
Двигательный режим работы машины
9. Двигательный режим работы машины
(Темы 46, 47)
9.1. Обратимость машин
Пусть машина работает в режиме генератора на сеть с постоянным напряжением  .
.
В генераторном режиме ЭДС  машины, ток якоря
машины, ток якоря  > 0 и поступает в сеть (рис. 9.1, а). На валу машины действует электромагнитный момент МЭМ, направленный в рассматриваемом случае против часовой стрелки и против вращающего момента
> 0 и поступает в сеть (рис. 9.1, а). На валу машины действует электромагнитный момент МЭМ, направленный в рассматриваемом случае против часовой стрелки и против вращающего момента  (рис. 9.1, б).
(рис. 9.1, б).
При снижении тока возбуждения  уменьшается поток Ф и ЭДС машины Е, а следовательно, и ток в якоре. При значении ЭДС Е = U ток генератора и электромагнитный момент обратятся в нуль.
уменьшается поток Ф и ЭДС машины Е, а следовательно, и ток в якоре. При значении ЭДС Е = U ток генератора и электромагнитный момент обратятся в нуль.
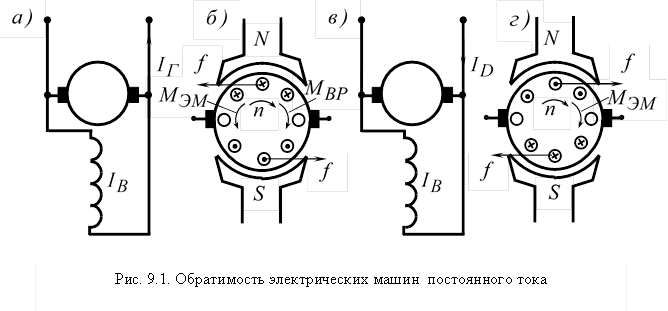
При дальнейшем понижении ЭДС машины вновь появится разность Е - U, но с противоположным знаком. В этом случае ток якоря  изменит свой знак и потечет из сети в машину (рис. 9.1, в). Поскольку
изменит свой знак и потечет из сети в машину (рис. 9.1, в). Поскольку  , направление тока в обмотке возбуждения и полярность основных полюсов останутся прежними, изменится знак электромагнитного момента
, направление тока в обмотке возбуждения и полярность основных полюсов останутся прежними, изменится знак электромагнитного момента  . Если прежде машина работала в режиме генератора и, развивая тормозящий момент, преобразовывала подводимую к ней механическую мощность в электрическую, то теперь она работает в режиме электродвигателя и развивает вращающий момент преодолевая момент сопротивления на валу МС и преобразовывая подводимую к ней мощность в механическую (рис. 9.1, г). Но при этом она продолжает вращаться в прежнем направлении.
. Если прежде машина работала в режиме генератора и, развивая тормозящий момент, преобразовывала подводимую к ней механическую мощность в электрическую, то теперь она работает в режиме электродвигателя и развивает вращающий момент преодолевая момент сопротивления на валу МС и преобразовывая подводимую к ней мощность в механическую (рис. 9.1, г). Но при этом она продолжает вращаться в прежнем направлении.
Таким же образом поведет себя машина, если, оставляя ток возбуждения неизменным, уменьшать частоту вращения якоря.
Рекомендуемые материалы
Отсоединив первичный двигатель, получим нормальную схему двигателя параллельного возбуждения (рис. 9.1, в).
Обратными действиями также плавно можно перевести ма- шину из двигательного в генераторный режим.
9.2. Энергетическая диаграмма
и уравнение моментов двигателя
Рассмотрим энергетический процесс на примере двигателя па-раллельного возбуждения. Пусть двигатель работает в установившемся режиме при  и напряжении на зажимах двигателя U. Если Р1 - полная электрическая мощность, подводимая к двигателю из сети, - ток в якоре и - ток возбуждения, то
и напряжении на зажимах двигателя U. Если Р1 - полная электрическая мощность, подводимая к двигателю из сети, - ток в якоре и - ток возбуждения, то
 . (9.1)
. (9.1)
Часть этой мощности тратится на покрытие потерь в цепи якоря  и в цепи возбуждения
и в цепи возбуждения  . Остальная часть мощности прообразовывается в электромагнитную -
. Остальная часть мощности прообразовывается в электромагнитную -  , которая, в свою очередь, преобразовывается в полную механическую мощность
, которая, в свою очередь, преобразовывается в полную механическую мощность  . Следовательно,
. Следовательно,
 . (9.2)
. (9.2)
 Полезная механическая мощность
Полезная механическая мощность  отдаваемая двигателем, меньше мощности
отдаваемая двигателем, меньше мощности  на величину мощности холостого хода
на величину мощности холостого хода  , необходимой для покрытия потерь в стали якоря
, необходимой для покрытия потерь в стали якоря  механических и добавочных потерь
механических и добавочных потерь  , то есть
, то есть
 (9.3)
(9.3)
Энергетическая диаграмма двигателя параллельного возбуждения изображена на рис. 9.2.
