства. На рисунке приведёна схема механизма, корректирующего погрешность шага ходового винта установки «Алмаз-М» для скрайбирования полупроводниковых пластин.
Использовать корректирующие устройства. На рисунке приведёна схема механизма, корректирующего погрешность шага ходового винта установки «Алмаз-М» для скрайбирования полупроводниковых пластин.
 Использовать корректирующие устройства. На рисунке приведёна схема механизма, корректирующего погрешность шага ходового винта установки «Алмаз-М» для скрайбирования полупроводниковых пластин.
Использовать корректирующие устройства. На рисунке приведёна схема механизма, корректирующего погрешность шага ходового винта установки «Алмаз-М» для скрайбирования полупроводниковых пластин. Рис.1. Корректирующий механизм
1 – столик; 2 – ходовой винт; 3 – гайка; 4 – рычаг; 5 – ролик; 6 – корректирующая линейка.
Корректирующая линейка 4 изготавливается для конкретного ходового винта и учитывает его погрешности изготовления.
Измерение погрешностей ходового винта может осуществляться либо оптическим способом (рис.2), либо механическим или электромеханическим (рис.3).

Рис.2. Оптический способ
1 – микроскоп; 2 – шкала; 3 – каретка; 4 – прецизионные гайки; 5 – исследуемый ходовой винт.

Рис.3. Электромеханический способ
1 – исследуемый ходовой винт; 2 – эталонный ходовой винт; 3 и 4 – прецизионные гайки; 5 – наконечник измерителя; 6 – измеритель
| Введение в параллельные механизмы |
| Автор: Галямов Ильдар Дата: 2009-12-10 |
| google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); |
Большинство механических рук промышленных роботов и других манипуляторов более или менее напоминают человеческую руку и содержат последовательно расположенные двигатели, каждый из которых встроен в шарнир или связан с шарниром, имеющим одну степень свободы. На рисунке 1а показан двигатель вращения, расположенный в шарнире; на рисунке 1б линейный двигатель, "охватывающий" шарнир.

Рисунок 1 - Схема управления вращением шарнира.
a - с помощью вращательного двигателя в шарнире;
б - с помощью линейного двигателя, "охватывающего" шарнир
С геометрической точки зрения оба этих случая выполняют одну и ту же функцию. Расположение двигателя на рисунке 1б более "биоморфно", поскольку втягивание линейного двигателя точно соответствует сокращению мышцы, расположенной между соседними костями сустава. Рисунок 2 иллюстрирует аналогичный способ расположения двигателей, охватывающих два шарнира, при этом двигатели действуют частично параллельно друг другу и не соединены просто последовательно.

Рисунок 2 - Два плоских манипулятора с тремя степенями свободы.
а - три последовательно расположенные вращательные двигатели;
б - два линейных двигателя, каждый из которых "охватывает" два шарнира.
Еще одним из подобных примеров является способ управления плоским движением исполнительного звена или стола. Два варианта, показанные на рисуноке 3, геометрически эквивалентны; все три ведущие цепи действуют полностью параллельно. Такая схема представляет собой полную противоположность схемы обычного "последовательного" привода, например, крестового стола фрезерного станка.

Рисунок 3 - Два трехступенных плоских манипулятора.
а - с "параллельно действующими" линейными двигателями;
б - с "параллельно действующими" вращательными двигателями в шарнирах А.
Гексапод
Одним из примеров параллельного механизма с 6-ю степенями свободы является гексапод (платформа Стюарта). Впервые кинематика гексапода был описана в работе Гауфа в 1956 г. На рисуноке 4 показана схема механизма, на рисуноке 5 практическая реализация схемы – многоцелевой фрезерный станок OKUMA PM-600.
Типичный гексапод выполнен на базе шести механизмов поступательного перемещения, представляющих собой, например, шариковые винтовые передачи ШВП. Для изменения их длины служат регулируемые электроприводы. Контроль за величиной перемещения осуществляется датчиками положения. Одним концом штанга шарнирно соединена с основанием, а другим (также шарнирно) - с подвижной платформой, на которой установлен рабочий орган, например, мотор-шпиндель. Управляя вылетом штанг по программе, можно управлять положением шпинделя по шести координатам: X,Y,Z и тремя углами поворота.