Электромагнитный момент двигателя
![]() , (9.4)
, (9.4)
 , (9.4)
, (9.4)который является вращающим, уравновешивает тормозящие моменты: момент ![]() , соответствующий потерям
, соответствующий потерям ![]() , покрываемым за счет механической мощности (9.3); М2 - момент нагрузки на валу, создаваемый рабочей машиной или механизмом;
, покрываемым за счет механической мощности (9.3); М2 - момент нагрузки на валу, создаваемый рабочей машиной или механизмом; ![]() динамический момент (8.7). При этом
динамический момент (8.7). При этом
 , покрываемым за счет механической мощности (9.3); М2 - момент нагрузки на валу, создаваемый рабочей машиной или механизмом;
, покрываемым за счет механической мощности (9.3); М2 - момент нагрузки на валу, создаваемый рабочей машиной или механизмом;  динамический момент (8.7). При этом
динамический момент (8.7). При этом . (9.5)
. (9.5)
Уравнение моментов на валу двигателя
 (9.6)
(9.6)
Обозначив статический момент сопротивления  получим
получим
 . (9.7)
. (9.7)
При установившемся режиме работы, поэтому  и
и
 . (9.8)
. (9.8)
(В дальнейшем индекс "эм" у будем опускать). Обычно  мал по сравнению с
мал по сравнению с  , и поэтому приблизительно можно считать, что при установившемся режиме работы электромагнитный момент
, и поэтому приблизительно можно считать, что при установившемся режиме работы электромагнитный момент  является полезным моментом на валу и уравновешивается моментом М2.
является полезным моментом на валу и уравновешивается моментом М2.
Момент машины  определяется как функция мощности
определяется как функция мощности  и угловой скорости вращения
и угловой скорости вращения 
 (9.9)
(9.9)
где  и
и  мощность, Вт; п - частота вращения, об/мин.
мощность, Вт; п - частота вращения, об/мин.
9.3. Уравнение напряжения и тока
В двигателях направление действия ЭДС якоря Е противоположно направлению тока якоря (см. 1.1), и поэтому Е называют также противоэлектродвижущей силой якоря. Напряжение для цепи якоря двигателя
 . (9.10)
. (9.10)
В режиме двигателя всегда  >
> .
.
Из (9.10) ток якоря
 , (9.11)
, (9.11)
где по (4.5) 
Решая уравнение (9.10) совместно с (4.5) относительно п, находим уравнение электромеханической характеристики  двигателя:
двигателя:
 . (9.12)
. (9.12)
Выразив значение тока из (4.12) и подставив его в (9.12), получим уравнение механической характеристики  двигателя:
двигателя:
 (9.I3)
(9.I3)
Вид механической и скоростной характеристик двигателя при U = сonst зависит от того, как с изменением нагрузки двигателя меняется магнитный поток машины Ф. Вид этих характеристик различен для двигателей с разными способами возбуждения.
9.4. Пуск двигателей постоянного тока
(Тема 48)
При пуске двигателей в ход необходимо:
1.Обеспечить надлежащий пусковой момент и условия для достижения необходимой скорости вращения.
2. Предотвратить возникновение чрезмерного пускового тока, опасного для двигателя.
При этом операция пуска должна быть экономичной по затрате энергии, а пусковая аппаратура - по возможности дешевой и надежной.
Возможны три способа пуска двигателей в ход:
1. Прямой пуск, когда цепь якоря непосредственно подключают к сети.
2. Пуск с помощью пусковых реостатов или пусковых сопротивлений (реостатный пуск), включаемых последовательно в цепь якоря.
3. Пуск при пониженном напряжении цепи якоря.
При п = 0 также Е = 0 и по выражению (9.11)
 (9.14)
(9.14)
В установившемся режиме в нормальных машинах ЭДС двигателя весьма близка к напряжению на зажимах якоря ( (0,94 – 0,98)UН. Поэтому при прямом пуске с U = UН ток якоря в 10 – 50 раз больше номинального. Вследствие этого, прямой пуск применяют только для двигателей мощностью несколько сот ватт, у которых  относительно велико и поэтому пусковой ток
относительно велико и поэтому пусковой ток  , а процесс пуска длится не более 1 – 2 секунд.
, а процесс пуска длится не более 1 – 2 секунд.
Самым распространенным способом пуска является пуск с помощью пускового реостата или пусковых сопротивлений (рис. 9.3). Вместо выражения (9.11) имеем
 (9.15)
(9.15)
а при п = 0
 (9.16)
(9.16)
где  - сопротивление пускового реостата, или пусковое сопротивление. Значение подбирают так, чтобы начальный ток был
- сопротивление пускового реостата, или пусковое сопротивление. Значение подбирают так, чтобы начальный ток был  (в малых машинах до (2 –2,5) IН ).
(в малых машинах до (2 –2,5) IН ).
Рассмотрим пуск двигателя параллельного возбуждения с помощью реостата по схеме рис. 9.3.
 Обмотка возбуждения двигателя постоянно подключена к контактной дуге, по которой скользит контакт П. Реостат в цепи обмотки возбуждения
Обмотка возбуждения двигателя постоянно подключена к контактной дуге, по которой скользит контакт П. Реостат в цепи обмотки возбуждения  при пуске ставят в положение
при пуске ставят в положение  . Это необходимо для того, чтобы и Ф при пуске были бы максимальными и постоянными, поскольку при этом, согласно выражению (4.14), при данных значениях тока якоря развивается наибольший момент М. Подвижный контакт П переводят из положения 0 в положение 1. По якорной обмотке пойдет ток , определяемый равенством (9.16), и возникнет момент М. Если М > MC, то якорь двигателя придет во вращение, скорость со значения п = 0 станет расти. В обмотке якоря будет индуктироваться ЭДС Е ~ п. Ток якоря и момент двигателя по (9.11) и (4.14), а вместе с ними и нарастание п будут уменьшаться. При
. Это необходимо для того, чтобы и Ф при пуске были бы максимальными и постоянными, поскольку при этом, согласно выражению (4.14), при данных значениях тока якоря развивается наибольший момент М. Подвижный контакт П переводят из положения 0 в положение 1. По якорной обмотке пойдет ток , определяемый равенством (9.16), и возникнет момент М. Если М > MC, то якорь двигателя придет во вращение, скорость со значения п = 0 станет расти. В обмотке якоря будет индуктироваться ЭДС Е ~ п. Ток якоря и момент двигателя по (9.11) и (4.14), а вместе с ними и нарастание п будут уменьшаться. При  изменение этих величин происходит по экспоненциальному закону.
изменение этих величин происходит по экспоненциальному закону.
Когда  достигнет значения
достигнет значения  контакт пускового реостата переводят в положение 2. Уменьшение
контакт пускового реостата переводят в положение 2. Уменьшение  приведет почти к мгновенному (из-за малой индуктивности цепи якоря) возрастанию тока, увеличится
приведет почти к мгновенному (из-за малой индуктивности цепи якоря) возрастанию тока, увеличится
М, п будет расти быстрее, а в результате роста Е уменьшится ток и момент (рис. 9.4)
При переключении контакта П в положение 3, 4, 5 процесс повторится, после чего двигатель достигнет установившегося значения работы со значениями  и п, определенными условиями
и п, определенными условиями  (см. равенства (4.14) и (9.13)
(см. равенства (4.14) и (9.13)
![]() Заштрихованные на рис. 9.4 ординаты представляют согласно (9.7) значения избыточного, динамического, момента
Заштрихованные на рис. 9.4 ординаты представляют согласно (9.7) значения избыточного, динамического, момента ![]() под воздействием которого происходит увеличение п.
под воздействием которого происходит увеличение п.
 Заштрихованные на рис. 9.4 ординаты представляют согласно (9.7) значения избыточного, динамического, момента
Заштрихованные на рис. 9.4 ординаты представляют согласно (9.7) значения избыточного, динамического, момента  под воздействием которого происходит увеличение п.
под воздействием которого происходит увеличение п.Число ступеней реостата и значения их сопротивлений выбирают таким образом, чтобы максимальные и минимальные значения тока были бы на всех ступенях одинаковы.
После отключения двигателя от сети обмотка возбуждения должна быть замкнута на обмотку якоря. При этом ток в обмотке возбуждения уменьшается до нуля не мгновенно, а с достаточно большой постоянной времени, чем предотвращается индуктирование в этой обмотке большой ЭДС самоиндукции, которая может повредить изоляцию этой обмотки.
Нельзя допускать разрыва цепи параллельного возбуждения. В случае разрыва цепи поток возбуждения исчезает не сразу, а поддерживается индуктируемыми в ярме вихревыми токами. Однако поток быстро уменьшается и скорость по (9.12) увеличивается в несколько раз ("разнос" двигателя) При этом значительно возрастает ток якоря, что приводит к круговому огню по коллектору и выходу машины из строя.
Ограничение пускового тока достигается также в случае питания цепи якоря при пуске от отдельного источника тока с регулируемым напряжением (отдельный генератор постоянного тока, управляемый выпрямитель). Обмотку возбуждения необходимо питать от источника с полным напряжением, чтобы иметь полный ток возбуждения  . Этот способ применяют для двигателей большой мощности, как правило, в сочетании с регулированием частоты вращения (см. с.94).
. Этот способ применяют для двигателей большой мощности, как правило, в сочетании с регулированием частоты вращения (см. с.94).
9.5. Реверсирование двигателей
Направление электромагнитной силы, действующей на проводник с током, зависит от направления тока, и магнитного поля. Следовательно, для изменения направления вращения (реверсирования) двигателя необходимо и до-
 статочно изменить направление тока в обмотке якоря или в обмотке возбуждения (рис. 9.5).
статочно изменить направление тока в обмотке якоря или в обмотке возбуждения (рис. 9.5).
При изменении направления тока в якоре при наличии обмоток добавочных полюсов или компенсационной одновременно меняются направления токов в них. Иначе МДС этих обмоток будут усиливать МДС обмотки якоря вместо того, чтобы уничтожать ее.
Для реверсирования машин смешанного возбуждения необходимо изменять направление тока только в якоре или одновременно
в обеих обмотках возбуждения. В противном случае нарушится согласованное действие последовательной и параллельной обмоток.
9.6. Устойчивость работы двигателей
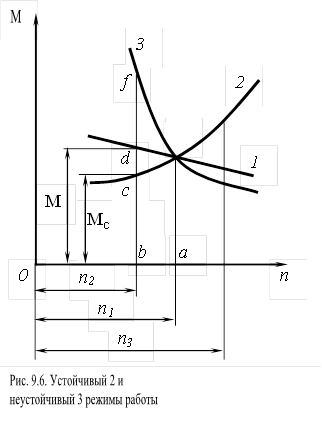
Под устойчивостью работы двигателя понимают его способность вернуться к исходному, установившемуся режиму работы при малых возмущениях, когда действие этих возмущений прекратится. Двигатель неустойчив в работе, если подобные малые возмущения приводят к большим изменениям режима работы.
Неустойчивая работа может быть также и у генераторов. В разделе 8.6 рассмотрена неустойчивость параллельной работы генераторов смешанного возбуждения при отсутствии уравнительного провода. Примером неустойчивой работы является режим самовозбуждения генераторов.
Устойчивость работы двигателя определяется его механической характеристикой , зависимостью момента сопротивления на валу  , свойствами рабочей машины, приводимой в движение двигателем. У металлорежущих станков при постоянной подаче резца момент сопротивления и не зависит от частоты вращения. У вентиляторов и насосов момент пропорционален второй степени частоты вращения.
, свойствами рабочей машины, приводимой в движение двигателем. У металлорежущих станков при постоянной подаче резца момент сопротивления и не зависит от частоты вращения. У вентиляторов и насосов момент пропорционален второй степени частоты вращения.