Рисунок 4 - Принципиальная схема станка-гексапода.

Рисунок 5 - Японский обрабатывающий центр OKUMA PM-600.
Таблица 1 - Элементы компоновки.

Ротопод
Другим примером шестиосевого механизма является ротопод. В данной схеме ведущие двигатели расположены в поворотных шарнирах основания, а штанги имеют постоянную длину. Этим обеспечивается относительно меньшая масса самого устройства и б0льшая скорость перемещения исполнительного узла, чем у механизма по схеме гексапод.

Рисунок 6 - Шести координатный поворотный стол по схеме «ротопод».
Дельта-механизм
Третьем примером 6-ти осевого параллельного механизма является дельта-механизм. Здесь ведущие вращательные двигатели расположены на основании, а каждая штанга разделена на две части. Первая полуштанга одним концом соединена с двигателем, другим концом - с карданным шарниром, связывающий её со второй полуштангой. Вторая полуштанга через сферический шарнир связана с платформой.
Главным достоинством предложенной схемы является её повышенная маневренность и расширенная граница рабочей зоны.

Рисунок 7 - Схема дельта-механизма
Трипод
Трипод является трехосевым механизмом, реализующим линейные перемещения исполнительного звена по трем осям X,Y,Z. В целом трипод является «упрощенной» версией гексапода. Однако, есть и отличия. Так как три штанги не могут обеспечить угловую жесткость, в конструкцию вводят четвертую центральную штангу, главной задачей которой является воспринимать изгибные напряжения.


Рисунок 8 - Промышленные роботы линейки Tricept
Преимущества механизмов с параллельной структурой:
- При малой массе подвижного ИО обеспечиваются более высокие скорости перемещений и ускорений;
- Механизмы отличаются высокой жесткостью, что обусловлено работой телескопического устройства на растяжение-сжатие и равномерным распределением усилий по всей структуре;
- Резкое снижение металлоемкости.
Формула Чебышева-Малышева
Для кинематического анализа рассмотренных механизмов существует формула Сомова-Малышева. Согласно данной формуле общее число H степеней подвижности механизма относительно неподвижного звена (основания) определяется следующим образом. Для пространственной кинематической структуры:

Для плоской кинематической структуры:

где k - общее число звеньев кинематической цепи;
pi- число кинематических пара с i-ой степенями подвижности (i=1..5).
Такими кинематическими парами являются: 1) сферический шарнир с тремя (i=3) степенями подвижности (вращение вокруг осей X,Y и Z) 2) карданный шарнир с двумя степенями подвижности (вращение вокруг осей X и Y); 3) соединение цилиндра и штока с двумя (i=2) степенями подвижности (осевое перемещение вдоль оси X и вращение штока относительно этой оси); 4) соединение цилиндра и штока со шпонкой с одной (i=1) степенью подвижности (перемещение штока вдоль оси X)

Рисунок 9 - Кинематические пары с 3-мя (а), 2-мя (б) и одной (в) степенями подвижности
После вычисления H необходимо проверить степень неподвижности H' кинематической структуры при условии, что все ведущие (активные) звенья неподвижны. Под ведущими понимают такие звенья, законы движения которых заданы (см. рисунок 4 обобщенные координаты h1,h2,...,h6). Звенья, законы которых однозначно определяются законами движения ведущих звеньев, будем называть ведомыми (пассивными)(см . рисунок 4 координаты позиционирования X,Y,Z, α, β, γ). Тогда для пространственной кинематической структуры:
Лекция "8 Непрерывные преобразования Фурье и Лапласа" также может быть Вам полезна.

Для плоской кинематической структуры:

где k'- число активных звеньев кинематичсекой цепи; p'i - число активных кинематичсеких пар с i степенями подвижности.
На основе вышеприведенных формул определяют следующее: если H'>0, то механизм нежесткий; если H'<0, то имеются избыточные механические связи и структуру следует изменить так, чтобы выполнялось условие H'=0.
P.S. Примеры использования данных формул будут рассмотрены в следующих статьях.



