Пусть вращающий момент двигателя М и момент сопротивления  , создаваемый исполнительным механизмом на валу двигателя, заданы кривыми 1 и 2 (рис. 9.6) и пересекаются в точке А. Если частота вращения п уменьшится от значения
, создаваемый исполнительным механизмом на валу двигателя, заданы кривыми 1 и 2 (рис. 9.6) и пересекаются в точке А. Если частота вращения п уменьшится от значения  до значения
до значения  , то на валу двигателя возникнет положительный динамический момент, под действием которого частота двигателя начнет расти, пока не достигнет своего прежнего значения п1.
, то на валу двигателя возникнет положительный динамический момент, под действием которого частота двигателя начнет расти, пока не достигнет своего прежнего значения п1.
В обратном случае, если частота вращения возрастает до значения п3 , то при > возникает отрицательный динамический момент, и частота вращения начинает уменьшаться пока не достигнет значения п1.
возникает отрицательный динамический момент, и частота вращения начинает уменьшаться пока не достигнет значения п1.
Следовательно, в заданных условиях работы электроагрегата точка А является точкой его устойчивой работы. В общем случае устойчивая работа электроагрегата обеспечивается при условии
 <
< . (9.17)
. (9.17)
Теперь предположим, что зависимость имеет вид кривой 3 (см. рис.9.6). В этом случае уменьшение частоты вращения повлечет за собой появление на валу отрицательного динамического момента  , под действием которого частота вращения двигателя еще более уменьшится, что вызовет дальнейший рост отрицательного момента
, под действием которого частота вращения двигателя еще более уменьшится, что вызовет дальнейший рост отрицательного момента  . Увеличение частоты вращения повлечет появление положительного динамического момента на валу и еще большее увеличение частоты вращения. Следовательно, в этих условиях двигатель работает неустойчиво. Условие неустойчивой работы агрегата:
. Увеличение частоты вращения повлечет появление положительного динамического момента на валу и еще большее увеличение частоты вращения. Следовательно, в этих условиях двигатель работает неустойчиво. Условие неустойчивой работы агрегата:
>. (9.18)
Двигатели постоянного тока, как и переменного, обладают при соблюдении условий устойчивости способностью автоматически, без внешнего регулирующего воздействия, приспосабливаться к изменившимся условиям работы, обладают свойством саморегулирования.
Рассмотрим двигатель параллельного возбуждения.
 Допустим, что такой двигатель работает при ,
Допустим, что такой двигатель работает при ,  и, следовательно,
и, следовательно,  и нагрузочный момент , развиваемый рабочей машиной, увеличивается. Тогда < , возникает, согласно (9.7), отрицательный динамический момент и п начинает уменьшаться. Но при этом будет уменьшаться Е; ток IЯ и момент М по (9.11) и (4.14) начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие электромагнитного и статического моментов. Аналогично изменяется режим, если МС уменьшится, причем в этих случаях п и Е начнут увеличиваться, а IЯ и М уменьшаться до тех пор, пока снова не будет
и нагрузочный момент , развиваемый рабочей машиной, увеличивается. Тогда < , возникает, согласно (9.7), отрицательный динамический момент и п начинает уменьшаться. Но при этом будет уменьшаться Е; ток IЯ и момент М по (9.11) и (4.14) начнут увеличиваться, причем это будет происходить до тех пор, пока снова не наступит равновесие электромагнитного и статического моментов. Аналогично изменяется режим, если МС уменьшится, причем в этих случаях п и Е начнут увеличиваться, а IЯ и М уменьшаться до тех пор, пока снова не будет  и
и  .
.
Допустим, что с по-мощью реостата (рис. 8.1,б) уменьшен ток . При этом Фd будет уменьшаться, однако вследствие механической инерции якоря частота вращения п в первый момент не изменится, ЭДС Е, согласно (4.5), уменьшится, а вследствие этого и М возрастут.
При этом электромагнитный момент (вращающий) станет больше нагрузочного (статического). В соответствии с равенством (9.7) и под действием положительного динамического момента частота вращения п начнет увеличиваться Это вызовет увеличение Е и уменьшение и М до тех пор, пока снова не наступит равновесие моментов  и уменьшение динамического момента до нуля (рис. 9.7).
и уменьшение динамического момента до нуля (рис. 9.7).
При увеличении явления развиваются в обратном направлении. Следует отметить, что резких изменений при регулировании допускать нельзя, так как U и Е по (9.10) являются близкими по значению и небольшое изменение Фd и Е ведет к большим изменениям и М.
Аналогично происходит переход к новому режиму при изменении других внешних условий (например, введение сопротивления в цепь якоря), а также в двигателях с иными способами возбуждения. Из изложенного следует, что поведение двигателя при установившемся режиме работы и переходах к новому режиму всецело определяется уравнениями равновесия моментов (9.7) и напряжения цепи якоря (9.10).
9.7. Двигатели параллельного возбуждения
 Естественные электромеханическая и механическая характеристики двигателя определяются равенствами (9.12) и (9.13) при и
Естественные электромеханическая и механическая характеристики двигателя определяются равенствами (9.12) и (9.13) при и  . Характеристики называются естественными, если в цепи якоря отсутствует дополнительное сопротивление. При установке щеток на геометрической нейтрали с увеличением тока IЯ магнитный поток Фd несколько уменьшится, вследствие действия поперечной реакции якоря. Согласно (9.12) частота вращения п возрастет. Падение напряжения
. Характеристики называются естественными, если в цепи якоря отсутствует дополнительное сопротивление. При установке щеток на геометрической нейтрали с увеличением тока IЯ магнитный поток Фd несколько уменьшится, вследствие действия поперечной реакции якоря. Согласно (9.12) частота вращения п возрастет. Падение напряжения  вызовет уменьшение частоты вращения. Таким образом, возможны три вида характеристики (рис. 9.8): 1 – преобладает влияние ; 2 – при взаимной компенсации влияния и уменьшения Фd; 3 – преобладает влияние уменьшения Фd.. Ввиду того, что изменение Фd относительно мало, механические характеристики двигателя параллельного возбуждения, при
вызовет уменьшение частоты вращения. Таким образом, возможны три вида характеристики (рис. 9.8): 1 – преобладает влияние ; 2 – при взаимной компенсации влияния и уменьшения Фd; 3 – преобладает влияние уменьшения Фd.. Ввиду того, что изменение Фd относительно мало, механические характеристики двигателя параллельного возбуждения, при  совпадают по виду с характеристиками (см. рис. 9.8).
совпадают по виду с характеристиками (см. рис. 9.8).
Характеристики вида 3 (рис. 9.8) неприемлемы по условиям устойчивости работы. Поэтому двигатели параллельного возбуждения изготовливают со слегка падающими характеристиками вида 1.
В высокоиспользованных машинах, вследствие насыщения зубцов якоря поперечная реакция якоря носит размагничивающий характер и получить характеристику вида 1 невозможно. В этом случае на главных полюсах устанавливается легкая последовательная (стабилизирующая) обмотка возбуждения, компенсирующая уменьшение потока  под действием поперечной реакции якоря.
под действием поперечной реакции якоря.
 Слабая зависимость частоты вращения двигателя параллельного возбуждения от нагрузки составляет одно из самых характерных свойств этого двигателя. Такую характеристику называют жесткой.
Слабая зависимость частоты вращения двигателя параллельного возбуждения от нагрузки составляет одно из самых характерных свойств этого двигателя. Такую характеристику называют жесткой.
Регулировать частоту вращения можно изменением магнитного потока, сопротивления цепи якоря, величины питающего напряжения (см. формулу (9.12).
Регулирование частоты изменение м магнитного потока применяют широко вследствие его простоты и экономичности, так как регулирование осуществляют в относительно маломощной цепи возбуждения. Магнитный поток изменяют в сторону уменьшения, потому что в номинальном режиме магнитная цепь машины близка к насыщению, и при увеличении магнитного потока значительно возрастает ток и увеличиваются потери и нагрев двигателя. Регулируют ток возбуждения по схеме рис. 9.3 с помощью реостата в цепи возбуждения  . При отсутствии добавочного сопротивления в цепи якоря
. При отсутствии добавочного сопротивления в цепи якоря  и определяемые равенствами (9.12) и (9.13) характеристики и для разных значений
и определяемые равенствами (9.12) и (9.13) характеристики и для разных значений  , имеют вид, показанный на рис. 9.9. Уменьшение магнитного потока приведет к увеличению частоты вращения идеального холостого хода
, имеют вид, показанный на рис. 9.9. Уменьшение магнитного потока приведет к увеличению частоты вращения идеального холостого хода  . Все характеристики
. Все характеристики  при п = 0 сходятся на оси абсцисс в общей точке (рис. 9.10, а) при весьма большом токе якоря по (9.11):
при п = 0 сходятся на оси абсцисс в общей точке (рис. 9.10, а) при весьма большом токе якоря по (9.11):
 (9.19)
(9.19)
 Механические характеристики пересекают ось абсцисс в разных точках (рис. 9.10, б). Номинальному потоку (рис.9.9) соответствует нижняя – естественная – характеристика, остальные характеристики называют искусственными. В установившемся режиме значения п соответствуют точкам пересечения рассматриваемых характеристик с кривой
Механические характеристики пересекают ось абсцисс в разных точках (рис. 9.10, б). Номинальному потоку (рис.9.9) соответствует нижняя – естественная – характеристика, остальные характеристики называют искусственными. В установившемся режиме значения п соответствуют точкам пересечения рассматриваемых характеристик с кривой  (рис.9.9) для рабочей машины. Точка холостого хода двигателя
(рис.9.9) для рабочей машины. Точка холостого хода двигателя  лежит несколько правее оси ординат. С увеличением частоты вращения двигателя п возрастают ток и момент холостого хода, из-за увеличения механических потерь мощности.
лежит несколько правее оси ординат. С увеличением частоты вращения двигателя п возрастают ток и момент холостого хода, из-за увеличения механических потерь мощности.
Диапазон регулирования частоты вращения при данном способе равен 3 – 4.
По условиям нагрева ДПТ не может быть нагружен номинальным моментом при уменьшении магнитного потока, так как
 , (9.20)
, (9.20)
где  магнитный поток по искусственной характеристике.
магнитный поток по искусственной характеристике.
Если при холостом ходе с помощью приложенного извне момента увеличивать частоту вращения п,  (по (4.5) будет увеличиваться, а ток и момент уменьшатся, как следует из (9.12) и (4.14). При равенстве тока якоря и момента нулю механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности. При дальнейшем увеличении частоты вращения ток IЯ и момент М изменят знак и двигатель перейдет в генераторный режим, посылая в сеть ток, величина которого пропорциональна разности ЭДС и напряжения:
(по (4.5) будет увеличиваться, а ток и момент уменьшатся, как следует из (9.12) и (4.14). При равенстве тока якоря и момента нулю механические и магнитные потери двигателя покрываются за счет подводимой к валу механической мощности. При дальнейшем увеличении частоты вращения ток IЯ и момент М изменят знак и двигатель перейдет в генераторный режим, посылая в сеть ток, величина которого пропорциональна разности ЭДС и напряжения:

Чем выше частота вращения двигателя, тем больше ток якоря, а вместе с ним и электромагнитный момент  , ставший в данном случае тормозным. Эту способность двигателя используют на практике для электрического торможения двигателя (например, электровоза, идущего под гору) с отдачей электроэнергии в сеть. Такой способ торможения называют рекуперативным. При невозмо-жности отдачи энергии в сеть цепь якоря двигателя замыкают (отключая от сети) на нагрузочное сопротивление. Торможение по такому способу называют динамическим.
, ставший в данном случае тормозным. Эту способность двигателя используют на практике для электрического торможения двигателя (например, электровоза, идущего под гору) с отдачей электроэнергии в сеть. Такой способ торможения называют рекуперативным. При невозмо-жности отдачи энергии в сеть цепь якоря двигателя замыкают (отключая от сети) на нагрузочное сопротивление. Торможение по такому способу называют динамическим.
 Регулирование частоты вращения сопротивлением в цепи якоря.
Регулирование частоты вращения сопротивлением в цепи якоря.
Если последовательно в цепь якоря включить добавочное сопротивление  (рис. 9.11, а), то вместо выражений (9.12) и (9.1З) получим
(рис. 9.11, а), то вместо выражений (9.12) и (9.1З) получим
 (9.21)
(9.21)
 . (9.22)
. (9.22)
Как показано в разделе 9.6, с введением в цепь якоря добавочного сопротивления двигатель перейдет в новый режим работы автоматически. С увеличением сопротивления уменьшится ток и момент.
За счет преобладающего момента сопротивления частота вращения уменьшится, что приведет к уменьшению ЭДС и увеличению тока. Такие изменения режима будут происходить до тех пор, пока моменты на валу не уравновесятся. Двигатель перейдет в новый установившийся режим с уменьшенной частотой вращения. Характер переходного процесса представлен на рис. 9.11, б.
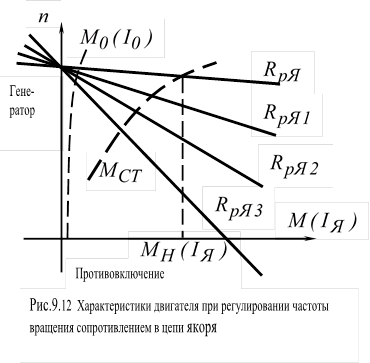
Механические и электромеханические характеристики для различных значений сопротивлений  при и
при и 
 изображены на рис. 9.12. Верхняя характеристика
изображены на рис. 9.12. Верхняя характеристика  является естественной. По характеристикам (рис. 9.12) видно изменение их наклона при варьировании сопротивления добавочного, регулировочного, резистора
является естественной. По характеристикам (рис. 9.12) видно изменение их наклона при варьировании сопротивления добавочного, регулировочного, резистора  .Частота вращения холостого хода
.Частота вращения холостого хода  не зависит от , поэтому все искусственные характеристики пересекаются на оси частоты вращения в точке с координатой
не зависит от , поэтому все искусственные характеристики пересекаются на оси частоты вращения в точке с координатой  ,
,  . Наклон характеристик при фиксированных значениях тока и момента определяется перепадом частоты вращения
. Наклон характеристик при фиксированных значениях тока и момента определяется перепадом частоты вращения
 и
и 
и пропорционален полному сопротивлению якорной цепи. Поэтому по мере увеличения  наклон характеристик увеличивается, они становятся более мягкими.
наклон характеристик увеличивается, они становятся более мягкими.
Каждая из характеристик пересекает ось абсцисс (п = 0) в точке, для которой
 (9.23)
(9.23)
Если момент механизма, приводимого во вращение двигателем, зависит от частоты вращения (например, у вентиляторов, насосов и т.д.), то при введении добавочного сопротивления в цепь якоря частота вращения двигателя будет падать меньше, чем при  . (точки пересечения жирной штриховой кривой с механическими характеристиками).
. (точки пересечения жирной штриховой кривой с механическими характеристиками).
Продолжения этих характеристик под осью абсцисс (см. рис. 9.12) соответствуют торможению двигателя методом противовключения. В этом случае,  < 0 ЭДС Е меняет знак на противоположный, вследствие чего
< 0 ЭДС Е меняет знак на противоположный, вследствие чего
 . (9.24)
. (9.24)
Момент двигателя М действует против направления вращения механизма и является поэтому тормозящим. Двигатель развивает значительный момент и поэтому торможение является весьма эффективным. Токи, достигающие при этом опасных для целостности машины значений, следует ограничивать.
Если в режиме холостого хода  ) с помощью приложенного извне момента увеличивать частоту вращения, то сначала достигается режим
) с помощью приложенного извне момента увеличивать частоту вращения, то сначала достигается режим  , а затем изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 9.12 слева от оси ординат).
, а затем изменит направление и машина перейдет в режим генератора (участки характеристик на рис. 9.12 слева от оси ординат).
Регулирование частоты вращения изменением сопротивления в цепи якоря неэкономично. Действительно, мощность на валу двигателя до регулирования
 , (9.25)
, (9.25)
после регулирования

причем  <, так как
<, так как  <
<  .
.
Мощность же подведенная к двигателю
 (9.26)
(9.26)
остается неизменной до и после регулирования, так как токи в якоре остаются теми же (при  только при прежнем токе якоря, поскольку поток остается неизменным).
только при прежнем токе якоря, поскольку поток остается неизменным).
Следовательно,
 (9.27)
(9.27)
откуда
 (9.28)
(9.28)
т. е. КПД установки при регулировании частоты вращения добавочным сопротивлением в цепи якоря пропорционален уменьшению частоты вращения.
Диапазон данного способа регулирования небольшой (в пределах 2–3), что связано с большими потерями мощности при больших диапазонах регулирования. Технико-экономические показатели этого способа не высоки. Но из-за простоты реализации способ широко используют при небольших диапазонах регулирования или при кратковременной работе установки на пониженных скоростях. Регулирование частоты вращения можно вести только вниз от номинальной.
Регулирование частоты вращения изменением напряжения на якоре реализуется с помощью агрегата " генератор - двигатель" Г-Д. Первичный двигатель ПД (на рис. 9.13 – асинхронный двигатель) вращает с постоянной скоростью генератор постоянного тока Г. Обмотка якоря генератора непосредственно соединена с обмоткой якоря, двигателя постоянного тока Д который служит приводом рабочей машины РМ. Обмотки возбуждения генератора ОВГ и двигателя ОВД питаются от независимого источника - сети постоянного тока или от возбудителей (небольших генераторов постоянного тока), на валу первичного двигателя ПД. Переключатель П предназначен для реверсирования двигателя.
Пуск двигателя и регулирование частоты вращения осуществляют следующим образом. При максимальном  и
и  производят пуск первичного двигателя ПД. Плавно увеличивают ток
производят пуск первичного двигателя ПД. Плавно увеличивают ток  , изменяя сопротивление
, изменяя сопротивление  , включенное по потенциометрической схеме.
, включенное по потенциометрической схеме.
При резко пульсирующей нагрузке рабочей машины (например, прокат- ные станы) двигатель Д снабжают маховиком.
В последнее время двигатель ПД и генератор Г заменяют полупроводниковым выпрямителем с регулируемым напряжением. В этом случае рассматриваемый агрегат называют также вентильным (например, тиристорным) приводом.
Рассмотренные агрегаты используют при необходимости регулирования частоты вращения двигателя в широких пределах - до 1:100 и более. При этом КПД сохраняется неизменным практически во всем диапазоне скоростей.
Уменьшение частоты вращения, а следовательно и полезной мощности, почти пропорционально напряжению.
 95
95
Потребляемая мощность также уменьшается пропорционально напряжению (см. выражения (9.25) и (9.26)
 Рабочие характеристики представляют зависимости потребляемой P1 и полезной Р2 мощности, частоты вращения п, момента М и КПД h от потребляемого тока I при U = const и неизменных положениях регулирующих реостатов. На практике рабочие характеристики часто представляют зависимостями
Рабочие характеристики представляют зависимости потребляемой P1 и полезной Р2 мощности, частоты вращения п, момента М и КПД h от потребляемого тока I при U = const и неизменных положениях регулирующих реостатов. На практике рабочие характеристики часто представляют зависимостями  , при . Однако при анализе работы двигателя большую наглядность имеют рабочие характеристики, снятые в зависимости от потребляемого тока.
, при . Однако при анализе работы двигателя большую наглядность имеют рабочие характеристики, снятые в зависимости от потребляемого тока.
Моментная характеристика  в большом диапазоне нагрузок прямолинейна. При нагрузках, близких или превосходящих номинальные, характеристика теряет свою прямолинейность, склоняясь к оси абсцисс. Это объясняется действием МДС обмотки якоря, которая уменьшает поток в зазоре, а вместе с ним и момент, пропорциональный потоку (рис. 9.15). Энергетическая характеристика
в большом диапазоне нагрузок прямолинейна. При нагрузках, близких или превосходящих номинальные, характеристика теряет свою прямолинейность, склоняясь к оси абсцисс. Это объясняется действием МДС обмотки якоря, которая уменьшает поток в зазоре, а вместе с ним и момент, пропорциональный потоку (рис. 9.15). Энергетическая характеристика  приведена в разделе 7.2. Зависимость подведенной и отданной двигателем мощности показана на рис. 9.15. Мощность P1 = UI при U = const пропорциональна току и выражается прямой. Полезная мощность на валу Р2 = hР1. Следовательно, форма зависимости определяется кривой
приведена в разделе 7.2. Зависимость подведенной и отданной двигателем мощности показана на рис. 9.15. Мощность P1 = UI при U = const пропорциональна току и выражается прямой. Полезная мощность на валу Р2 = hР1. Следовательно, форма зависимости определяется кривой  . В основном линия мощности Р2 почти прямая, несколько искривленная на малых нагрузках и перегрузках.
. В основном линия мощности Р2 почти прямая, несколько искривленная на малых нагрузках и перегрузках.
9.8. Двигатели последовательного возбуждения.
Естественные электромеханические и механические характеристики, область применения. В двигателях последовательного возбуждения ток якоря одновременно является также
током возбуждения:  . Поэтому поток Ф изменяется в широких пределах и можно написать
. Поэтому поток Ф изменяется в широких пределах и можно написать
 . (9.29)
. (9.29)
Коэффициент пропорциональности  в значительном диапазоне нагрузок (при I < IН ) практически постоянен и лишь при I > (0,8¸0,9) IН вследствие насыщения магнитной цепи) начинает уменьшаться.
в значительном диапазоне нагрузок (при I < IН ) практически постоянен и лишь при I > (0,8¸0,9) IН вследствие насыщения магнитной цепи) начинает уменьшаться.
Для двигателя последовательного возбуждения с учетом (9.29)
уравнения частоты вращения и моментов следующие:
 , (9.30)
, (9.30)
 , (9.31)
, (9.31)
 (9.32)
(9.32)
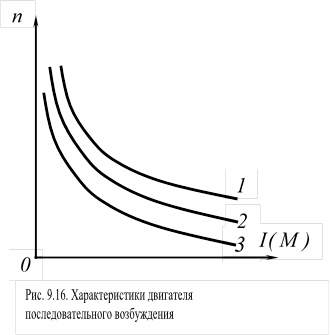
Электромеханическая характеристика по выражению (9.30) является мягкой и имеет гиперболический характер (рис. 9.16). При малых токах скорость вращения двигателя становится недопустимо большой. Поэтому работа двигателя последовательного возбуждения, за исключением самых маленьких (имеющих высокое сопротивление якоря), на холостом ходу не допускается. Обычно минимально допустимая нагрузка Р2 = (0.2 – 0.25)PH
Естественная механическая характеристика 2 (рис. 9.16) имеет вид аналогичный виду электромеханической характеристики двигателя последовательного возбуждения.
Поскольку у двигателей параллельного возбуждения момент М~ I, а у двигателей последовательного возбуждения приблизительно ~ и при пуске допускается I = (I.5 – 2.0) IН, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения.
и при пуске допускается I = (I.5 – 2.0) IН, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения.
Кроме того, у двигателей параллельного возбуждения п = const, а у двигателей последовательного возбуждения, как следует из (9.30) и (9.31), (при RЯ = 0)
~ ~
~ 
Поэтому у двигателей параллельного возбуждения мощность P2 = WM = 2pnM ~ М, а у двигателей последовательного - P2 = WM = = 2pnM ~ .
.
Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки  в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения. Этим двигателям менее опасны перегрузки по моменту, поэтому они имеют существенное преимущество в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются в подъемно-транспортных механизмах и для электрической тяги (трамваи, троллейбусы, электровозы, тепловозы, экскаваторы) .
в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения. Этим двигателям менее опасны перегрузки по моменту, поэтому они имеют существенное преимущество в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются в подъемно-транспортных механизмах и для электрической тяги (трамваи, троллейбусы, электровозы, тепловозы, экскаваторы) .
При повышении частоты вращения двигатель не переходит в генераторный режим (характеристика  не пересекает ось ординат). Это объясняется тем, что при переходе в режим генератора, при заданном направлении вращения и заданной полярности напряжения, направление тока должно изменяться на обратное, а направление ЭДС Е и полярность полюсов должны сохраняться неизменными, что при изменении направления тока в обмотке возбуждения невозможно.
не пересекает ось ординат). Это объясняется тем, что при переходе в режим генератора, при заданном направлении вращения и заданной полярности напряжения, направление тока должно изменяться на обратное, а направление ЭДС Е и полярность полюсов должны сохраняться неизменными, что при изменении направления тока в обмотке возбуждения невозможно.
Способы регулирования частоты вращения этих двигателей те же, что и двигателей параллельного возбуждения.
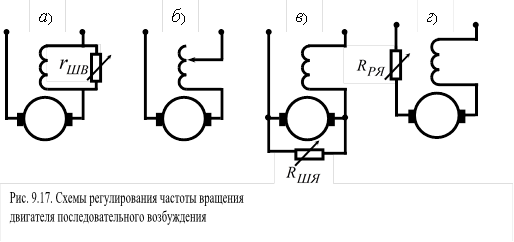
Регулирование частоты вращения двигателей последовательного возбуждения изменением магнитного потока возможно двумя способами:
1. Шунтированием или секционированием обмотки возбуждения, когда требуется повышение частоты вращения сверх номинальной (рис. 9.17, а, б)
2. Шунтированием обмотки якоря, когда требуется снижение частоты вращения против номинальной (рис. 9.17, в).
Уменьшением величины сопротивления, шунтирующего обмотку возбуждения, уменьшают ток этой обмотки, а следовательно, и поток ее. Частота вращения двигателя увеличивается. При этом
 (9.33)
(9.33)
 Практически неизменная величина КПД установки объясняется следующим. Сопротивление обмотки возбуждения
Практически неизменная величина КПД установки объясняется следующим. Сопротивление обмотки возбуждения  и падение напряжения на нем малы, поэтому
и падение напряжения на нем малы, поэтому  также мало. Потери в сопротивлении незначительны, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого КПД двигателя остается высоким, и такой способ регулирования широко применяют на практике.
также мало. Потери в сопротивлении незначительны, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого КПД двигателя остается высоким, и такой способ регулирования широко применяют на практике.
При уменьшении величины сопротивления, шунтирующего якорь, увеличивается ток обмотки возбуждения - частота вращения двигателя уменьшается. При этом  <
<  , но
, но >I и
>I и  >
>  , (9.34)
, (9.34) <
<  и
и
 <
<  . (9.35)
. (9.35)
Так как падение напряжения  мало, то сопротивление
мало, то сопротивление  фактически находится под полным напряжением сети, его значение должно быть значительным, потери в нем будут велики и КПД сильно уменьшится.
фактически находится под полным напряжением сети, его значение должно быть значительным, потери в нем будут велики и КПД сильно уменьшится.
Лекция "Формирование инвестиционного замысла проекта" также может быть Вам полезна.
Следует отметить, что шунтирование якоря эффективно только при ненасыщенной магнитной цепи. На практике шунтирование якоря используется редко.
Регулирование частоты вращения двигателя включением сопротивления в цепь якоря позволяет регулировать по схеме рис. 9.16, г частота вращения п изменяется вниз от номинальной. Такой способ регулирования находит ограниченное применение вследствие значительных потерь на регулировочном сопротивлении. Электромеханическая (механическая) характеристика показана на рис. 9.16, кривая 3.
Рабочие характеристики. Моментная характеристика двигателя последовательного возбуждения в пределах номинальных нагрузок с учетом (9.32) представляется параболой
 (9.36)
(9.36)
При нагрузках выше номинальных вследствие насыщения магнитной цепи поток остается постоянным и характеристика имеет линейный характер (рис. 9.18).
Зависимости  не отличаются от подобных зависимостей двигателя параллельного возбуждения (см. рис. 9.15).
не отличаются от подобных зависимостей двигателя параллельного возбуждения (см. рис. 9.15).



















